基于遗传算法的无人机协作波束赋形
2022-12-29杨卓明仲伟志张俊杰张璐璐朱秋明
杨卓明,仲伟志*,张俊杰,张璐璐,朱秋明
(1.南京航空航天大学 航天学院,南京 211100;2.南京航空航天大学 电子信息工程学院,南京 211100)
0 引 言
无人机(Unmanned Aerial Vehicles, UAVs)作为天地一体化信息网络空基中的重要组成部分,因其高机动性、低成本和部署简单等优点,被广泛应用于军事、民用和商业等诸多领域[1]。
随着无人机应用对自主性、智能化、多任务等方面的要求越来越高,无人机单机作业效能和智能水平已无法满足任务需求。基于此,出现了无人机集群作业的理念[2],即通过多架无人机携带相同的载荷来增大无人机作业的范围,通过所携带的不同载荷之间相互配合来提高无人机的作业精度。
然而,无人机组网通信的迅速发展,使其面临着一些新的挑战,如有限的机载能量和发射功率[3-4]带来了待机时间短、协作通信覆盖面积受限等问题,导致无人机组网通信在某些场景中的应用受到限制。因此,需要提高无人机组网系统的传输效率,从而减少传输任务的完成时间和能耗。
协作波束赋形(Collaborative Beamforming, CBF)技术在延长通信网络寿命、提高传输效率方面具有一定的优势,为提高无人机组网通信的性能提出了可行方法。当无人机天线为全方向辐射时,只有小部分信号能量被接收机接收,成为有用信号,而大部分信号能量被辐射到其他的接收机而成为干扰信号。协作波束赋形通过协作波束设计,使组网无人机的能量集中在特定方向,从而提高传输效率,解决单架无人机无法长时间大范围覆盖目标区域的问题。
协作波束赋形技术的研究主要体现在波束方向图的优化上,而波束方向图的优化主要集中在最小化旁瓣电平上。
CBF的研究工作主要分为波束赋形系数扰动和节点扰动两类。波束赋形系数扰动通过改变幅度和相位这两个系数实现,而节点扰动是通过节点选择和节点放置来完成。节点选择的基础是选择阵列中天线单元的位置,由于位置改变而产生的相位偏移使得在目标位置处产生相干组合信号;而节点放置则是选择每个天线的最佳位置,并对其进行定位,以获得最优波束方向图。针对波束赋形系数扰动的研究中,文献[5]使用遗传算法对随机天线阵列中各个节点的激励能量进行了优化,降低峰值旁瓣电平(Peak Sidelobe Level, PSL)的同时也节省了节点的能量。文献[6]提出一种采用布谷鸟搜索算法计算阵列中各节点最优激励电流的策略,得到较低的旁瓣电平。