BDS-3精密单点定位模糊度解算及性能评估
2022-12-26谭涵
谭涵
(重庆市勘测院,重庆 401121)
0 引 言
北斗卫星导航系统(BDS)是中国从国家安全和经济发展角度考虑,自行研制的全球卫星导航系统(GNSS);旨在为全球用户提供高精度、全天候、全天时的定位、导航和授时(PNT)服务[1].截至2012年底,中国完成了北斗区域卫星导航系统(简称北斗二号系统,BDS-2)的建设并正式为亚太地区提供导航定位服务[2].2015年3月成功发射了第一颗全球卫星导航系统(简称北斗三号系统,BDS-3)试验卫星,用以验证BDS 新的信号和技术.2018年12月27日,中国正式宣布BDS-3 基本系统建设完成,2020年6月23日,BDS-3发射最后一颗全球组网卫星.至此,BDS-3 全面部署完成.
精密单点定位(PPP)是基于单台接收机的观测值,通过精密卫星轨道和钟差改正等处理方法,获取高精度位置坐标的技术方法[3],目前已经在变形监测、环境监测、航空摄影以及低轨卫星定轨等领域中得到了广泛应用[4-7].随着BDS 的建设,国内外学者也相继利用其观测值进行导航定位试验.文献[8]基于“北斗卫星观测试验网”数据实现了静态浮点解,结果显示BDS 静态 PPP 精度可以达到厘米级.文献[9]进行了BDS 静态 PPP 实验,水平和垂直方向误差最高达 12 cm,文献[10]利用北京和武汉站1 周的观测数据进行了BDS 静态和动态PPP 试验,实现了单天静态解1~2 cm、动态解4~6 cm 的定位精度.另外,受卫星端的多路径的影响,BDS-2 卫星伪距观测值存在与高度角有关的误差.针对该误差,文献[11]提出了高度角改正模型,经过该模型改正后,系统误差得到明显的改善.文献[12]建立了BDS 相位小数偏差(UPD)估计模型并分析BDS PPP 固定解定位性能,结果表明,BDS PPP 固定解的首次固定时间超过6 h,固定成功率小于 35%;文献[13]评估了BDS UPD 精度,并测试了BDS、GPS+BDS 的 PPP 固定解性能.
然而BDS-3 已于2018年底正式提供全球定位服务,目前针对北斗 PPP 的研究主要集中于BDS-2卫星系统,对于BDS-3 的研究结果相对甚少.PPP 作为一种有效便捷的定位技术,能够一定程度发挥BDS 的利用度;研究分析BDS-3 PPP 的定位性能具有重要的现实意义.因此,本文基于国际GNSS 服务(IGS)提供的 MGEX (Multi-GNSS Experiment)测站的观测数据,进行BDS-3 组网星模糊度解算与定位精度评估.
1 函数模型
1.1 PPP 观测方程
双频无电离层组合常被用于消除PPP 观测方程中电离层延迟的一阶项影响,可表示为

式中:和Lsr,IF分别为无电离层组合伪距和相位观测值;ρg为卫星与接收机间的几何距离;c为真空中的光速;λIF为无电离层组合的载波长度;tr、ts分别为接收机钟差与卫星钟差;dr,IF、分别为接收机端与卫星端的伪距码硬件延迟;br,IF、bsIF分别为接收机端与卫星端的载波相位硬件延迟;Trs为对流层延迟;εP、εL分别为伪距与相位观测值的测量噪声与多路径影响之和,通过引入精密星历和钟差产品可以消除卫星轨道和钟差误差,其余误差如地球固体潮、海洋潮汐、相对论效应、对流层延迟干分量、天线相位缠绕以及天线相位中心偏差和变化都能根据已知模型进行修正[14-15].
1.2 UPD 估计和模糊度固定
载波相位观测值中UPD 和模糊度线性相关,模糊度参数会吸收卫星端和接收机端的UPD 参数,导致模糊度参数失去其整周特性.因此需要分离UPD,进而恢复模糊度的整数特性[16].通常无电离层组合的模糊度可以表示为宽巷(WL)模糊度和窄巷(NL)模糊度的组合


式中:λWL为WL 模糊度的波长;为WL 浮点模糊度;NWL为WL 整周模糊度.在固定一个接收机端或者卫星端UPD 之后,通过建立合适的GNSS 参考网,利用最小二乘解算即可求解得到参考网中所有的UPD 参数.利用得到的接收机和卫星UPD,WL 模糊度可以固定到最近的整数.
