多脉冲群组合的TACAN空/地信号仿真实现*
2022-12-30郝彦超王祥宇杨宗源文志龙李天宇李昀喆
郝彦超,侯 进,王祥宇,杨宗源,文志龙,李天宇,李昀喆
(1.西南交通大学 a.信息科学与技术学院;b.综合交通大数据应用技术国家工程实验室,成都 611756;2.西南交通大学唐山研究生院,河北 唐山 063000)
0 引 言
TACAN系统作为航空电子信息系统的关键模块,目前在各国的多种军用设备上已实现大规模推广,拥有大量机载设备用户,其中包括美国的F-16战机。TACAN系统的空/地模式可用于飞行导航,空/空模式可用于空中设备间通信,因此对TACAN导航信号进行分析有十分重要的军事价值和意义[1-2]。
TACAN导航系统分为机载设备和TACAN地面支持设备(TACAN信标)两个部分。该导航系统基于脉冲调制技术,使用了极坐标(ρ,θ)来表示设备距离和设备所在方位。其中,距离ρ通过二次雷达测距获取,设备方位角θ则是通过旋转天线所产生的多波瓣方向性图来获取。
目前,大多TACAN信号的仿真设计基于两种方法:一类如文献[1-3]中的方式,使用硬件平台实现信号的模拟,具有较高的精度,但仿真需要设计和搭建相应的硬件平台,过程相对复杂且实现要求较高;另一类如文献[4]中的方式,采用Simulink等仿真软件进行仿真设计,通过检测脉冲对的发送时刻来决定脉冲是否进行发送,虽然可以模拟固定周期内的脉冲信号,但是存在部分问题无法解决,作者使用该方式进行信号仿真时并未对TACAN信号中的随机脉冲对进行仿真实现,因此整个TACAN信号实现并不完整;同时,在加入随机脉冲对后,脉冲群间产生的脉冲重叠问题也难以解决。为了补充上述仿真方案设计的不足,同时降低TACAN信号的仿真实现的难度,本文设计了一种基于脉冲群组合的方式来实现对TACAN信号的仿真。该方式基于TANCAN信号的基本特点,分别设计了相应的脉冲群信号,并通过信号组合的方式合成了完整的TACAN信号源数据。经过信号采集设备对TACAN仿真信号的采集和多组测试数据验证,该方式产生的仿真信号数据基本符合TACAN信号的侦收要求。
TACAN信号主要包括空/地、空/空两类模式[5],由于本文仿真TACAN信号的目的是为信号侦收系统提供目标信号输入,因此主要以空/地X、空/地Y两种模式进行仿真实现。该仿真通过模拟真实环境中TACAN VOR系统下的信号特点,帮助侦收系统获取到TACAN信号源的关键方位信息。
1 TACAN信号特点
原始TACAN信号采用高斯型调制脉冲[6],同时以脉冲对的形式进行编码。根据不同脉冲对的时间间隔和脉冲发射周期,分别形成了相应的脉冲群。其中,按照规定,高斯脉冲前沿为2.5±0.5 μs,后沿为2.5±0.5 μs,宽度为3.5±0.5 μs,这些数据依赖于标准高斯型调制脉冲函数实现:

式中:参数A为高斯脉冲峰值;b=0.5;τ为脉冲半幅度值点的脉冲宽度,理想的高斯型调制脉冲结果在τ=3.5 μs时计算得出。
TACAN地面设备通常以15 Hz和135 Hz的复合调制旋转场发射脉冲,因此TACAN信号生成了15 Hz和135 Hz的脉冲包络调制信号,这些信号通常由主基准脉冲群、辅助基准脉冲群、识别脉冲对(识别信号脉冲对+均衡脉冲对)、距离应答信号及随机填充脉冲等多种脉冲构成[7],各个脉冲信号应按照上述优先次序进行发射,且需要保证在各个脉冲群发射期间不允许发射其他脉冲。TACAN信号的脉冲包络调制信号的数学表达式为

式中:f1为15 Hz;f2为135 Hz;m1、m2分别为两个脉冲包络的调制度;θ和φ分别为包络信号的初相。当设备在接收并识别出基准脉冲群后,通过计算主基准脉冲群15 Hz和135 Hz包络零点的相位差,即可得到TACAN的方位信息。在本次实验中,规定m1=0.21,m2=0.21。根据上述公式,可以得到图1所示波形图。

