基于RLS的二次加权相关时延估计算法*
2022-12-30倪淑燕廖育荣
徐 菁,倪淑燕,廖育荣
(航天工程大学 a.研究生学院;b.电子与光学工程系,北京 101400)
0 引 言
时延估计在测向定位领域有着重要的应用[1]。时延估计主要的方法有两类:基于相关的时延估计算法[2-3]和自适应时延估计算[4-5]。由于基于相关的时延估计算法运算量小、容易实现,所以得到了广泛的应用。
广义互相关算法[6-8]在基本互相关算法基础上,通过引入Roth、SCOT、PHAT等加权函数,使相关谱峰更加尖锐,提高了时延估计精度。文献[9]将SCOT加权函数和PHAT加权函数结合,联合两种加权函数估计时延。在信噪比高时广义互相关算法可以获得很好的时延估计性能,但在低信噪比(0 dB以下)条件下,该方法性能恶化严重。为了提高低信噪比下时延估计的精度,研究者们提出了自适应时延估计算法、二次相关时延估计算法等[10]。自适应时延估计一般采用最小均方误差(Minimum Mean Square Error,LMS)算法,而基于LMS的自适应时延估计算法在收敛速度和稳定性之间存在矛盾,如文献[11]牺牲收敛速度来改善稳定性。但通过调节步长兼顾两者时,文献[12]只是验证了理论的正确性,并未深入探讨。文献[13-14]只考虑了高信噪比环境,也未对低信噪比环境进一步分析。除此之外,二次相关也出现了很多改进算法,如文献[15-16]在引入窗函数的基础上,利用希尔伯特插值法提高了时延估计的精度和稳定性;文献[17]将二次相关与广义互相关结合,文献[18]还引入了最小二乘拟合;文献[19]结合了相关峰精细插值和希尔伯特变换等。虽然这些算法有效地抑制了噪声的影响,但时延估计的性能仍有待提高。
为了进一步提高低信噪比下的时延估计性能,本文分别对两路接收信号进行RLS自适应滤波,提高接收信号的信噪比,然后引入加权函数,并利用二次相关法更准确地估计时延。
1 相关法时延估计基本理论
1.1 广义互相关法时延估计原理
假设两路接收信号的数学模型如下:

式中:s(t)为输入信号,d为接收信号x1(t)和x2(t)的时延;n1(t)和n2(t)分别为接收信号x1(t)和x2(t)的噪声。
两路接收信号的互相关函数可以表示为
假设n1(t)和n2(t)均为服从零均值、与信号相互独立的高斯噪声,则式(2)中Rsn2(τ)、Rn1s(τ-d)和Rn1n2(τ)都为零,即

根据相关函数的性质可知,当τ=d时,互相关函数取最大值。因此,只要找出互相关函数最大值的位置τ,即为两路接收信号的时延差。
广义互相关法是在基本互相关法的基础上,引入加权函数,以降低噪声的影响[20]。它是在频域进行的,对互功率谱进行加权后再反变换到时域,得到广义互相关函数,即

1.2 广义二次相关时延估计
二次相关法主要通过自相关运算提高信噪比,从而改善时延估计的性能。在对两路接收信号进行互相关得到R12(τ)的同时,对其中一路接收信号x1(t)进行自相关得到R11(τ),之后再对R12(τ)和R11(τ)进行互相关[21]。其中,第一路接收信号的自相关函数为

