基于相对速度障碍的开阔水域避碰方法
2022-12-29刘进来
刘进来 李 磊
(武汉理工大学,湖北武汉 430063)
船舶碰撞事故是对水上交通安全威胁最大的事故类型之一,这已成为相关行业和领域内的共识[1]。因此对避碰方法的相关研究也就显得尤为重要。传统避碰方法[2]-[3][4]大多根据《避碰规则》,依靠雷达等设备的计算能力,在已知DCPA(distance to closest point of approach)和TCPA(time to closest point of approach)的基础上,由驾驶员做出判断采取避碰行动。文献[3]更是提出了建立船舶避碰系统专家库。上述方法经过多年的实践积累和提升,确实有良好的实用性,但也有一定的不足。首先,传统避碰方法较大地依赖船舶驾驶人员的技术和经验,而避碰系统专家库则无法将所有的会遇局面和态势都囊括其中。另外,DCPA和TCPA的量纲并不相同,根据这两个量来判断碰撞危险也多有不便。因此,借鉴文献[5]的研究成果,采用碰撞危险度的概念来对会遇局面和会遇态势做出识别。在此基础上对于不同的会遇局面采用不同的船舶领域,采用相对速度障碍方法计算出本船的可行航向区间集合A,再针对特殊目标计算出本船的可行航向区间集合B,A与B的交集即是本船的最终可行航向区间。根据会遇态势和会遇局面计算出符合《避碰规则》和良好船艺的最小改向角进行改向。自改向完成时刻起即开始计算恢复原航向时机,直到找到恢复原航向后所有目标船和特殊障碍物都不会进入我船船舶领域的最早时刻点,该时刻点即为复航时机。直到本船恢复原航向,本次避碰过程结束。
1 相对速度障碍模型
1.1 研究环境条件
水路运输按船舶航行区域分有远洋、沿海和内河运输,三类区域各有其环境特点,适宜远洋航行船舶往往船型尺度较大,航线以国际运输为主,大部分时间航行于船舶密度较小、天气较好的开阔水域。本文所指的开阔水域是指沿海运输和远洋运输中,水域环境开阔、航行障碍物较少的水域。这类区域由于水域开阔,船舶密度相对较小,风浪流对船舶避让的影响相对较小。限定的环境条件:场景为一艘以海上速度正常航行机动船(简称本船)航行于开阔水域中,助航仪器探测范围内有多艘机动船(含义按《避碰规则》定义,均简称目标船)航行,同时有特殊目标。水域环境为良好天气,风浪流不对船舶避让和船舶运动模型产生影响。
1.2 坐标系
文中采用大地坐标系和随船坐标系,如图1所示,大地固定坐标系XOY,Y 、X 轴正向分别指向地理北极、正东。随船移动坐标系XOY,原点为本船重心,x、y轴正向指向右舷、船首,方向与XOY 坐标系一致,本船航向向右变化(增加)为正。本船看目标船舷角Q 为本船船首线向右到目标船方位线的夹角,本船看目标真方位TB为本船正北线向右到目标方位线的夹角。TC与TB、Q的关系为(1)式:

图1 坐标系

计算中需将xoy中计算的坐标转换成XOY中的坐标,转换方法为(2)式:

1.3 速度障碍
速度障碍理论最初是由PAOLO FIORINI[6]提出的,其含义是在自身和目标维持当前的运动状态的前提下,自身将会与移动目标和其他障碍物发生碰撞的速度矢量的并集,即自身会进入目标和其他障碍物的一定领域之内的速度矢量的并集。近年来国内外对于速度障碍的研究日趋增多。熊勇[7]等建立了多船避碰的控制方法,但方法中尚未将特殊障碍物考虑在内。马杰[8]等采用速度障碍和人工势场理论构建了受限水域的船舶避碰决策方法,但在本船改向后的复航时机未作探讨。在国外相关研究中,文献[9]采用垂直椭圆速度障碍建立了移动机器人的避碰方法。航海相关领域的研究中,文献[10]基于修正的速度障碍法,引入多级优化决策模型,并考虑船舶操纵性、多船、偏离航向和良好船艺等各种约束。然后进一步分析了其他船舶在避碰过程中所采取的交互行动,并在电子海图上完成了相关的案例研究。
图2中A,B代表本船和目标船,以B为圆心的区域代表了目标船周围的一定范围区域,是基于目标船重心的船舶领域。一旦本船进入该区域,就认为两船碰撞。AB1、AB2分别是由本船中心为起点,并与该圆形区域相切的射线。在t时刻,vA、vB分别是此时两船的真速度向量,vAB是A相对于B的相对速度,而LAB则是本船相对于目标船的相对运动线。如B是静态目标,vB=0,如果vA的方向落入到∠B1AB2的范围,则A将会与B发生碰撞;如B是移动目标,则vB≠0,如果vAB的方向落入到∠B1AB2区域,则碰撞将发生。速度障碍区:A相对于B的速度障碍区CAB为以A为顶点的一扇形区域,当两船A相对于B的相对速度以A为起点并指向区域内任意一点时,A相对于B的相对运动线将和B相交(碰撞发生)。在图2中,速度障碍区就是三角形区域∠B1AB2。
图2 速度障碍
1.4 相对速度障碍
考虑到航海实践中船舶驾驶人员往往对本船的相关数据和操纵性能更为熟悉,因此采用相对速度障碍,即基于本船船舶领域,在本船只改变速度方向不改变速度大小的前提下,求出所有目标和障碍物相对于本船的速度,考察所有目标和障碍物会进入本船船舶领域的合集,则其补集即本船的可行航向区间。在图 3 中,我船初始速度为V0,目标船初始速度为V1,目标船对本船的相对速度为VR,若目标船和本船均保向保速,则其一定会进入我船船舶领域。若我船改向至V0',则目标船对我船的相对速度变为VR',其相对运动线恰好与我船船舶领域相切;同理,若我船改向至V0'',则目标船对我船的相对速度变为VR",其相对运动线也恰好与我船船舶领域相切。那么如果我船的航向属于V0'、V0''和原点O组成的锐角内,则目标船一定会进入我船船舶领域,相应地,不在此区间内的速度矢量集合即为我船的可行航向区间。
图3 基于本船船舶领域的相对速度障碍
2 船舶领域模型
借鉴已有研究成果[11],对于不同会与局面的目标船和障碍物,采取不同的船舶领域。对遇局面和追越局面均采用椭圆偏心领域,不过偏心位置有所不同;交叉相遇局面采用圆形偏心领域;而对特殊障碍物则采用本船位于船舶领域中心的椭圆领域。船舶领域相关方面的研究已经十分成熟,在此只对文中所采用的船舶领域模型做简单介绍。
图4(a)中,对遇局面采用的船舶领域模型,a、b分别为椭圆短半轴和长半轴长度,L为船长,R为椭圆中心沿本船真实位置到椭圆边界的距离,本船真实位置从椭圆中心向左后方199°偏移R/4。在以虚拟船中心为坐标原点,虚拟船船首方向为纵轴y轴正向,右正横方向为x轴正向的坐标系中,椭圆边界的方程为:
图4 不同局面下的船舶领域

对于从虚拟船(椭圆中心)看椭圆边界上舷角为Q的任意一点,设椭圆中心到该点的距离为RT,则在xoy中有:

将(4)式代入(3)式可得:

令Q=199°则:

若已知虚拟船在xoy的位置(x0,y0)和航向C0可对椭圆上任意一点在XOY 中的坐标按照(5)式求解:

3 船舶运动数学模型与航向控制模型
3.1 MMG模型
针对船舶运动数学模型的研究不胜枚举,为便于船舶数据的获取,采用较常用的分离式MMG(maneuvering model group)模型对本船的位置和航向数据作推算。下面简要介绍三自由度MMG模型。
(8)式中,xH与yH为船体在相应的横向,纵向和首摇方向上力和力矩;下标为H、P和R的变量分别为船体、螺旋桨和舵的力和力矩;mx和my分别为横向,纵向船舶附加质量;IZZ和JZZ分别首摇转动惯量和附加转动惯量;u、v及r分别是沿x轴速度,y轴速度及首摇转动速度。du/dt、dv/dt及dr/dt分别是沿x轴加速度,y轴加速度及首摇角加速度。该方程中的各种力和力矩、船体参数的使用以及线性水动力导数和非线性水动力导数的计算参照文献[12]。采用龙格库塔法[13]解该方程后即可推算出下一时刻船舶的位置航向等信息。
3.2 航向控制模型
为了较真实地反映船舶转向的非线性过程,传统的速度矢量推算方法无法满足这一要求。目前船舶航向控制方法的相关研究已经很成熟且不乏创新,如文献[14]中将神经网络应用于船舶航向控制,可以使海况干扰得到有效控制,进一步提升航向控制效果。文献[15]中在二阶K-T模型中加入迭代和自抗扰滑模控制,对外部干扰进行估计和补偿,使得航向控制更接近航行的实际情况。考虑到技术的实用性和成熟型,依然采用最常用的PID航向控制模型。
将MMG 模型和PID 控制结合起来就可以对本船转向的非线性过程进行刻画。下面简要介绍PID航向控制原理。
采用增量式PID 航向控制器。PID 航向控制器是根据实际航向和设定航向形成代数偏差,将偏差比例(Proportion)、积分(Integral)和微分(Differential)增益的3 个过程,将其线性组合后输出舵角,通过限幅环节将舵角控制在[-35°,35°],来控制船舶的航向。其原理图如图5所示。
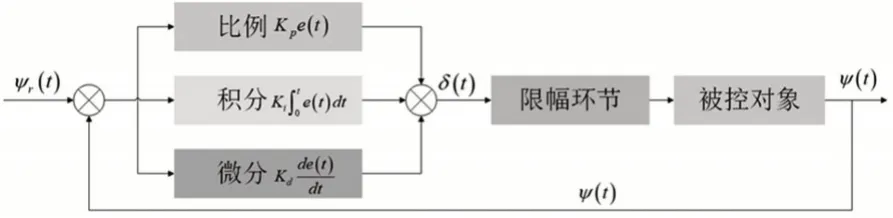
图5 PID航向自动舵原理图
舵角控制率为:

在进行计算机仿真时,需对式(9)中的积分项和微分项进行离散化处理,以一系列的采样时刻点KTP(K为采样序列号,TP为采样周期,在此取1s)代替时间t,用和式代替积分,用增量代替微分,近似替代后有:
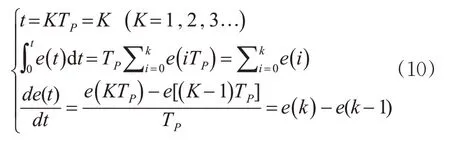
将式(10)代入式(9)得:

式(11)中,KP称为比例系数,Ki=Kp/Ti称为积分系数,Kd=KP·Ti称为微分系数。对式(11)进行递推有:

用式(11)减去式(12)即得增量式PID控制表达式:

文中KP、Ki、Kd分别取1200、75、0.74。
4 避碰方法
借鉴文献[5]的相关研究成果,设置最终碰撞危险度CRI(collision risk index),其包括时间碰撞危险度TCRI(time collision rick index)和空间碰撞危险度SCRI(space collision risk index),在数值上最终碰撞危险度为时间碰撞危险都和空间碰撞危险度的乘积,只有当两者都不为零时,最终碰撞危险度才存在。
4.1 空间碰撞危险度
结合《避碰规则》的要求,若目标船最终会进入我船船舶领域,即存在最终碰撞危险,那么空间碰撞危险度存在且等于1;若目标船最终不会进入我船领域,即不存在最终碰撞危险,那么空间碰撞危险度为0,即空间碰撞危险度只有1和0两个取值。
4.2 时间碰撞危险度
在求取时间碰撞危险度之前需要先求出紧迫局面时间TCS(time to close quarter situation),即当前时间点距紧迫局面形成点的时间。紧迫局面在《避碰规则》中没有做出明确的定义,但我国航运界普遍认为其是指致有碰撞危险的两船相互接近到单凭一船的行动已不能在安全距离上驶过的局面。结合船舶领域模型,可以将其量化为我船在某一时刻进行最有效的转向行动,目标船的运动轨迹恰好与我船的船舶领域相切,我船若晚于这一时间点转向,则目标船一定会进入我船船舶领域。从当前时刻到这一时间点的时间就称为紧迫局面时间。紧迫局面时间需要根据不同的会遇局面进行求取,在此只列举对遇局面的紧迫局面局面时间计算方法(如图6),其余会遇局面紧迫局面时间的求取方法类似。