图1 TACAN脉冲包络调制波形图
2 TACAN信号仿真设计
根据TACAN信号脉冲群的发射优先级可知,首先需要对主基准脉冲群进行仿真设计。根据TACAN信号的信号特征,以主基准脉冲群的产生时刻作为整个TACAN信号脉冲的周期间隔,因此设计以0.066 s的信号作为TACAN信号的单个周期数据。为了仿真数据显示更加完整,以下仿真均选取了0.07 s的信号数据进行展示,数据的采样率均为51.2 MHz。
2.1 TACAN空/地X模式仿真
在TACAN空/地X模式下,TACAN信号1 s由3 600对脉冲组成。其中,900对脉冲是方位基准脉冲群(主基准脉冲群和辅助基准脉冲群),剩余的2 700对由识别信号脉冲对、距离应答脉冲及随机填充脉冲等多种脉冲构成。
空/地X模式下的主基准脉冲群格式如图2所示,主基准脉冲群的脉冲间隔(半振幅点之间测量结果)为12±0.1 μs,脉冲对间隔(半振幅点之间测量结果)为30±0.1 μs。主基准脉冲群共由12个脉冲对组成。
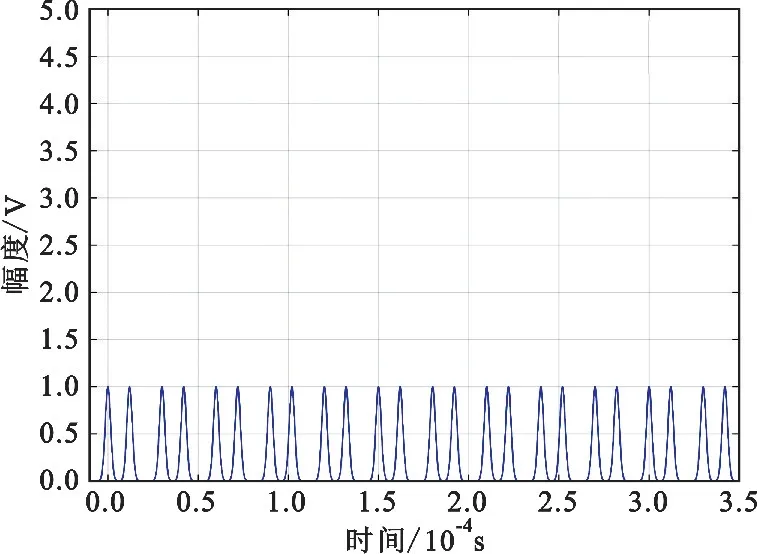
图2 空/地X模式下主基准脉冲群
空/地X模式下的辅助基准脉冲群格式如图3所示,辅助基准脉冲群的脉冲间隔(半振幅点之间测量结果)为12±0.1 μs,脉冲对间隔(半振幅点之间测量结果)为24±0.1 μs。辅助基准脉冲群共由6个脉冲对组成,一个周期内共有8组辅助脉冲群。
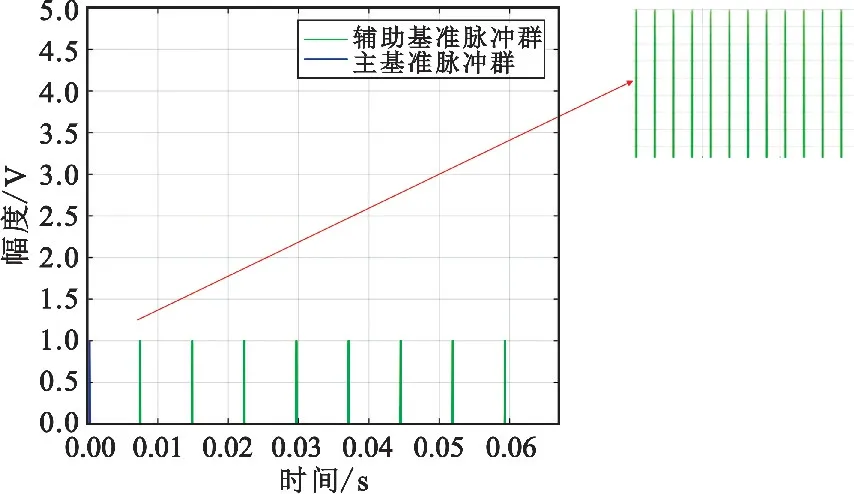
图3 空/地X模式下主基准脉冲群+辅基准脉冲群
空/地X模式下的识别信号脉冲对格式如图4所示,识别信号脉冲对在该模式下的脉冲间隔为(半振幅点之间测量结果)12±0.1 μs,脉冲对间隔(半振幅点之间测量结果)为740.7 μs,在每一组识别信号脉冲对后100±10 μs处还应包含一组相同的均衡脉冲对。

