自动化立体仓储系统的设计和多目标优化*
2023-01-03崔金华代迪迪王汝佳
□ 崔金华 □ 汪 伟 □ 代迪迪 □ 王汝佳 □ 石 旭 □ 颜 韩
江苏理工学院 汽车与交通工程学院 江苏常州 213001
1 研究背景
在我国电商产业繁荣以及中国制造2025的大背景下,国家和企业都致力于实现数字化技术与先进制造业相结合,从而促进新一轮工业变革。货物的储存和取放处于制造业的中间环节,解决货物存储问题是制造业升级的核心问题之一。而自动化立体仓储系统的特点是有超大的存储量、高效率的货物存取以及精准的货物信息管理,这也使其成为现代化制造业中最重要的系统之一。多数自动化立体仓储系统存储量较大、货物类别复杂,面对这种大型立体自动化仓储系统,如果事先没有对其货位进行有效的设计规划,在仓储作业过程中必然会发生穿梭车和货物提升装置运行混乱的局面,导致自动化立体仓储系统运行效率低下,进而影响整个企业的物料供应体系。为了避免上述问题的发生,在设计自动化立体仓储系统时,必须对立体仓储货位分配情况进行合理的优化。
目前,很多学者对自动化立体仓储系统设计和货位优化方面做了深刻的研究。曹浪财等[1]设计了自动化立体仓储可视化系统,并对复杂货物进行了货位优化管理。李民权等[2]提出智能立体仓储系统的设计方案。马婷等[3]提出基于最小时间算法的出入库优化方法,实现了均衡叉车工作量和进出货总时间的优化目标。Xu Wei等[4]综合考虑单一作业方式未实现仓库出入库作业所需的质心、频率和时间等要求,建立了多目标优化问题的数学模型。文献[5-8]构建了以货架稳定性和仓储运行效率为优化目标的数学模型,并设计混合优化算法对目标函数进行求解。杨永永等[9]将射频识别技术与改进克隆算法相结合,从而对立体仓储货位分配进行了动态优化。李鹏飞等[10]考虑仓储货架安全性和仓储运行效率因素来构建数学模型,通过病毒协同遗传算法对目标函数进行求解。文献[11-13]提出基于货品相关性和货架中货品总出库频次的货位优化方法,并通过两阶段智能算法求解。
