车用异步电机电驱动系统高性能控制平台设计及实现
2022-12-28林立姬长义林敏之李亚楠
林立,姬长义,林敏之,李亚楠
(1.422000 湖南省 邵阳市 多电源地区电网运行与控制湖南省重点实验室;2.422000 湖南省 邵阳市 邵阳资水科技有限公司)
0 引言
近年来,环境污染、能源紧张、全球变暖等一系列问题以及国家政策的大力扶持,使得电机驱动代替传统内燃机驱动成为一种趋势[1-2]。异步电机因其成本低、结构简单、结实耐用、相较于永磁同步电机无永磁体退磁风险等优点,在新能源汽车、农业机械、家电等领域得到广泛应用[3-4]。随着技术的发展,研究高性能的电驱动控制系统对纯电动汽车的发展至关重要。目前,国内多以永磁同步电机作为电动汽车驱动,异步电机在此领域的应用与研究较少。为进一步研究车用异步电机高性能控制策略,搭建易于开发车用异步电机高性能控制策略实验平台就显得尤为重要[5-8]。本文在分析了异步电机矢量控制系统原理的基础上,在MATLAB/Simulink 中完成了对基于空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)控制的车用异步电机矢量控制系统模型的搭建,并在MATLAB/Simulink 与CCS6.2 环境中编写了基于TMS320F28335 控制的异步电机矢量控制系统代码生成软件,其中包含中断模块、脉宽调制(Pulse width Modulation,PWM)模块、正交编码(Quadrature Encoder Pulse,QEP)模块、串口通信(Serial Communication Interface,SCI)模块等,使用LabVIEW 建立了上位机监控界面,搭建了以IPM-FSBB30CH060 为逆变电路主要元件的车用异步电机高性能控制平台,对车用异步电机高性能控制策略进行了较为全面的研究。
1 异步电机数学模型及坐标变换
在分析异步电机数学模型时,通常认为三相绕组对称,且忽略空间谐波,产生的磁动势沿气隙按正弦规律分布。不考虑铁心损耗、磁链饱和以及温度、频率变化对绕组电阻的影响。
为提高异步电机控制性能,需要针对其非线性、多变量、强耦合的特点[9-10],分析转矩、磁链规律,建立动态数学模型。
1.1 αβ 坐标系下的状态方程
异步电机αβ坐标系下的状态方程为:
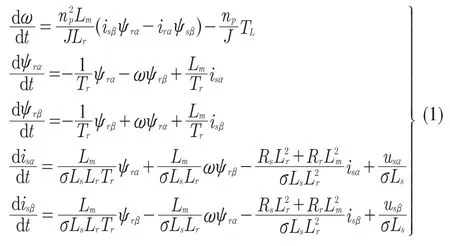
式中:Ls——电机定子自感;Lr——电机转子自感;Lm——电机定、转子间互感;σ——漏磁系数,;Tr——转子电磁时间常数,;ψrα,ψrβ——转子磁链;Rs、Rr——定、转子电阻;ω——电磁角速度;TL——负载转矩;J——转动惯量。
电磁转矩方程:

式中:np——异步电机极对数。
1.2 坐标变换
1.2.1 三相-两相变换(Clark 变换)
αβ坐标系下的电流iα、iβ可用三相绕组电流ia、ib、ic表示为:

1.2.2 Park 变换
αβ坐标系下的电流iα、iβ可用isd、isq表示为:

2 SVPWM 原理与实现
2.1 SVPWM 原理
8 个基本电压矢量由逆变器6 个功率开关器件通断产生,其中6 个有效矢量、2 个零矢量。SVPWM 将αβ坐标系划分为6 个扇区,如图1 所示。
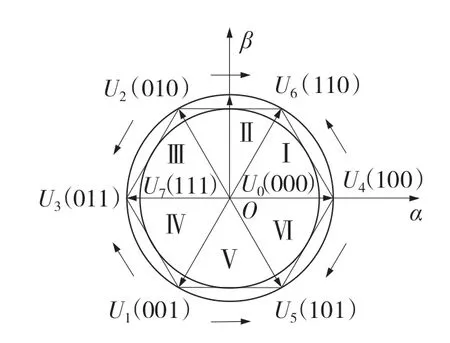
图1 电压空间矢量图Fig.1 Voltage space vector diagram
以扇区I 为例,期望输出电压矢量为Uout可由有效电压矢量U4、U6及零矢量U0、U7合成,矢量U4、U6作用时间计算如式(5)所示。