针对节点选择优化的研究中,文献[7]提出一种基于遗传算法(Genetic Algorithm,GA)的节点选择方法,实现了模拟均匀空间线性阵列的PSL最小化,改善了波束方向图。文献[8]提出一种准圆形节点选择方法,使用粒子群优化算法(Particle Swarm Optimization, PSO)的一种变体来减少CBF中的PSL。
本文结合上述研究,以最小旁瓣电平为优化目标,利用遗传算法选出了组成CBF的最优节点和每个节点的最优波束赋形系数,获得了具有较低PSL的波束方向图,并对最优节点选择和最优系数优化两种方法进行了对比分析,为后续研究奠定了基础。
1 系统模型
协作波束赋形的系统模型如图1所示。其中N个分布在半径为R的无人机通信设备,构成了虚拟随机天线阵列(Random Antenna Array, RAA),产生指向远程基站的高增益主瓣。

图1 协作波束赋形系统模型
图中,(c1,c2,…,cN)为离散分布的无人机节点,N为无人机节点的总数;I为目标基站位置;U为干扰基站位置。几个无人机节点随机分布于一个集群中,每个节点可以直接与同一集群中的其他无人机节点通信。方位角φ∈[-π,π],俯仰角θ∈[0,π]。其中节点c1是簇头(Cluster Head , CH),作为簇中所有其他节点的几何参考点。所有无人机协作节点都位于一个x-y平面上,随机分布在半径为R的圆盘中。簇头作为极坐标中的极点,坐标为(0,0)。令第n个节点的极坐标为(rn,ψn),该节点与簇头c1的距离为rn。目标基站I位于xyz平面,相对簇头的距离为A、方位角为φ0、俯仰角为θ0的基站在球坐标中可表示为(A,φ0,θ0)。
每个无人机节点都配备了各向同性天线。假设节点之间和到基站的通道都是理想的,不存在多径衰落和阴影效应。所有无人机节点都知道自己的位置,并且完全同步,因此假设不存在频率载波、相位和时间抖动。
协作无人机节点和基站的拓扑结构如图1所示,第k个无人机节点(rk,ψk)与基站的距离可以表示为
(1)
在远场条件下,当每个节点以1/N的能量进行传输时,N个无人机协作节点的阵列因子为
(2)
式中:wk=ζkejψk为第k个节点的传输权重,ζk为传输能量,ψk为节点k的初始相位。
在开环系统中,假设目标位置仅簇头已知,而其他无人机节点只需要知道其自身相对于簇头的位置即可。开环状态中无人机节点的初始相位为
(3)
在开环系统中,N个无人机节点的阵列因子表达式可推导为

(4)