图6 对遇局面TCS计算方法
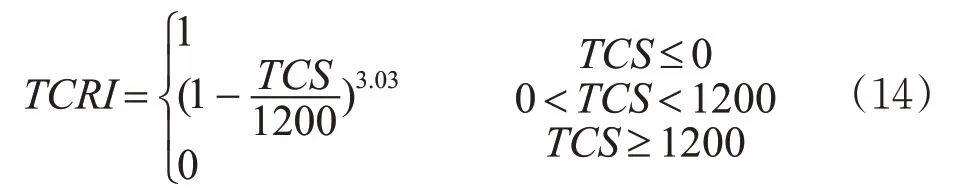
在此基础上用(14)式对时间碰撞危险度的计算方法予以定义:
4.3 可行航向区间计算
4.3.1 对于目标船的可行航向区间
对于不同会遇局面的目标船,我船应采用的船舶领域有所不同,可行改向区间的计算方法虽略有差异,但也是大同小异,在此只介绍对遇局面目标船的可行航向区间求取。
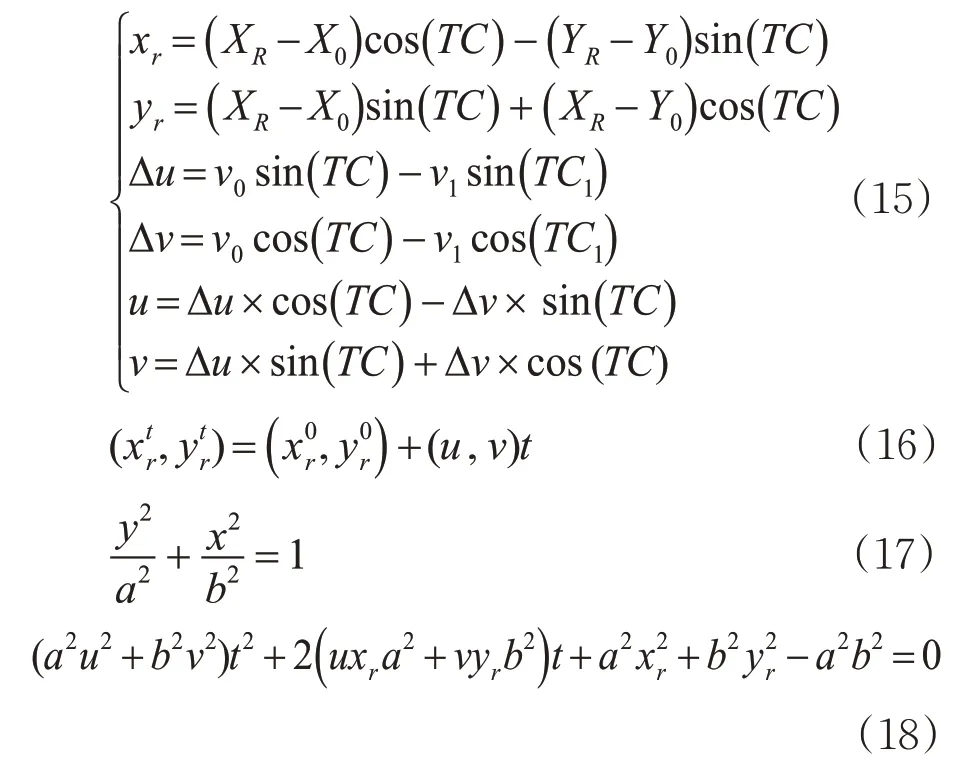
在求取可行航向区间时,首先将一个圆周离散化为以一度为间隔的集合即[-179°,180°],计算可行改向区间以一度为间隔实际上也是符合航海实践的。为简化计算,依然借鉴文献[5]所采用的方法,首先建立以我船位置为原点,我船右正横方向为x轴正方向,我船船首方向为y轴正方向。将目标船在大地坐标系下的相关参数转换为本船随船坐标系下的参数,具体计算方法为(7)式。在此基础上,目标船在t 时刻的位置可由(15)式求得,(15)式中,XR、YR是目标船在大地坐标系下的坐标,X0、Y0分别是本船虚拟位置在大地坐标系下的横纵坐标,xr、yr分别是目标船在本船随船坐标系下的横纵坐标,u、v分别是目标船在随船坐标系下的横向速度和纵向速度。对遇局面我船采用的船舶领域为偏心椭圆船舶领域,其随船坐标系下的方程为(17)式。将(16)式代入(17)式并化简即可得到(18)式。显然(18)式是一个一元二次方程,若目标船运动轨迹与我船船舶领域有交点,则该方程必然有正根。令A=(a2u2+b2v2) ,B=2(uxra2+vyrb2),C=a2x2r+b2y2r-a2b2。