图4 空/地X模式下主基准脉冲群+辅基准脉冲群+识别信号均衡脉冲对(识别信号脉冲对+均衡脉冲对)
识别信号信息由摩尔斯码在上述脉冲群取样生成,该 信 息 时 长 不 超 过5 s,重 复 周 期 为37.5±3.75 s[8-9]。
距离应答脉冲在空/地X模式下的脉冲格式与空/地X模式下主基准脉冲群的脉冲格式相同,在空/地X模式下,它的脉冲间隔为12±0.1 μs,由于本文仅涉及到TACAN信号的侦收,因此对应答信号不做处理。
随机填充脉冲在空/地X模式下的脉冲格式如图5所示,其脉冲间隔为12±0.1 μs,且在不能与其他脉冲冲突的前提下需要满足相应的分布规律[10],当询问脉冲数增加时需要自动减少随机填充信号以保持TACAN信号的恒定工作比。

图5 空/地X模式下主基准脉冲群+辅基准脉冲群+识别信号均衡脉冲对(识别信号脉冲对+均衡脉冲对)+随机填充脉冲对
为保证随机填充脉冲与上述已经存在的其他脉冲信号不发生重叠,选择以下方式实现:在进行随机填充脉冲设计时,根据记录中已有的脉冲发射时间进行判断,当产生随机脉冲时,需要判断该时刻是否已经产生其他脉冲群,如果当前时刻已经存在其他脉冲群,则选择不发射随机填充脉冲;否则,根据分布规律进行随机发射。完成随机填充脉冲发射后,最终得到了完整的TACAN信号。
2.2 TACAN空/地Y模式仿真
空/地Y模式和空/地X模式最主要的区别在于主基准脉冲群和辅助基准脉冲群的组成不同。对于空/地Y模式来说,主基准脉冲群仅由多个单脉冲构成,与空/地X模式下的主基准脉冲群相比数量更少,结构更加简单。单个周期内辅助基准脉冲群的数量虽然与空/地X模式下一致,但是脉冲群中的组成也由脉冲对转化为了多个单脉冲。因此对于空/地Y模式,仅需改变主基准脉冲群和辅助基准脉冲群即可。
在空/地Y模式下,TACAN信号1 s由7 155个脉冲组成。其中,1 755个是方位基准脉冲群(主基准脉冲群和辅助基准脉冲群),剩余的2 700对由识别信号脉冲对、距离应答脉冲及随机填充脉冲等多种脉冲构成。
在空/地Y模式下的主基准脉冲群格式如图6所示,主基准脉冲间隔(半振幅点之间测量结果)为30±0.1 μs,共由13个单脉冲组成。

图6 空/地Y模式下主基准脉冲群
空/地Y模式下的辅助基准脉冲群格式如图7所示,脉冲间隔(半振幅点之间测量结果)为15±0.1 μs,共由13个单脉冲组成,一个周期内共有8组辅助脉冲群。
空/地Y模式下的识别信号脉冲对、随机填充脉冲对与空/地X模式相同。识别信号脉冲对填充完成后的格式与图4一致,随机信号脉冲填充后的格式与图5一致。
2.3 TACAN仿真信号的调制
经过上述操作,已经获得了TACAN空/地X模式和Y模式下原始基带信号数据。将TACAN基带信号s(w)与公式(2)进行点乘处理,就可以得到相应的脉冲波形。最终的TACAN信号调制的数学表示如下:

根据公式可得最终TACAN调制信号波形如图8所示(此处仅提供了空/地X模式下脉冲包络调制波形,空/地Y模式下脉冲包络调制波形与空/地X模式下脉冲包络调制波形相类似)。

图8 TACAN空/地X模式下脉冲包络调制波形图
2.4 TACAN仿真信号验证
在获得上述TACAN调制信号后,将其保存为IQ基带数据,并通过RS(ROHDE&SCHWARZ)公司的SMW200A设备作为信号源,将该仿真数据进行发射,同时使用信号采集设备对该信号进行采集。
通过信号采集设备获取TACAN仿真信号之后,采用如下流程对信号进行识别,如图9所示。IQ数据输入程序后,首先通过包络检波算法获取到TACAN基带信号。 得到TACAN基带信号后,通过TACAN信号类型检测算法获取更加详细的信号特征[11-13],信号特征主要包括脉冲幅度、脉冲宽度、脉冲到达时间及脉冲群的脉冲个数。由TACAN信号的特征可知,在360 μs的时间间隔内出现12对高斯脉冲且当脉冲对间隔为30 μs时,可以判断该信号为空/地X模式下的主基准脉冲群;在144 μs的时间间隔内出现6对高斯脉冲且脉冲对间隔为24 μs时,可以判断该信号为空/地X模式下的辅基准脉冲群。同时需要统计在一个时间周期内(主脉冲群只出现一次的时间间隔)辅基准脉冲群的数量是否为8个,满足上述条件,基本可以判定该信号为空/地X模式下的TACAN信号。同理,在390 μs的时间间隔内出现13个单高斯脉冲且脉冲间隔为30 μs时,可以判断该信号为空/地Y模式的主基准脉冲群;在144 μs的时间间隔内出现13个单高斯脉冲且脉冲对间隔为15 μs时,可以判断该信号为空/地Y模式下的辅基准脉冲群。同样也需要统计在一个时间周期内辅基准脉冲群的数量是否为8个,满足这些条件,基本可以判定该信号为空/地Y模式下的TACAN信号。