假设所有无人机协作节点传输相同的能量ζ,在理想状态下,接收功率变为|Nζ|2,而单独的无人机节点传输仅产生ζ2的传输功率[9]。
引入文献[10]中提出的一些描述波束方向图统计特性的参数来评估算法性能。这些特性参数包括波束方向图的3 dB波束宽度、3 dB旁瓣区域以及平均方向性。
2 基于遗传算法的协作波束赋形设计
基于遗传算法的协作波束赋形方法以最小化旁瓣电平为目标,以节点选择和系数优化为手段,采用遗传算法进行协作波束赋形。
在无人机通信网络中,协作波束赋形的过程可分为两个阶段:(1)信息共享阶段;(2)协作波束赋形阶段。在第一阶段,无人机源节点CH向同一集群内的所有无人机节点传播目标基站的信息,集群中的每个节点在接收到来自CH的数据后,通过乘以复数权重来对齐数据信号的相位。
在协作波束赋形中,每个无人机节点将定期传播一个信号,以通知集群中的其他节点的位置坐标。然后,相邻节点将信息保存到位置向量表中。当CH想要执行协作波束赋形时,先使用遗传算法来计算集群中每个节点的激励能量,随后,在信息共享阶段,每个节点的能量信息将与预期数据一起传播到节点上,这将确保生成的波束方向图具有较低的旁瓣,并且在波束形成过程中不会浪费不必要的能量。
基于遗传算法的协作波束赋形方法流程图如图2所示。首先,建立协作波束赋形系统模型,并选择优化目标,即最小化旁瓣电平;其次,确定优化途径,包括节点选择和振幅优化两种途径,对要优化的目标问题进行建模;最后,利用遗传算法进行优化。
遗传算法是一种基于自然选择和自然遗传机制的全局搜索算法。优化问题可以根据其生物环境进行相应的建模,群体中的每一条染色体代表了优化问题中的一个可能解。遗传算法创造了一个生物环境,使染色体进化到最佳状态。经过无休止的一轮进化后,弱染色体被丢弃,在种群中只留下合适和强壮的染色体[11]。遗传算法作为元启发式算法的一种,在协作波束赋形技术上有着较好的适用性。遗传算法流程图如图3所示,其逻辑过程大致分为5步:初始化种群和染色体构造、适应度评估、亲代选择、交叉及变异、收敛度判断。
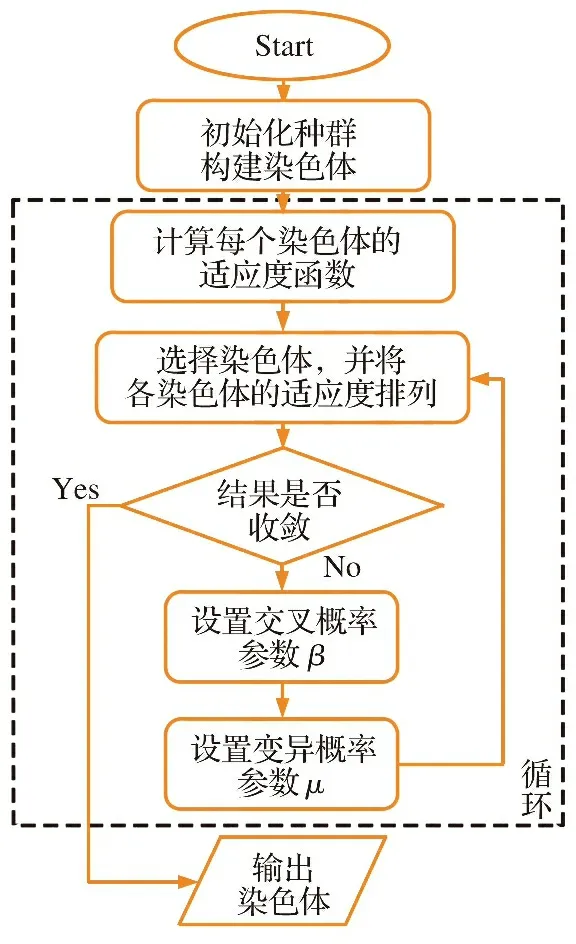
图3 遗传算法流程图
步骤1:初始化种群及染色体构建
首先生成M组N个随机数作为初始基因组,染色体的基因组与节点的激励能量ξ相对应,如图4所示。因此,每条染色体G(ξ)包含N个基因g(ξ),其中ξk表示第k个无人机节点的激励能量值。
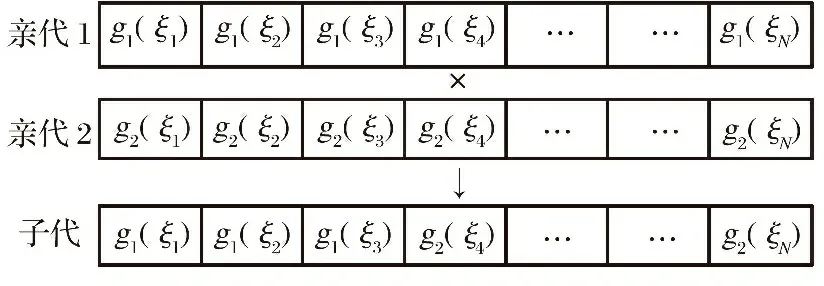