因为n1(t)为服从零均值、与信号相互独立的高斯噪声,所以式(5)进一步化简为

与式(2)结合,得到二次相关函数:
当τ=d时,二次互相关函数为最大值,即估计的时延。广义二次相关算法主要是计算傅里叶变换后两路接收信号的自功率谱和互功率谱,将加权函数与互功率谱相结合,并与自功率谱进行结合得到二次互功率谱;再进行傅里叶反变换得到广义二次相关函数;最后对互相关函数的谱图进行峰值检测,得到估计的时延。
2 基于RLS的二次加权相关时延估计
2.1 算法结构设计
为了进一步提高低信噪比条件下的时延估计性能,本文在广义二次相关法的基础上进一步改进,设计了基于RLS的二次加权相关时延估计算法。首先利用RLS自适应滤波降低噪声影响,之后在二次相关时引入二次加权函数,提高算法在低信噪比的估计精度。该算法结构框图如图1所示,其中()*表示取共轭。
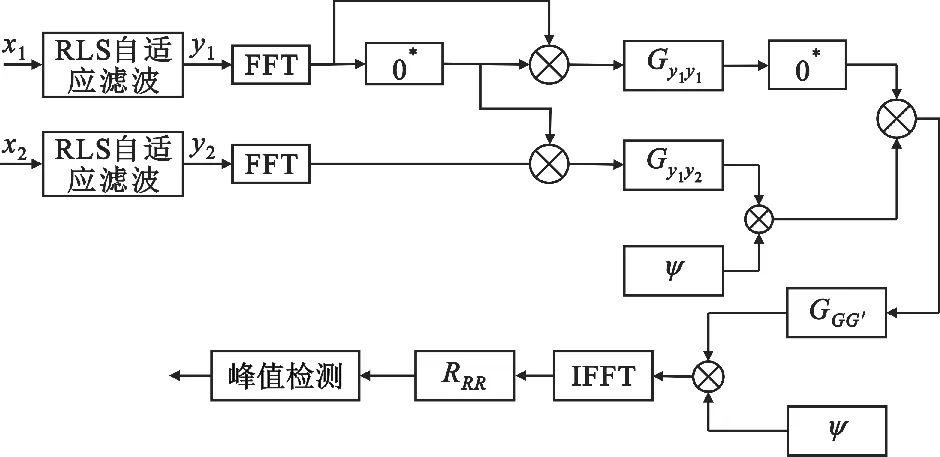
图1 基于RLS的二次加权相关时延估计算法结构
根据图1,该算法的步骤如下:
Step1进行预滤波处理,利用RLS自适应滤波算法对两路接收信号x1和x2进行滤波,得到滤波信号y1和y2,提高抗噪性。
Step2计算第一路接收信号的自功率谱Gy1y1和两路接收信号的互功率谱Gy1y2,对互功率谱Gy1y2加权得到G'y1y2。
Step3将Gy1y1和G'y1y2进行二次相关得到GGG',并引入加权函数,得到G'GG'。
Step4最后进行傅里叶反变换得到RRR,并进行峰值检测估计出时延。
2.2 RLS滤波过程
RLS算法进行滤波的基本原理是利用当前时刻得到的参数,在已获得前一时刻滤波器权向量的最小二乘估计权值的情况下进行迭代,计算出当前时刻滤波器权向量的最小二乘估计权值[22]。
RLS滤波算法的代价函数为

对上式进行求导,可得权值的迭代方程为

式中:w(n)为第n次迭代的权值;k(n)为n时刻的增量;e(n)为预测误差,其表达式为

式中:d(n)为参考信号,也可以称为期望信号;y(n)为输出信号。实际上,选择期望信号有两种方式:第一种方式是将经过延迟的输入信号作为期望信号;第二种方式是将需要估计的信号作为期望信号,即d(n)=x(n)=s(n)+v1(n),噪声v2(n)作为自适应滤波器的输入信号,其中v2(n)与v1(n)相关,与s(n)无关。结合本文的算法,这里选择第二种方式作为自适应滤波中的期望信号。
增量的表达式为

式中:λ为遗忘因子,且是小于等于1的正数;g(n)=T(n-1)x(n),相关矩阵T(n)按照下式迭代:

2.3 二次加权的互相关函数设计
进行RLS自适应滤波之后,两路接收信号开始二次相关。在第一次进行互相关时,参照广义互相关中的ROTH加权函数进行加权,加权函数如下:

结合上式,可得第一次加权互相关函数为

第一次互相关进行加权后,与第一路接收信号的自相关进行第二次互相关可以得到GRR。然后进行第二次加权,同样参照广义互相关中的ROTH加权函数进行加权,加权函数如下:

结合上式,可得第二次加权互相关函数为

2.4 复杂度分析
根据2.2节RLS滤波算法部分的分析,RLS滤波进行一次迭代需要3L2+3L+1次乘法、2L2+2L次加法以及1次除法,因此可得在RLS滤波的过程中所需的计算量为O(L2)。在进行傅里叶变换时,需要L/2×lbL次乘法,L×lbL次加法,所以需要的计算量为O(L×lbL),计算功率谱函数和进行加权时所需的计算量为O(L2)。由此,可以得到该算法所需的计算量为O(L2)。
3 仿真与分析
结合上述的信号模型,给出以下的仿真条件:采样频率为8 kHz;信号是幅度为8、频率为1.5 kHz的余弦信号;RLS滤波器的阶数为32;权向量的初始值为0;相关矩阵的初始值为10;两路接收信号间的时延为1.9 ms。下面利用广义互相关法、广义二次相关法和基于RLS的二次加权相关法在不同信噪比下进行时延估计。
信噪比为5 dB时,利用三种算法进行时延估计,仿真结果如图2所示。
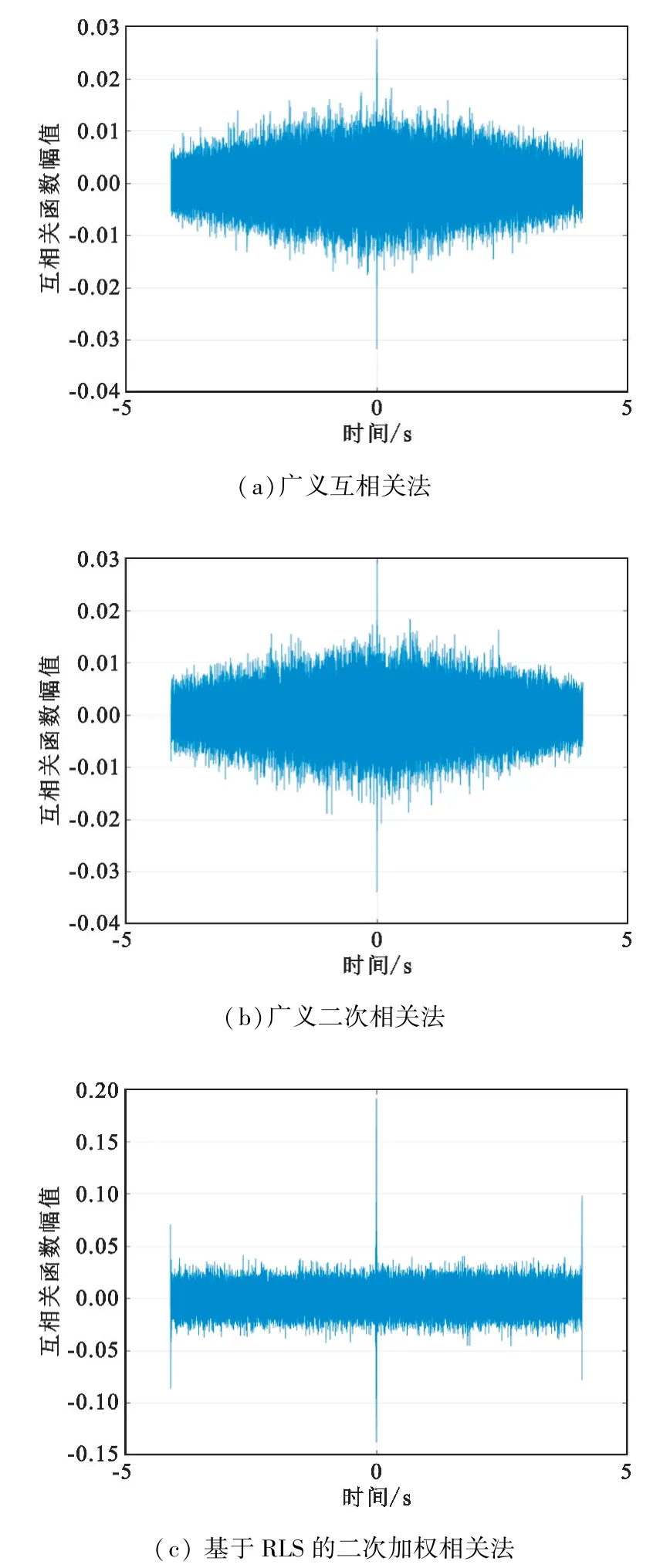
图2 SNR=5 dB的三种算法仿真图
在0 dB时,利用三种算法进行时延估计,仿真结果如图3所示。
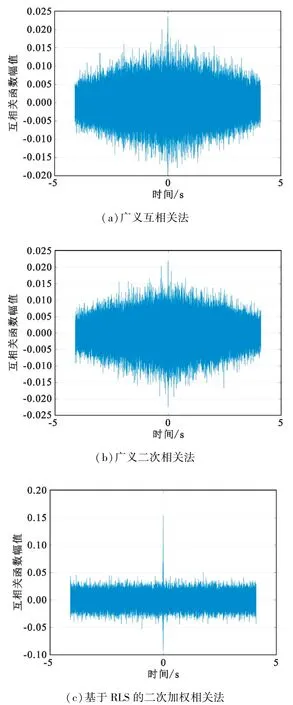
图3 SNR=0 dB的三种算法仿真图