图9 TACAN信号识别流程图
根据时长划分了不同数据长度,均以0.07 s为周期,统计了在不同时间长度下不同仿真类型数据的识别结果,如表1所示。根据结果可知,仿真数据的仿真类型与识别类型完全一致。
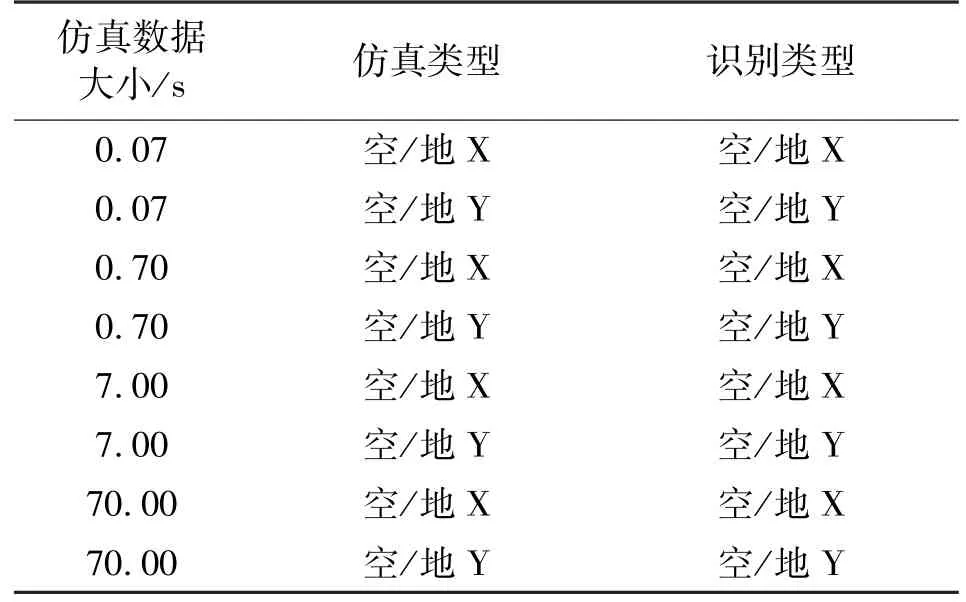
表1 TACAN仿真信号验证结果
本文中基于多脉冲群组合算法的仿真结果与使用Simulink等仿真软件在加入随机脉冲信号后的仿真结果对比如图10所示。从图中可以看出,使用多脉冲群组合算法生成的主基准脉冲群信号中并未出现随机填充脉冲,而使用Simulink等仿真软件在加入随机脉冲信号后,主基准脉冲群信号中混杂了部分随机脉冲信号。
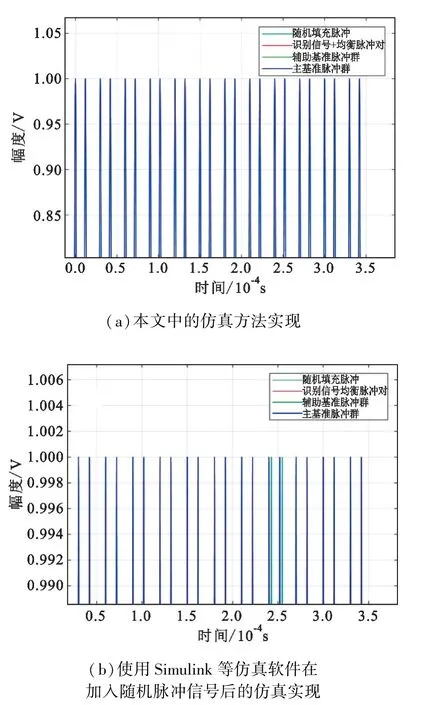
图10 TACAN信号仿真对比图
3 结束语
本文主要以TACAN信号的侦收为出发点,设计了TACAN空/地X模式和空/地Y模式两类信号的仿真。该仿真将原始信号通过拆分成几种不同的脉冲群分别进行仿真设计,最终通过多脉冲群组合的方式进行了完整的仿真实现。之后,借助RS公司的SMW200A设备作为信号源,对仿真数据进行了发射,并使用某公司提供的信号采集设备对TACAN信号进行采集,最终通过相应的识别算法实现两类信号的判断及信号参数获取。
经过对采集信号的验证可知,基于多脉冲群组合的TACAN侦收信号仿真方法满足该信号的侦收要求,基本还原了真实场景中TACAN空/地模式下的信号特征。在后续的工作中,将针对TACAN空/空模式下的仿真实现进行研究。