图4 染色体构建
在第一次迭代时,该遗传算法的基因组中,所有节点的激励能量都设置为单位1。
步骤2:适应度函数评估
适应度函数用于评估旁瓣电平,并从基因集合的所有能量组合中获得可能的最低峰值旁瓣电平。适应度函数如下:
Fi=max[20lgF(θSL,w)]
(5)
式中:θSL=argmax{F(θ,w)}为阵列因子的局部最大值对应的角度,w为节点的传输权重,F为无人机节点集群形成的阵列因子。
步骤3:亲代选择
生成初始种群后,将进行亲代选择过程。可以使用轮盘赌、排序等多种方法来完成选择过程。本文采用排序选择法,即从亲代中选择适应度高的染色体,丢弃适应度低的染色体。
步骤4:交叉与变异
随机选择一对染色体作为亲代,选择一个交叉点,该点之后的部分亲代染色体交换以形成后代。这个过程称为交叉过程,如图5所示。交叉概率Pc定义为交叉操作概率。
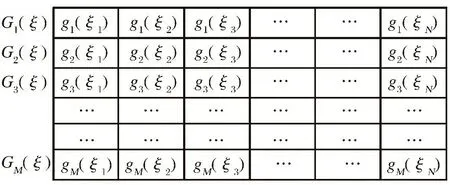
图5 交叉过程
变异过程是为了防止最优解陷入问题的局部最优化,会在发射功率限制范围内将基因值更改为随机浮点数。变异的发生概率值为Pm。
步骤5:收敛性判断
当达到最大迭代次数I时,算法停止。如果不满足条件,则转至步骤2。基于遗传算法的波束赋形系数优化旨在通过步骤1~5,为集群中的每个协作节点获得最佳激励能量。
3 仿真实验
为了验证基于遗传算法的协作波束赋形的性能,对节点选择和系数优化两种方式进行仿真分析。
3.1 节点选择
由于随机天线阵列相对于均匀线性阵列有着更高的旁瓣电平[12],所以常见的节点选择方法是一种用于选择一组无人机传感器节点阵列的方法,这些传感器节点彼此协作以执行波束赋形,来模拟理想均匀线性阵列的性能,从而达到低旁瓣电平的效果。
当俯仰角θ为90°时,式(4)可写为
(6)
基于表1所示的协作波束赋形的模拟参数,模拟了无人机节点的协作波束赋形模型。遗传算法中使用的参数如表2所示。
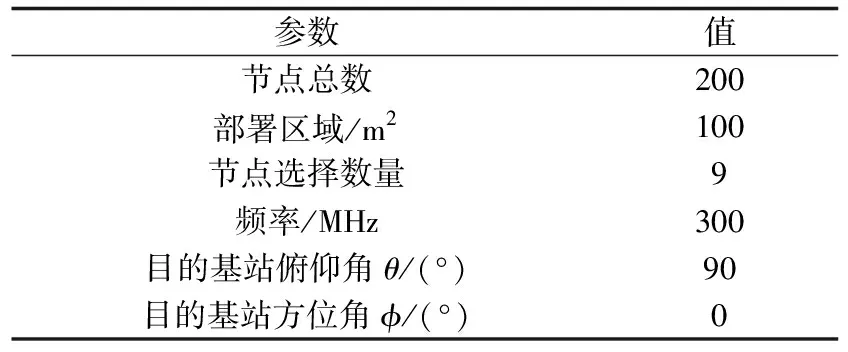
表1 协作波束赋形的模拟参数

表2 遗传算法的模拟参数
在该场景中,需要9个无人机节点来形成传感器节点的虚拟线性阵列。无人机网络节点的随机部署拓扑结构如图6所示,中心点为簇头;虚拟线与传输范围内的节点分布如图7所示;传统模拟线性阵列节点选择的一组无人机节点阵列如图8所示;遗传算法节点选择的一组无人机节点阵列如图9所示。传统方法的节点选择按照距离最近原则,可能会使部分节点距离过近,导致耦合效应,从而旁瓣电平增高。而遗传算法以旁瓣电平最小化为优化目标,选择合适的无人机节点进行波束赋形,可能会使部分节点之间的距离增大,线性拟合程度不够。遗传算法波束方向图合成结果如图10所示。