式中:Ud——直流端电压;Ts——PWM 作用周期;θ——期望电压与基本电压U4的夹角;t1,t2——基本电压U4、U6作用时间。零矢量作用时间为t0=Ts-t1-t2。这就要保证Ts>t1+t2,当Ts< t1+t2时就要对作用时间进行调制。
2.2 SVPWM 实现
首先对期望电压进行扇区判断,扇区的判断需要引入中间量Uref1,Uref2,Uref3,A,B,C。令:
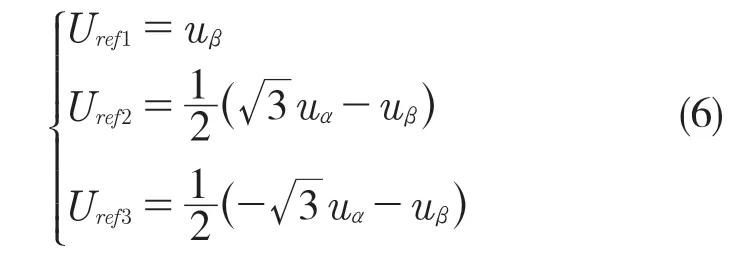
当Uref1>0,则A=1,否则A=0;
当Uref2>0,则B=1,否则B=0;
当Uref3>0,则C=1,否则C=0;
扇区值N=A+2B+4C,根据表1 得到期望电压所在扇区。

表1 扇区值与扇区关系Tab.1 Relationship between sector value and sector
扇区判断完成后需要计算相邻电压矢量作用时间,令:

不同扇区对应的矢量作用时间如表2 所示。

表2 各扇区对应矢量作用时间Tab.2 Vector action time corresponding to each sector
利用零矢量分散的实现方式确定切换时间,计算方式为:

根据表3 确定各扇区的矢量切换时间点。

表3 各扇区矢量切换点Tab.3 Vector switching point of each sector
Tcm1、Tcm2、Tcm3是与三角载波进行比较产生PWM 脉冲的3 个比较值。
3 矢量控制系统仿真分析
依据式(1)-式(8)分析,分别搭建异步电机、SVPWM、逆变器、Clark/Park 变换与其逆变换的仿真模型,组成系统仿真模型,如图2 所示。
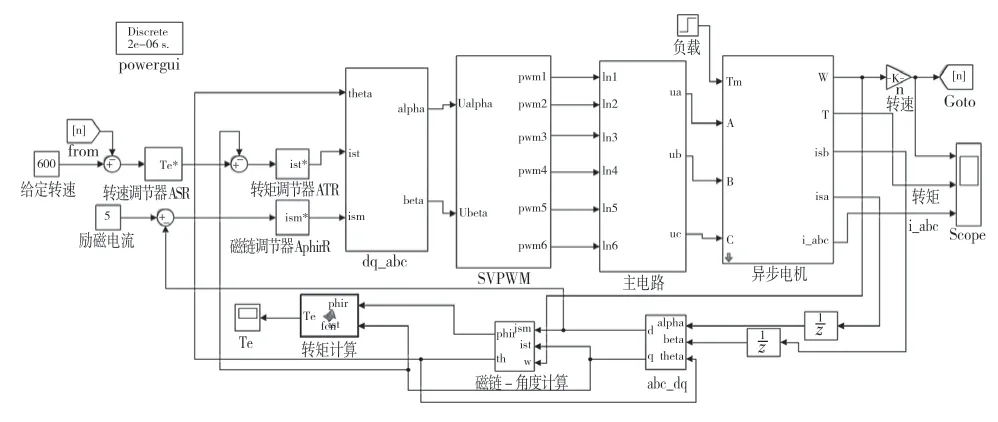
图2 系统仿真模型Fig.2 System simulation model
仿真时,异步电机参数为:Ls=Lr=0.071 H,Lm=0.069 H,Rs=0.435 Ω,Rr=0.816 Ω,J=0.19 kg·m2,np=2。转速调节器ASR 中,kp=50,ki=0.8,积分内限幅为±80,外限幅为±50。转矩调节器ATR中,kp=50、ki=0.8,积分内限幅为±60,外限幅为±80。磁链调节器Aphir 中,kp=1.8,ki=100,积分内限幅为±15,外限幅为±10。转速给定初始值600 r/min,励磁电流给定初始值idref=5 A。0~0.5 s时,TL=10 N·m,0.5~1.0 s 时,TL=30 N·m,仿真结果如图3 所示。