将固定的WL 模糊度代入无电离层组合模糊度表达式,此时WL UPD 会NL 模糊度吸收,式(3)可以重新表示为
式中:λNL为NL 模糊度的波长;为NL 浮点模糊度;NNL为NL 整周模糊度.与WL UPD 的计算过程类似,通过一个合适的参考网通过最小二乘联立求解即可得到接收机和卫星端NL UPD.
将通过全球测站观测数据计算得到的UPD 提供给PPP 用户,PPP 用户即可利用该产品进行模糊度固定.首先,对WL 模糊度进行UPD 改正,取整即可得到整周WL 模糊度.其次,对NL 模糊度进行UPD改正,利用LAMBDA 搜索[18]得到整周NL 模糊度.利用固定的WL 和NL 模糊度最终恢复无电离层组合模糊度的整周特性,实现PPP 固定解.
2 实验数据及处理策略
IGS 于2011年启动了MGEX 项目[19].在众多国家机构、大学、研究机构以及世界各地的大地测量和航天机构的支持下,当前全球范围内已经建立了300 多个Multi-GNSS 测站.
本次实验选取了2020年年积日第60—89 天的MGEX 数据进行实验.利用100 个全球均匀分布的测站观测值进行UPD 估计,选择其中8 个测站进行BDS-3 PPP 固定解结果说明.测站分布如图1所示.
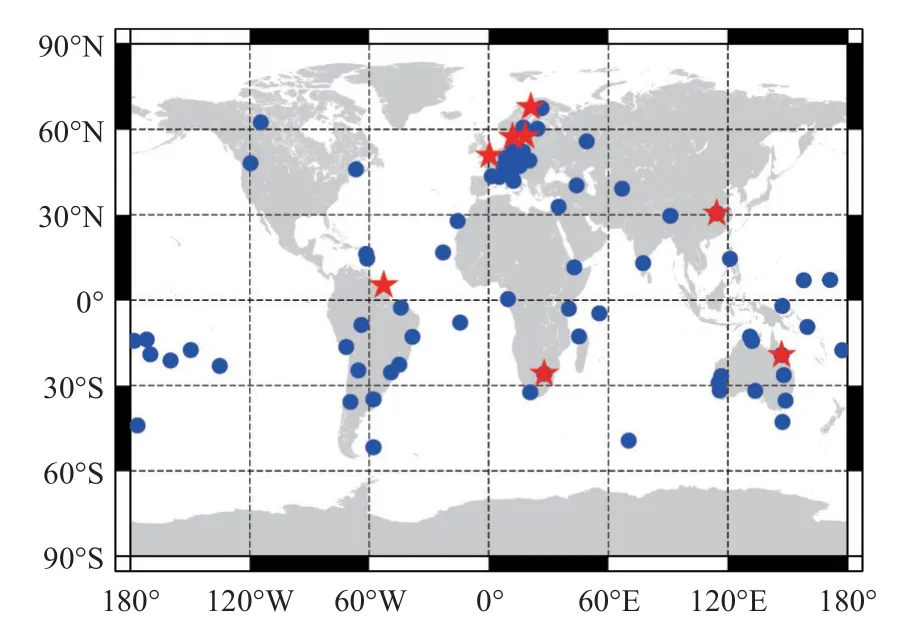
图1 UPD 估计以及PPP 测试测站分布
本文利用非差原始伪距和载波观测数据,通过BDS 的B1 和B3 频率的观测值组成无电离层组合观测值,以消除一阶电离层延迟的影响.由于高阶无电离层延迟对结果影响较小,本文不予考虑.利用Sasstamonion 模型及参数估计的方法改正对流层延迟.使用武汉大学提供的精密卫星轨道和卫星钟差产品固定卫星轨道和钟差.每30 s 对观测数据进行采样,观测截止高度角为7°,并采用高度角加权的方法处理观测值.逐历元估计接收机钟差,并且每个卫星系统设置不同的接收机钟差参数.实验期间共有18 颗BDS-3 卫星参与解算.UPD 估计及PPP 具体的处理策略如表1所示.

表1 UPD 估计和PPP 计算处理策略
3 结果分析
3.1 BDS-3 卫星UPD 结果
本文选取了100 个能够接收BDS-3 卫星信号的MGEX 测站进行UPD 估计.图2展示了部分BDS-3卫星与GPS 卫星30 天的WL UPD 序列.如图2所示,实验期间BDS-3 卫星的WL UPD 总体表现十分稳定,与GPS 卫星WL UPD 结果稳定程度相当,波动值不超过0.1 周.年积日第82 天时,BDS-3 WL UPD 发生了小的跳变,随后恢复稳定.这样的变化可能与基准变化有关.