笔者在其它学者研究的基础上,设计了一款自动化立体仓储系统,根据出入库效率、货架稳定性、同类物品先入先出等因素,建立优化数学模型,并通过多目标遗传算法求解目标函数。
2 自动化立体仓储系统设计
2.1 自动化立体仓储系统运行原理
该仓储长为6 m,宽为3 m,仓储分为5层,可利用高度为4 m。仓储两侧为货架,货架中间为穿梭车运行通道,仓储起始端是以交流电机作为动力源的货物提升装置,仓储终端以交流电机作为动力源的穿梭车提升装置。由上述可知,仓储每层7列,共有140个仓位,待系统验证成熟,可根据企业场地需求进行扩大设计。自动化立体仓储系统主要由自动化立体仓库、穿梭车、提升装置、辊筒运输机构组成,自动化立体仓储系统实物场景如图1所示。

图1 自动化立体仓储系统实物场景
笔者设计的自动化立体仓储系统采用两种控制模式,即手动控制模式和自动控制模式。其中,手动控制模式主要用于设备运行前的调试。根据电路设计要求,手动控制模式使用常开控制,为了保证系统的稳定性,手动控制模式和自动控制模式形成电路互锁,即二者不可同时运行。具体工作流程如下:将功能开关置于自动位置,系统上电后进行自检;当按下启动按钮后,可编程序控制器控制系统得到信号,从而控制伺服电机驱动穿梭车运动;在正常情况下,按下自动按钮,系统将进行相应的动作,此时触摸屏上会显示穿梭车位于仓储的第n层第m列,以及运动状态;当仓储设备系统发生故障时,驱动程序停止执行、蜂鸣器闪烁报警,待报警解除后,控制程序将再次执行。
2.2 穿梭车系统设计
随着仓储系统的发展,穿梭车凭借显著优势成为该领域必要的组成部分,设计开发的四向穿梭车属于该领域技术水平较为先进的一代产品。四向穿梭车在仓储系统中可以完成横向运动和纵向运动,灵活高效的运动方式,使其可以跨轨道取送货物,从而实现货物存取效率最大化。但是,灵活的运动范围意味着更复杂的调度工作,因此目前应用并不广泛。随着对物流系统的成本和稳定性要求越来越高,四向穿梭车系统将得到越来越广泛的关注。穿梭车通过控制器局域网总线与高速无线网络或4G移动数据网络通信,接收可编程序控制器指令后,通过伺服编码器+定位光电组合,实现精准定位。穿梭车到达指定货位后,通过由伸缩式直线轴承控制的货叉,夹抱式取出货物,或者将货物搬运至指定货位,完成出入库作业。穿梭车布局如图2所示。