图3 转速、转矩及电流仿真波形图Fig.3 Simulation waveform of speed,torque and current
由图3 可知,系统在0.25 s 快速达到给定转速值,电流能够稳定在±15 A 内;0.5 s 突加负载至30 N·m 时,输出转矩能够快速响应,经过0.015 s达到稳态且转速波动很小。仿真结果表明,所建立的异步电机矢量控制系统具有良好的动态响应和较好的抗负载扰动能力。
4 实验平台设计
4.1 硬件实验平台设计
本文以DSP 控制器TMS320F28335 为核心搭建了硬件平台,系统硬件原理框图如图4 所示。
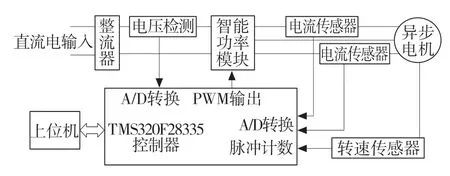
图4 系统硬件原理框图Fig.4 Schematic block diagram of system hardware
硬件实验平台如图5 所示,图5 中:A——上位机;B——TMS320F28335 控制器;C——驱动板;D——24 V 开关电源;E——220 V AC-DC 开关电源;F——异步电机;G——正交光电编码器。
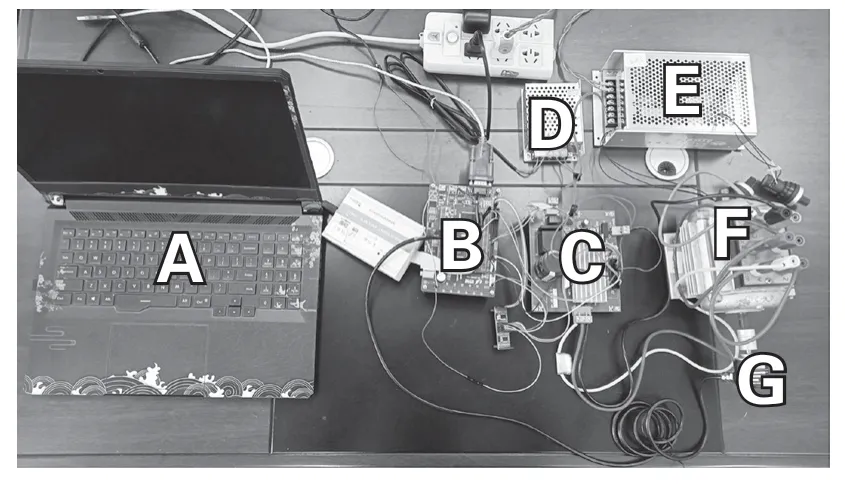
图5 硬件实验平台Fig.5 Hardware experiment platform
上位机负责程序编写、代码生成,并利用通信串口与控制器通讯,通过监控界面实现对电机运行状态的在线观测与实时控制。驱动板由主电路、IPM-FSBB30CH060、电流传感器、电压传感器等组成。IPM-FSBB30CH060 内部集成有控制电路、逻辑电路、检测电路和保护电路,控制电路采用大功率晶体管,具有耐高压、高电流密度等优点。24 V 开关电源为驱动板供电,220 V AC-DC 开关电源为主电路供电。2 个电流传感器测量V 相、W相电流,电压传感器检测主电路电压。
4.2 软件实验平台设计
软件平台由异步电机矢量控制代码生成程序和系统监控界面组成,异步电机矢量控制代码生成程序如图6 所示。
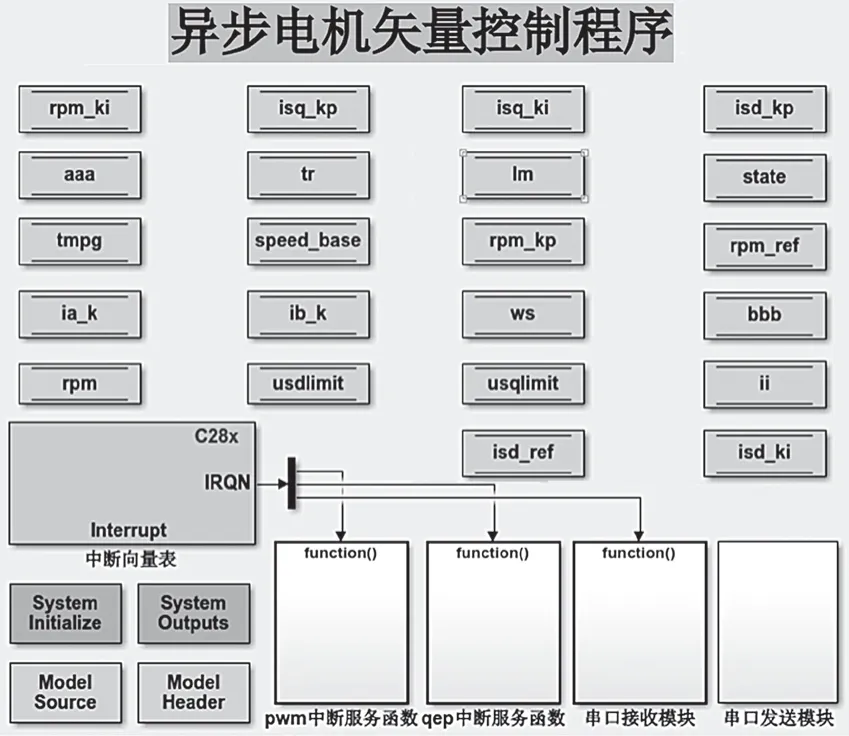
图6 矢量控制程序Fig.6 Vector control program