图2 BDS-3 和GPS 卫星2020年年积日第60—89 天的WL UPD 序列
图3展示了所有BDS-3 WL UPD 序列的标准差.由图3可知,所有BDS-3 WL UPD 序列的标准差分布于0.015 周和0.097 周.其中,C36 和C37 两颗卫星的WL UPD 值较大,分别为0.056 周和0.097 周,这可能是由于能够观测到这两颗卫星的观测站较少所致.统计结果显示,BDS-3 卫星的WL UPD 平均标准差为0.025 周,满足了模糊度固定的要求.

图3 BDS-3 卫星WL UPD 序列标准差统计结果
利用成功固定的WL 模糊度以及浮点无电离层组合模糊度计算得到NL UPD.图4为部分BDS-3 卫星年积日第70 天的NL UPD 序列图.为方便比较,图4(b)显示了部分GPS 卫星的NL UPD 序列.结果表明:BDS-3 卫星的NL UPD 在单天范围内较为稳定,波动值在0.2 周以内.总体上看,BDS-3 部分卫星的NL UPD 序列的稳定性略低于GPS 卫星的结果,这可能与BDS-3 卫星的跟踪站数量以及精密轨道与钟差产品的精度相对较低有关.

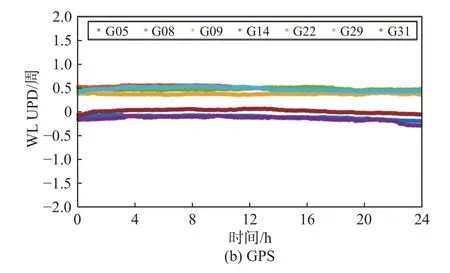
图4 BDS-3 和GPS 2020年年积日第85 天的NL UPD 序列
图5给出了BDS-3 每颗卫星的NL UPD 序列的标准差的统计结果.图5的结果显示所有BDS-3 卫星的NL UPD 序列的标准差在0.1 周以内.其中,C24 卫星的NL UPD 标准差最小为0.009,C32 卫星的NL UPD 标准差最大为0.056 周.BDS-3 所有卫星NL UPD 平均标准差为0.026 周,精度满足PPP 模糊度固定的要求.
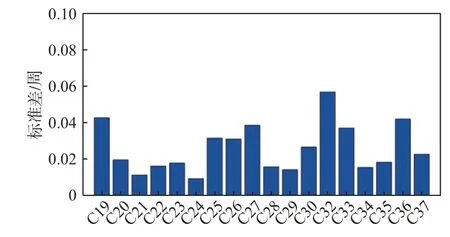
图5 BDS-3 卫星NL UPD 序列标准差统计结果
3.2 BDS-3 PPP 结果分析
受BDS-3 精密轨道和钟差产品卫星数量的限制,研究时间段内仅有18 颗可用卫星,因此本文选取了观测条件较好的8 个测站(HARB、HERS、KIR8、KOUR、ONSA、TOW2、VIS0、WUH2)进行PPP 试验,来分析BDS-3 PPP 单天的定位结果,测站分布如图1的红色五角星所示.作为对比,对实验采用的所有测站同时进行解算GPS PPP 的定位结果.实验数据均来自IGS 的MGEX 观测网.精密轨道和钟差均采用武汉大学IGS 分析中心提供的产品.表2给出了8 个PPP 测站的基本信息,包括测站经纬度、所属国家、接收机类型以及接收机天线类型.

表2 8 个PPP 测站基本信息
图6给出了ONSA 站和VIS0 站2020年年积日第62 天的BDS-3 卫星浮点解PPP 结果在东(E)、北(N)、天顶(U)方向的坐标偏差序列,同时给出了GPS PPP 定位结果作为对比.由图6可知,收敛后BDS-3 PPP 的结果与GPS 的结果相当且比较稳定,均在毫米至厘米级,但是单GPS PPP 的收敛时间要优于BDS-3 的结果.这主要是由于GPS 的可用卫星数相对较多,受精密星历卫星数的限制,研究时间段内仅有18 颗可用于BDS-3.

图6 ONSA 站和VIS0 站2020年年积日第62 天BDS-3 和GPS PPP 浮点解定位误差序列
通过估计得到稳定可靠的BDS-3 UPD 产品后,即可利用UPD 产品进行模糊度固定,获得PPP 固定解的结果,进一步分析评估BDS-3 PPP 的结果.图7给出了ONSA 站和VIS0 站2020年年积日第62 天BDS-3 PPP 浮点解和固定解的定位误差序列.由图7可知,相较于PPP 浮点解的结果,在BDS-3 PPP 模糊度固定后,收敛时间显著降低,并且定位精度也得到了明显地提升.