图6 无人机节点的随机部署拓扑结构
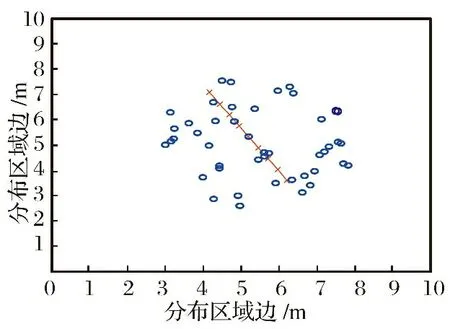
图7 虚拟参考线以及簇头和协作节点的分布
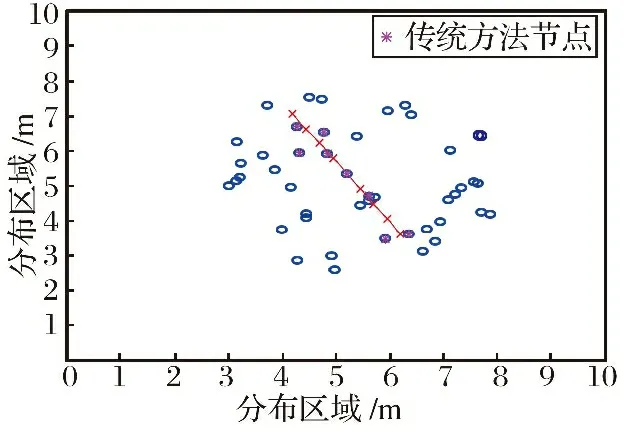
图8 传统节点选择方法的模拟线性阵列
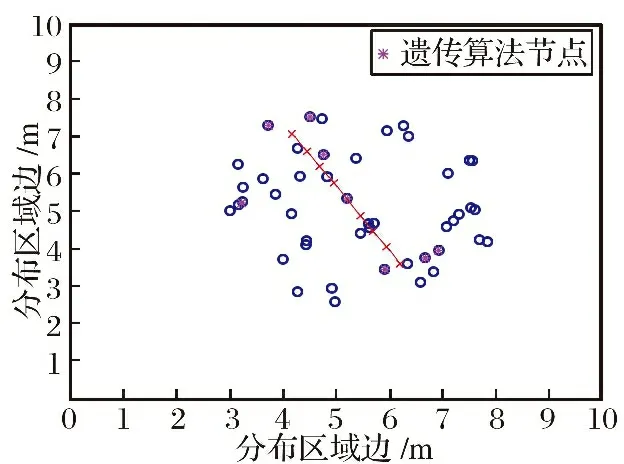
图9 遗传算法选择节点构成的阵列

图10 N=9时无人机节点波束方向图合成
仿真结果表明,与模拟线性阵列选择方法相比,采用遗传算法进行节点选择的波束方向图平均旁瓣电平较小,在-180°~-100°区域的旁瓣电平抑制能力十分明显,使用传统方法得到的峰值旁瓣电平为-3 dB,而使用遗传方法得到的峰值旁瓣电平为-5.2 dB。这表明基于遗传算法节点选择的波束赋形性能在抑制旁瓣电平方面有所改善;与使用模拟线阵的节点相比,使用遗传算法可以减少主波束的波束宽度,使波束能量更加集中在基站方向。
此外,传统方法的3 dB波束宽度为-9.3°~9.4°,为18.7°,而遗传算法的3 dB波束宽度为-13.8°~12.5°,为26.3°。传统方法的3 dB旁瓣区域为160°~180°,而遗传算法无3 dB旁瓣区域。
然而,在实际通信中,节点选择的问题在于它可能会导致某些节点比其他节点使用得更频繁。因此,并非所有节点都将被利用,而且网络可能耗尽频繁使用的节点的能量。该方法仅在网络中存在大量协作节点时才可行[13]。
3.2 系数优化仿真
鉴于节点选择的局限性,还可采用基于遗传算法的系数优化方法进行协作波束赋形。本文主要针对每个节点的激励能量进行优化,每个节点的相位信息保持不变,为节点的初始相位。
波束赋形系数优化是根据式(6),对每个参与协作波束赋形的无人机节点进行优化,得到每个无人机节点的最佳激励能量ζk。
针对数量为N的无人机节点的各个激励能量进行了优化仿真。基于表3所示的协作波束赋形的模拟参数,模拟了无人机节点的协作波束赋形模型。遗传算法中使用的参数同表2。

表3 协作波束赋形的模拟参数