对遇局面本船可行航向区间的计算步骤为图7。
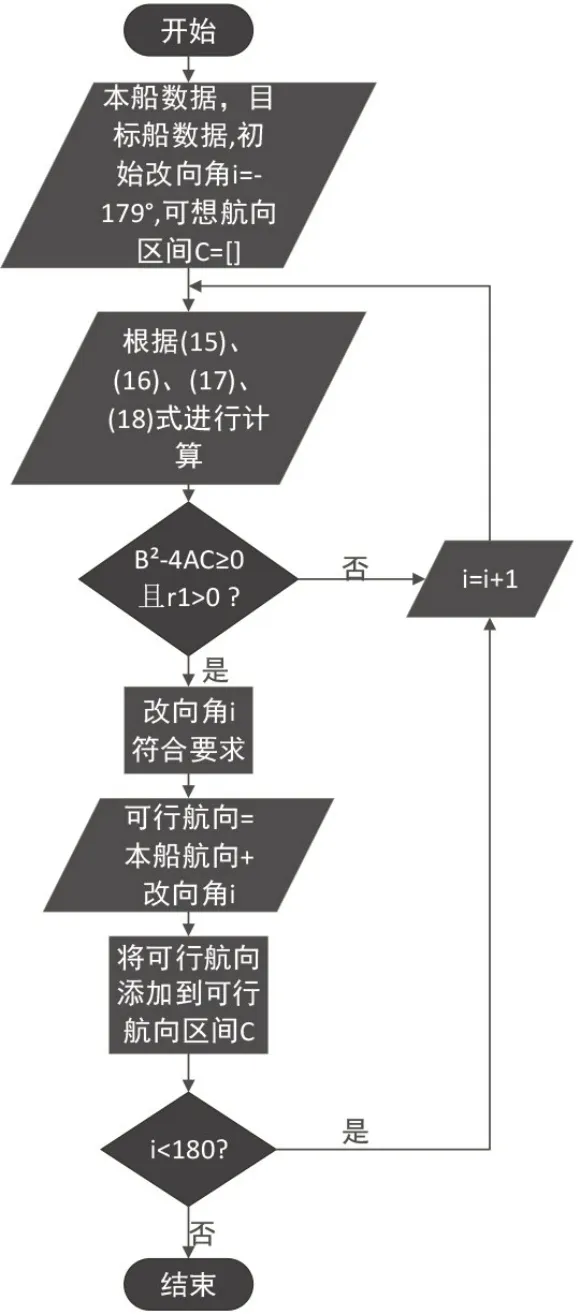
图7 对遇局面本船可行航向区间计算方法
4.3.2 对于特殊障碍物的可行航向区间
海上钻井平台、拖网渔船、拖带船舶、浅水区域、小岛等可将其归纳为圆形、多边形、条形障碍物,其可行航向区间如图8所示。其中,条形障碍物和多边形障碍物的可行航向区间求取方法相同(如图9所示),在此不重复介绍。
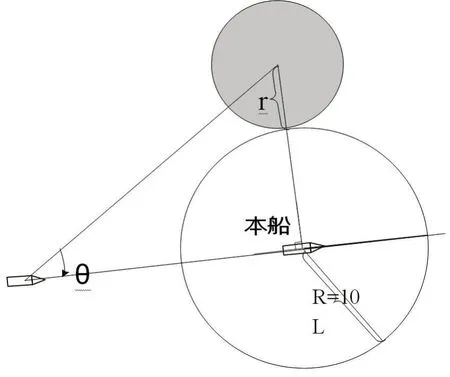
图8 圆形障碍物可行航向区间示意图
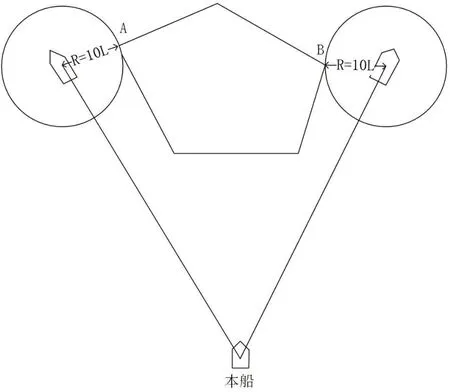
图9 多边形障碍物可行航向区间示意图
圆形目标的可行航向区间只需在目标船可行航向区间的计算方法上稍作改动,即将本船船舶领域换位圆形,其半径为10 倍本船船长L。依照(15)、(16)、(17)式的计算方法得到(18)式。(18)式中,R=10L+r,r为圆形障碍物的半径,最终得到(19)式。令A=(u2+v2) ,B=2(uxr+vyr),C=方程的两个根r1=(-B+,若圆形障碍物会进入本船领域,仍然只需满足B2-4AC>0 且r1 >0 即可。