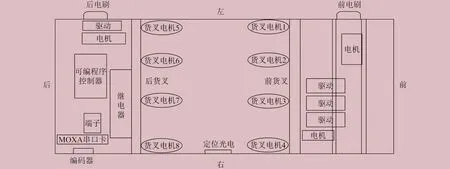
图2 穿梭车布局
2.3 提升装置系统设计
自动化立体仓储系统提升装置分为两个部分,一个用来提升储存货物、另一个是针对穿梭车换层设计。四向穿梭车只能满足水平面内的运动,无法满足上下运动要求,需要借助提升装置来满足穿梭车换层要求。穿梭车提升装置具有立即响应、快速达到、安全高效的特点。笔者开发的穿梭车提升装置动力源为三相交流电机,三相交流电机本身不能进行高精度定位操作,因此需要采用光电编码器来完成提升装置的定位工作。为了防止穿梭车超过运行区域,在提升装置的底部位置和顶部位置分别安装限位开关,以保护穿梭车安全运行。为满足穿梭车换层平稳迅速的要求,提升装置的设计要具备两个条件:① 顶端和低端的限位装置以及穿梭车位置感应器可自主运行;② 要满足提升装置的升降平台和穿梭车行走轨道在水平方向上的精度要求。
提升装置运动过程为:系统上电启动、在触摸屏上查看原点设置是否完成,完成则进行流程操作,未完成则需要在程序中进行原点设置。
提升装置运动控制分为自动控制模式和手动控制模式。设置自动控制模式时,系统检查提升装置是否处于起始层,如不在起始层,则提升装置自行运动至起始层,此时锁紧系统的挡块打开,根据控制系统发出的信号,允许穿梭车进入或退出,控制系统接收到穿梭车进入或退出信号后,在发送新的信号时挡块锁紧。设置手动控制模式时,检查挡块的状态,在触摸屏上设置提升装置运行目标。提升装置控制流程如图3所示。
3 仓储货位多目标优化
多数研究者以堆垛机进出货时间以及行驶距离为优化目标,还有从货物相关性、货物周转率、货架稳定性中选择两个作为优化目标。笔者根据企业实际生产需求,以出入库效率、货架稳定性、安全性,以及同类物品先入先出的原则作为优化目标,建立数学模型,并设计多目标遗传算法进行求解,通过分析对比,证明模型和算法的正确性。
3.1 建立数学模型