无人机节点分布、波束方向以及每个节点的发射功率如图11~12所示。当N=16时,传统方法[5]的峰值旁瓣电平为-7.30 dB,利用遗传算法获得的峰值旁瓣电平为-9.88 dB,改善了2.58 dB,并且在-150°~-50°区域内的旁瓣电平抑制能力比较明显。当N=32时,传统方法的峰值旁瓣电平为-7.50 dB,利用遗传算法系数优化获得的峰值旁瓣电平为-12.44 dB,改善了4.94 dB,并且在整体区域内的旁瓣电平抑制能力比较明显。
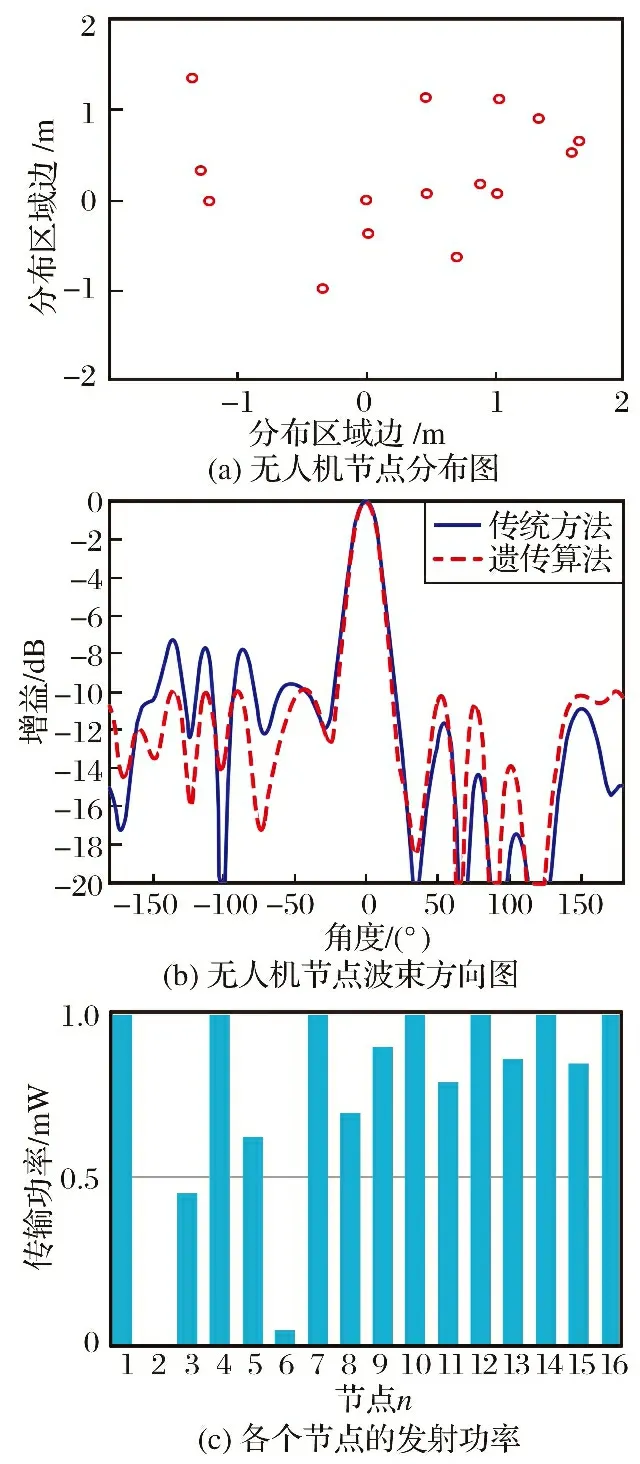
图11 仿真结果(N=16)

图12 仿真结果(N=32)
波束形成传输期间,每个无人机节点处的发射功率分布如图11(c)和12(c)所示。基于系数优化的随机天线阵列会抑制集群中某些节点的发射功率,降低平均功率,从而节省发射功率。节点发射功率的抑制量将由节点的布置决定。
当N=32时,使用遗传算法优化得到的峰值旁瓣电平随迭代次数增加的变化如图13所示。

图13 使用遗传算法优化得到的峰值旁瓣电平随迭代次数增加的变化(N=32)
为了进一步提高系数优化方法的性能,采用Monte Carlo方法对多组参数不同的节点排列进行实验仿真。假设共有50组不同的节点排列,N的范围为5~50,标准分布圆盘大小R为λ~10λ,进行100次实验并计算结果的平均值。节点数目和磁盘大小不同时,传统RAA波束赋形和基于遗传算法的RAA波束赋形的PSL对比如图14所示。RAA的PSL根据节点数的增加而减小,对于固定节点分布的RAA的PSL随着标准圆盘分布大小的增加而增加。通常,如果单元之间的平均间距小于2.5λ,则耦合效应会影响RAA的副瓣电平。因此,对单个节点的能量进行基于遗传算法的优化,可以有效地限制两个距离较近节点的能量,从而降低较小磁盘的RAA的相互耦合效应。
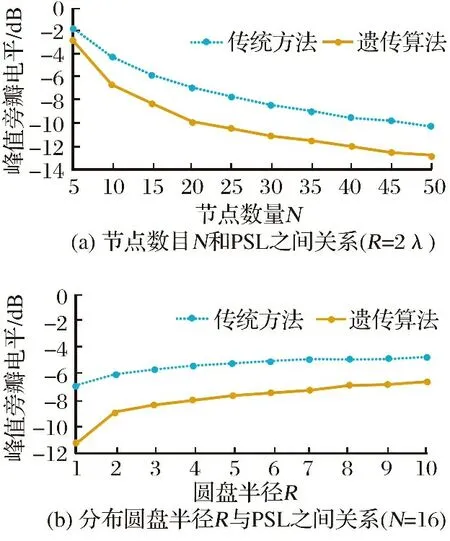
图14 传统RAA波束赋形和基于遗传算法的RAA波束赋形的PSL对比
系数优化相较于节点优化最大的优势在于可以减少每个节点发射功率,从而节省总的发射功率,延长无人机节点的待机寿命,并且相对于在节点选择中大量节点背景的限制下,系数优化可以更合理地利用每一个无人机节点。
虽然波束赋形系数优化可以明显节省每一个节点能量,但是在无人机群协作通信的过程中,由于无人机群需要编队作业,各个无人机之间的位置存在着一定的关系,所以在实际应用中仅仅使用波束赋形系数优化方法是行不通的,但也为以后的进一步研究提供了一种合理的方法。
3.3 节点相位差分析