异步电机矢量控制程序由中断向量表、PWM模块、QEP 模块、SCI 模块组成。state 为软件启停参数,speed_base 为转速计算参数,tmpg 为单位时间脉冲个数,rpm_kp、rpm_ki、isd_kp、isd_ki、isq_kp、isq_ki 分别为转速调节PI 参数、定子励磁电流调节PI 参数、定子转矩电流调节PI 参数,tr 为转子时间常数,lm 为互感、ws 为转差频率、usdlimit、usqlimit 为励磁电压和转矩电压的限幅、rpm 为转速调节器的反馈,ia、ib、ic 为三相电流,aaa、bbb 为 A、B 相电流数字量,ia_k、ib_k 为 A、B 电流数字量补偿。
PWM模块包含ADC采样、坐标变换、SVPWM、磁链角度计算和3 个PI 调节器(转速外环1 个,电流内环2 个)。QEP 模块用于电机转速检测。SCI 模块用于上位机串口与驱动系统半实物仿真平台通讯,并通过监控界面实现对电机运行状态的在线观测与实时控制。监控界面能够检测并图像显示转速、三相电流、定子转矩电流、定子励磁电流以及励磁电压、转矩电压。
5 实验验证
为了验证设计的异步电机高性能控制平台的性能,以额定功率PN=60 W、频率f=50 Hz、额定电流IN=0.35 A、额定电压UN=380 V、额定转速nN=1 430 r/min 的三相异步电机作为被控对象进行实验验证,实验时给定初始转速为600 r/min,监控界面数据如图7 所示。
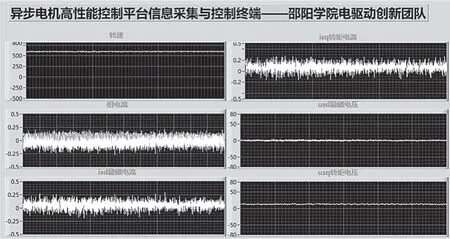
图7 上位机检测数据Fig.7 Upper computer speed detection
系统能够快速达到给定转速且稳定运行,电流能够稳定在±0.2 A 内。实验结果表明,所搭建的异步电机控制平台具有良好的动态响应,所构建的上位机监控界面实现了对转速、相电流、励磁电流、转矩电流等信息的实时数据采集与图像化显示。
6 结语
文章研究了异步电机矢量控制系统原理,分析了异步电机数学模型以及SVPWM 调制方法,利用MATLAB/Simulink 搭建了异步电机、坐标变换、主电路和SVPWM 控制算法仿真模型,对异步电机矢量控制进行了系统建模及仿真验证,并在MATLAB/Simulink 和CCS6.2 环境中搭建了以TMS320F28335 控制的异步电机矢量控制系统代码生成软件,利用LabVIEW 构建了上位机监控界面,搭建了硬件实验平台。文章所设计搭建的异步电机高性能控制平台满足了车用异步电机高性能控制策略开发需求,可以进一步进行异步电机高性能控制策略研究,在工程实践应用上具有重要参考价值。