以设计的立体仓储为原型,该立体仓储主要由货物提升装置、穿梭车、穿梭车提升装置、辊筒机构组成,立体仓储的长、宽、高依次为6 m、3 m、4 m,穿梭车在立体仓储中间行驶,立体仓库的两头分别为货物提升装置和穿梭车提升装置。立体仓储共有4排、7列、5层,一共有140个货位,物品的质量不超过30 kg,数学模型涉及的符号见表1。
为了提高立体仓储货物周转率,需要把出入库频繁的货物存放在出入库平台周围的货位上,减少穿梭车在立体库中的运行时间,从而提高仓储运行效率。为了实现仓库效率最大化,构建了周转率最大化货位分配目标函数,具体表达式为:
×L×pk
(1)
式中:x为排自变量;y为列自变量;z为层自变量。

图3 提升装置控制流程
常见的货物存在一定的有效期,为了防止货物超期失效,针对同一类别的物品,采用先存放先取出的原则,从而提高货物的有效性。构建同类货物先入先出目标函数,具体表达式为:
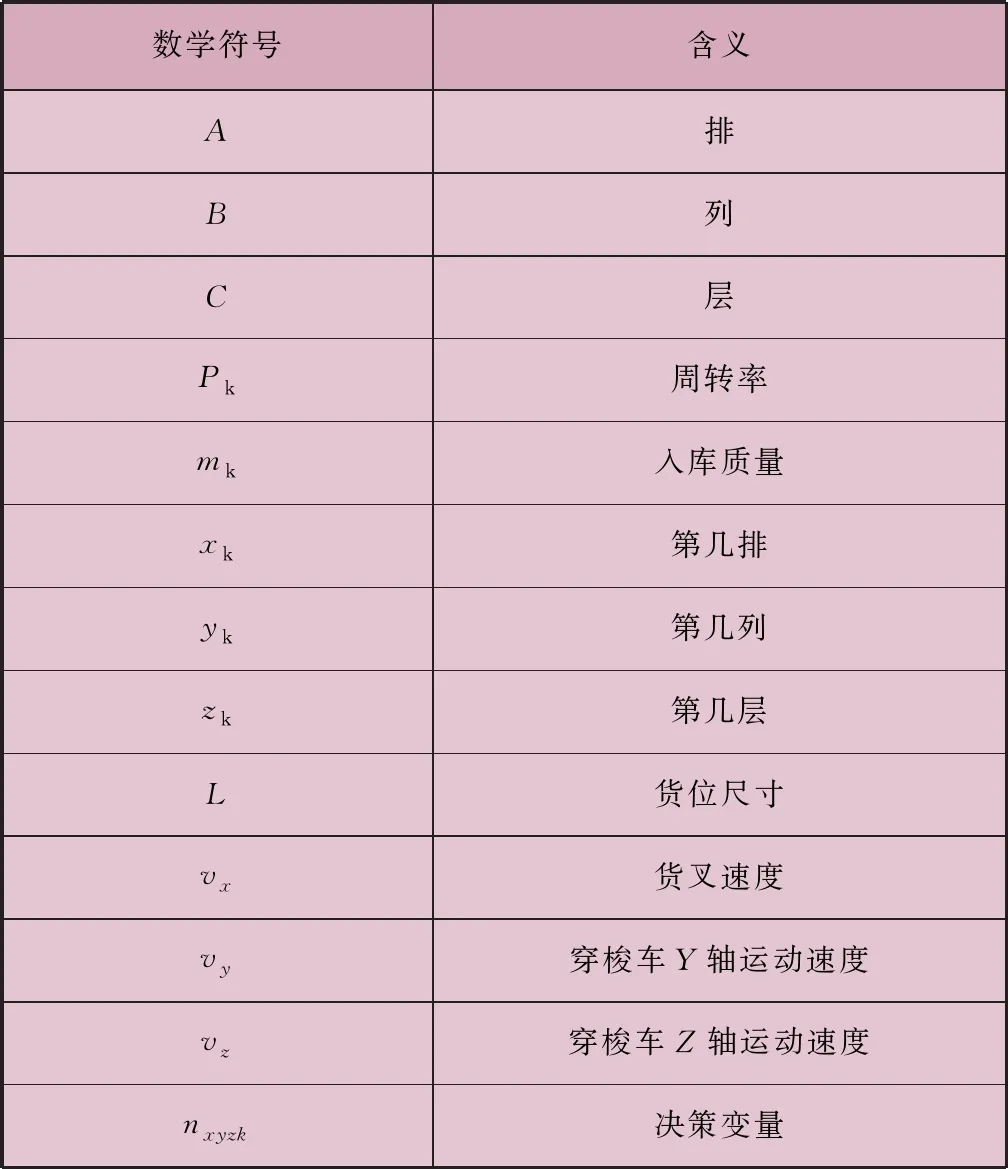
表1 仓储模型数学符号

(2)
式中:(ak,bk,ck)为对应货物的中心坐标。
立体仓储中的货架承载能力是有限的,在存放货物时必须根据货架承载能力,并遵循下重上轻的原则,这样可以降低立体仓储货架质心,提高其稳定性、安全性。与此同时,在货物存储时,为了避免重力集中而为破坏货架,不能将重物集中在某一位置。综合上述因素,建立以货物稳定性为优化目标的数学函数,为:
(3)
根据立体仓储模型,共有2排、12列、5层,因此货位优化问题空间约束条件为:

nxyzk∈{0,1}
x∈{1,2}
y∈{1,12}
z∈{1,5}
(4)
根据立体仓储运转情况,利用层次分析法,获得不同优化目标的权重。最终的立体仓库货位分配模型利用权重均衡了三个优化目标,实现了不同优化目标的均衡。建立的立体仓库优化模型为:
minf(x,y,z)=μ1×f1(x,y,z)+μ2×f2(x,y,z)
+μ3×f3(x,y,z)
(5)
式中:μ1、μ2、μ3为目标权重。
3.2 仿真计算