在-5 dB时,利用三种算法估计时延,仿真结果如图4所示。不同信噪比下,利用三种算法估计的误差如表1所示。观察图2~4和表1可以发现,当信噪比较高时,三种时延估计算法的精度都较高;信噪比降低时,广义互相关法和广义二次相关法的性能急剧下降,次峰与主峰相差不大,甚至淹没了主峰,导致估计的精度差。而新算法将RLS自适应滤波算法和二次相关法结合,并引入加权函数,锐化了互相关函数的谱峰,减小了次峰的波动。与前两种相比,该方法能更准确地估计时延,抑制噪声的影响。
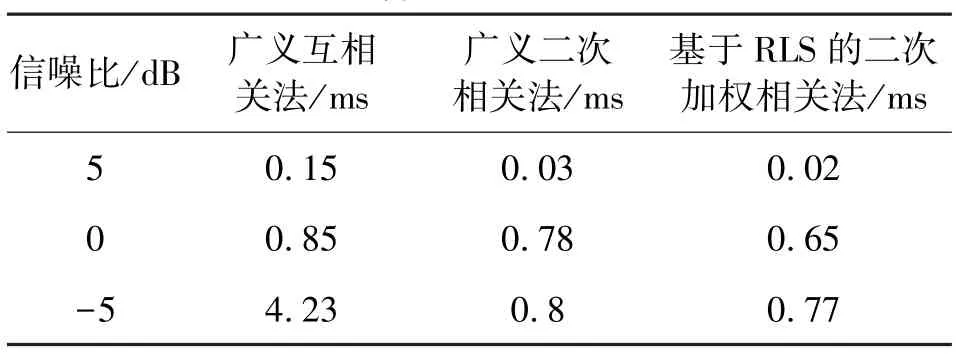
表1 三种算法时延估计误差对比

图4 SNR=-5 dB的三种算法仿真图
为了进一步分析三种算法的性能,在信噪比为-10~10 dB时进行蒙特卡洛实验,得出三种算法实验估计的均方误差如图5所示。从图中可以看出,广义互相关法的稳定性最差,广义二次相关法次之,基于RLS的二次加权相关法最好。在信噪比较高时,广义互相关法、广义二次相关法和基于RLS的二次相关法的估计的误差都比较小;随着信噪比的降低,广义互相关法的性能下降最严重,广义二次相关的性能也有所下降,而基于RLS的二次加权相关法仍保持着良好的估计性能。

图5 三种算法的均方误差比较
4 结 论
本文提出了一种基于RLS的二次加权相关时延估计算法,避免了在低信噪比环境下时延估计算法性能差的缺点。实验结果表明,与广义互相关法和广义二次相关法相比,该算法估计时延的性能更好,谱峰更加尖锐,而且提高了抗噪性和估计性能。