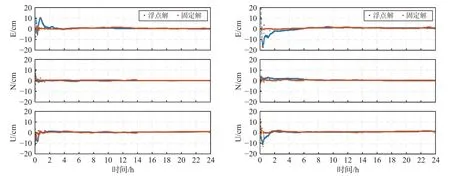
图7 ONSA 站和VIS0 站2020年年积日第62 天BDS-3 PPP 浮点解和固定解的定位误差序列
为了分析BDS-3 PPP 的固定效果,统计了8 个测站共计30 天数据(2020年年积日第60—89)的固定解平均固定百分比.图8给出了所有测试站共计30 天的固定解平均固定百分比的结果.结果表明:所有测站的平均固定百分比都超过了90%,最小和最大的平均固定百分比分别为94.1%和99.1%,分别对应KOUR 站和ONSA 站.统计结果显示BDS-3 卫星的固定效果表现良好.
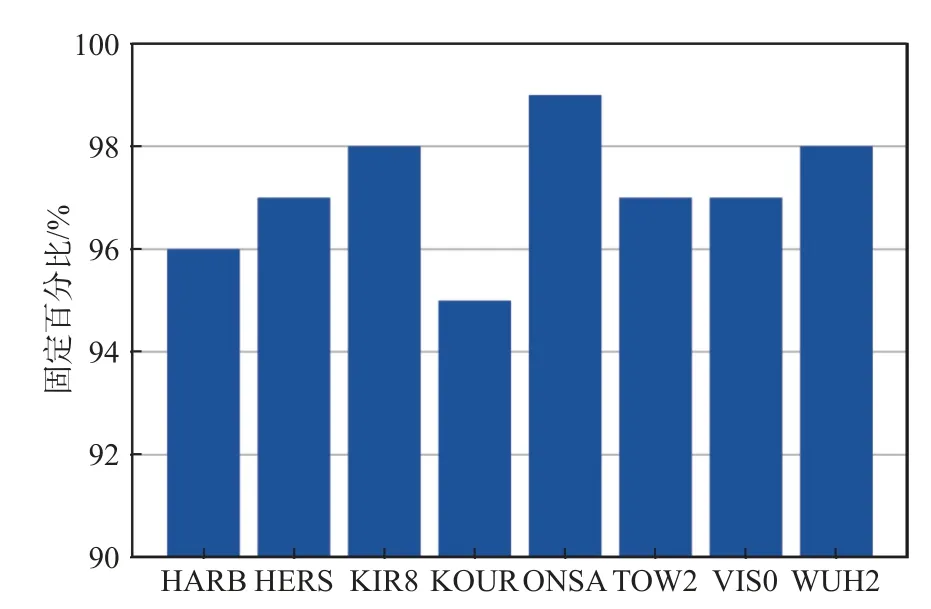
图8 BDS-3 PPP 固定解的固定百分比统计
进一步统计了收敛后BDS-3 PPP 定位结果各测站E、N、U 三个方向上的平均均方根(RMS),作为比较同时统计了GPS PPP 三个方向上的平均RMS,统计结果如表3所示.由表3可知,BDS-3 PPP 浮点解的结果优于3 cm,固定解的结果优于2 cm.所有测站E、N、U 三个方向上浮点解的平均RMS 分别为1.4 cm、1.0 cm、1.6 cm,固定解三个方向上的平均RMS 为0.9 cm、0.7 cm、1.4 cm,较浮点解分别提高了35.2%、31.2%、17.6%.GPS PPP 浮点解5 个测站E、N、U 分量RMS 的平均值分别为0.9 cm、0.5 cm、1.7 cm,平面方向优于BDS-3,在高程方向略低于BDS-3 的定位结果.GPS PPP 高程方向统计结果略差是由KOUR 站定位误差偏大所致,可能是因为该测站GPS 观测数据质量较差.GPS 固定解三方向上的平均RMS 为0.6 cm、0.5 cm、1.1 cm,略优于BDS-3 PPP 固定解的结果.整体上看,无论是浮点解还是固定解,BDS-3 PPP 定位精度与GPS 相比大致相当,差异在2 cm 以内,大部分小于1 cm.研究时间段内精密星历BDS-3 仅有18 颗卫星,远小于GPS 的32 颗卫星.随着BDS-3 精密产品的卫星数不断增多,精度不断提高,其定位性能将得到进一步的提高和改善.