协作波束赋形需要各个分布式节点在发射信号时的频率、时间和相位严格同步,只有这样才能达到较好的波束赋形效果。然而,在现实中每个节点的相位信息可能存在误差。假设当各节点存在相位误差Δψk(k=1,2,…,N)时,分析其对波束赋形结果产生的影响。
(7)
在仿真实验中,各节点的相位误差Δψk的取值为[-π,π]之间的随机数。实验针对3.2节中N=16的情景中,在使用遗传算法优化前后的结果中加入节点的相位误差,传统方法和基于遗传算法波束赋形的波束方向对比如图15所示。图15(a)中,存在相位扰动的情况下,波束方向图的旁瓣电平在-60°左右有激增,这样会导致对该方向的非预期基站造成影响。图15(b)中,在使用了遗传算法对存在相位误差的结果进行优化后,虽然旁瓣电平有所改善,但并未达到最优结果。

图15 传统方法和基于遗传算法波束赋形的波束方向图
对存在相位误差的结果进行1 000次的循环试验,不使用优化算法前的峰值旁瓣电平平均值为-5.95 dB,而不存在相位误差的峰值旁瓣电平平均值为-7.30 dB,说明相位误差对协作波束赋形结果的影响很大。
然而在分析这1 000次峰值旁瓣电平值结果时,发现其中有部分优于-7.30 dB的结果,说明各节点的相位信息和激励能量一样是可以进行优化的,为进一步研究提供了合理的理论依据。
4 结 论
本文提出了一种基于遗传算法的无人机协作波束赋形方法。该方法以随机天线阵列为背景,使用节点选择和系数优化两种优化途径,通过遗传算法分别选出执行波束赋形的最佳无人机节点和各个无人机节点的最佳激励能量。提出的节点选择方法相对于传统方法可以合理地选择参与协作波束赋形的无人机节点,大大降低协作波束赋形的旁瓣电平;提出的系数优化方法可以优化每个参与协作波束赋形的无人机节点的激励能量,得到最佳波束方向图,相比优化前不仅得到更低的峰值旁瓣电平,而且降低了节点的发射功率,大大节约了能量消耗,延长了无人机组网的使用寿命。
节点选择方法的使用条件相对苛刻,需要在大量的无人机节点条件下才能有效进行,且可能会耗尽频繁使用的无人机节点能量,进而造成整个无人机组网系统性能的下降。对于系数优化方法,由于无人机群需要编队作业,各个无人机之间的位置存在一定的关系,导致系数优化方法的使用受限。此外,实验中发现,除了激励能量的大小对波束方向图的旁瓣电平有一定的影响,各节点的相位信息变化也有着一定的影响。因此,在未来的研究中如何合理利用无人机群之间的编队位置,将节点选择和激励能量优化相结合,以及能否同时优化激励能量和相位信息是一种新的研究方向。