根据企业立体仓储实际运行状况,货叉速度为0.2 m/s,穿梭车运行速度为1.2 m/s,提升装置速度为1.5 m/s。假设一共有三类物品需要放入仓库中,并用Ⅰ、Ⅱ、Ⅲ代表这三类物品,每种货物的最大质量不能超过30 kg。Ⅰ类货物的周转率为0.5~0.6,Ⅱ类货物的周转率为0.3~0.4,Ⅲ类货物的周转率为0.1~0.2。根据企业要求,将三个目标权重分别设置为μ1=0.4,μ2=0.3,μ3=0.3。遗传算法参数设置见表2。程序在执行运算时随机生成三类货位的数量,并进行无规则排列。
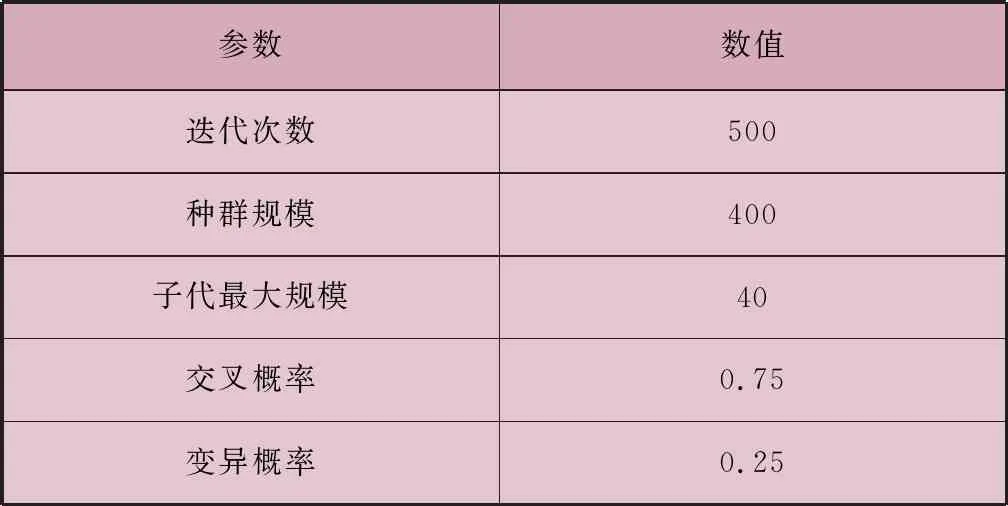
表2 遗传算法参数设置
3.3 结果分析
根据以上数据,在MATLAB软件中进行多目标求解运算,得到结果如图4~图7及表3所示。图4是在MATLAB软件中建立的仓储三维图,共4排、7列、5层。图5由程序随机生成三类七个货物,可以看到,此时货物的排列是杂乱无章没有规则的。通过表3优化前后仓储货位摆放坐标对比可知,同类物品摆放一起且靠近出口能提高运行效率,质量大的货物放在底层能提高货架的稳定性。图6是经过多目标遗传算法优化之后物品在仓储的摆放状态,可以比较直观地看出,此时同类物品摆放在一起,质量大的在底层,且图中所有货物都放置在仓储的出口处。优化目标为最小值,在计算时将适应度和优化目标正比例对应,由图7可知,适应度为一个较小值复合优化预期。

图4 仓储货位三维模型

图5 优化前货物分配

图7 求解过程
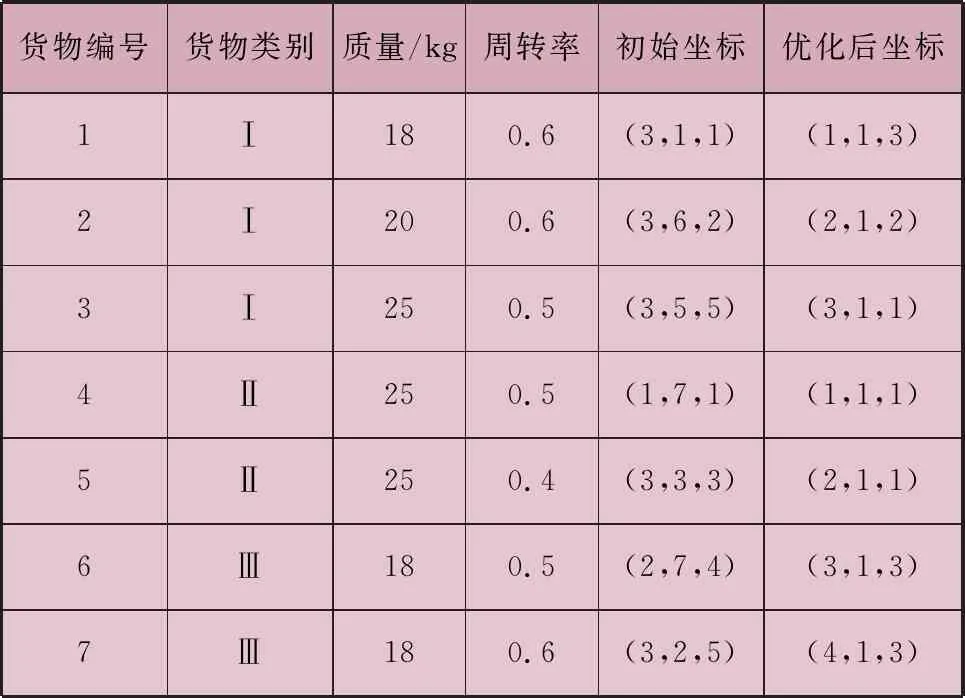
表3 优化前后货物坐标对比
4 结束语
针对企业货物存储问题,笔者设计了一套自动化立体仓储系统方案,主要包括穿梭车、提升装置及辊筒装置的电路设计、可编程控制器控制程序设计。经过运行测试,该仓储可以较好地解决货物存储问题。以仓储货架稳定性、最大运转效率、货物先进先出三个因素建立数学模型,通过多目标遗传算法进行求解。优化结果显示,同类货物放置一起且靠近出口,即满足先进先出的要求,也可以提高系统的运行效率,质量大的货物堆放在底层,从而提高了货架稳定性。