多边形障碍物需先确定最外端的端点A、B,而点状障碍物可按圆形障碍物处理,只需将其半径r设为0即可。但需要注意的是左端点只取其可行航向区间的右边界,右端点只取其可行航向区间的左边界。
4.3.3 避让航向计算
目标船和特殊障碍物可行航向区间的计算方法均已完成,按照一定的算法即可找出既符合《避碰规则》和良好船艺又能避让所有目标船和特殊障碍物的最优避让航向,具体计算方法为图10。
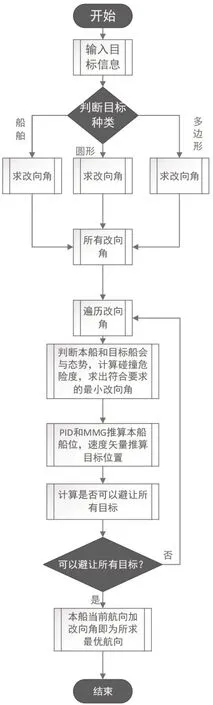
图10 避让航向计算方法
4.4 复航模型
复航在航海实践中有恢复原航向和恢复原航线之分,在此采取恢复原航向作为本章复航的定义。在基于第4.3 节求取了本船的最优航向的基础上,本船改向至该航向进行避让,避让完成的某一时机本船进行复航,本船改向避让和复航的非线性运动过程均用第3 章介绍的MMG 模型和PID模型进行模拟刻画,复航时机的具体计算方法为图11。
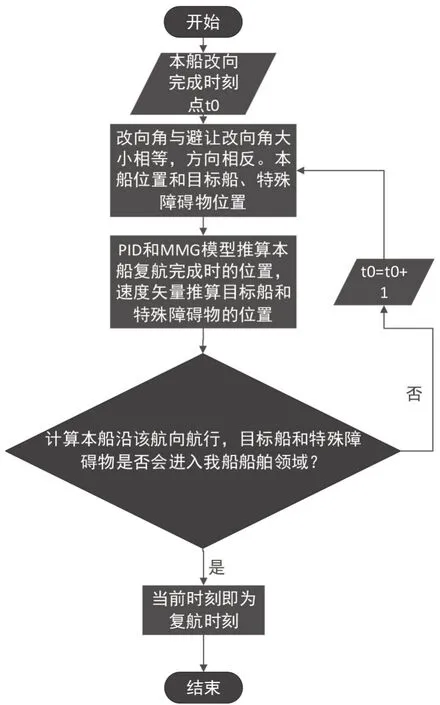
图11 复航时机计算方法
5 模拟仿真与结论
设置我船位置为(0,0),速度6.5m/s,航向000。目标船一位置(2×185.2m,6×1852m)航向180;目标船二位置(-500m,2×1852m),航向000;目标船三位置(4×1852m,4.1×1852m),航向265;目标船四位置(-5.1×1852m,5×1852m),航向086;目标船五位置(8×1852m,9×1852m),航向240。 多边形目标位置(-4500m,5000m),(-2500m,5000m),(-3000m,4000m),(-4000m,4000m)。圆形目标位置(10000m,10000m),半径700m。根据最优避让航向计算方法得出最优避让航向为030。随后根据复航时机计算方法得到本船在改向避让达到目标航向后205 秒可以恢复原航线,模拟仿真结果为图12。

图12 模拟仿真效果图
在基于1-4章的模型基础上,本船可对多个目标船和多种会遇态势并存且存在特殊障碍物的复杂环境中计算出最优避让航向和复航时机,由模拟仿真效果来看,所采用的相对速度障碍避碰方法基本达到了自主避碰和复航的目的。
但这一方法距实际应用还有较大差距,一是因为MMG模型目前只是理论模型,而每条船舶的相关参数都是不同的,实际应用时需提前做大量的查阅和计算工作把本船所需的参数输入至计算机;二是此处模拟仿真所设置的场景中,目标船都在本船为中心的一定范围之内,这是因为在识别会遇局面和计算碰撞危险都时有一定的距离限制,而在航海实践中,由于多种外界干扰因素的存在,本船和目标船的实际位置存在偏差,可能会导致判断失误的情况发生。