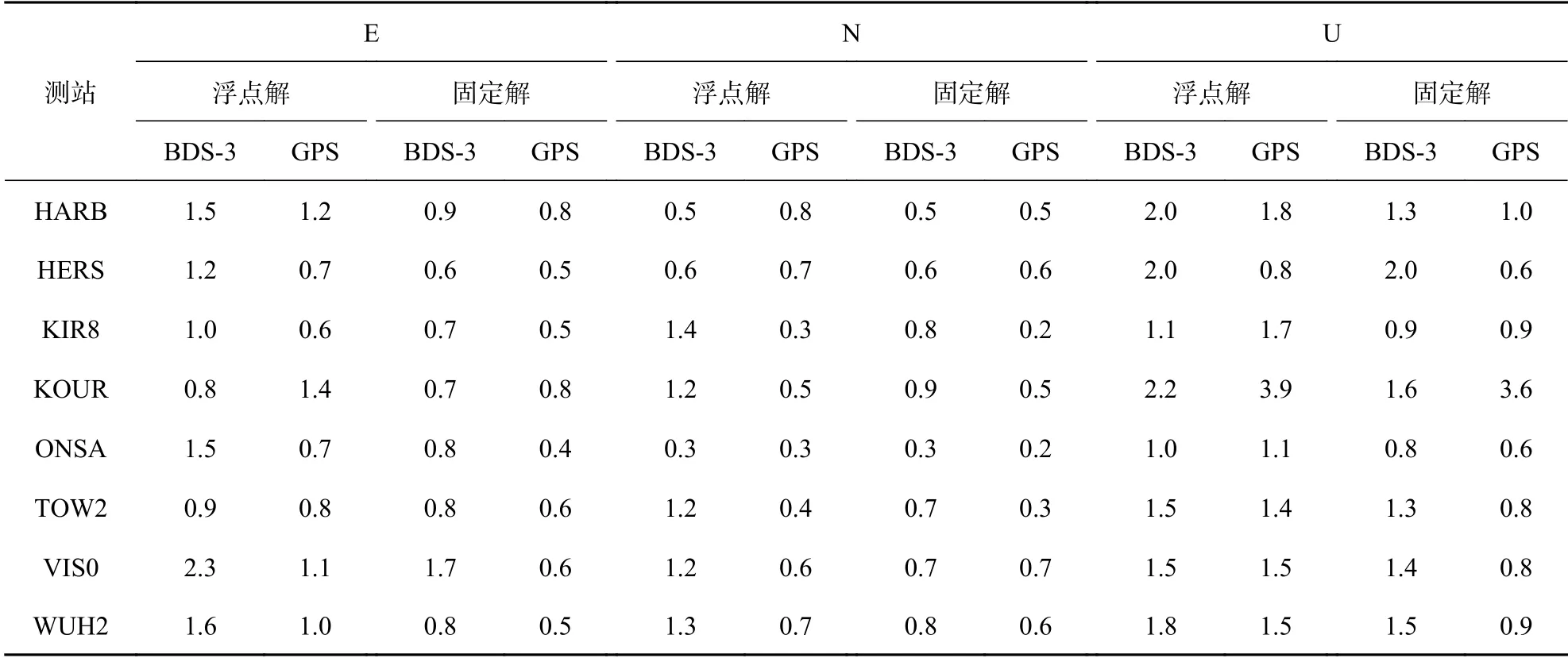
表3 BDS-3 PPP 和GPS PPP E、N、U 三个分量上的平均RMScm
4 结束语
本文基于MGEX 测站的观测数据,利用武汉大学IGS 分析中心发布的精密星历和钟差产品,进行BDS-3 UPD 估计,并分析评估了BDS-3 的定位性能.利用100 个全球分布的测站观测值对BDS-3 进行UPD 估计,结果显示BDS-3 WL UPD 和NL UPD 的平均标准差分别为0.025 周和0.026 周,精度满足PPP模糊度固定的要求.并以GPS PPP 为参考,进行了BDS-3 PPP 浮点解和固定解试验.结果表明:BDS-3 PPP 在E、N、U 三个方向上浮点解的平均RMS 分别为1.4 cm、1.0 cm、1.6 cm,通过固定解算法可将三个方向的精度分别提升至0.9 cm、0.7 cm、1.4 cm,BDS PPP 精度与GPS 大致相当,满足高精度定位要求.
致谢:感谢IGS-MGEX 提供的观测数据;感谢武汉大学IGS 分析中心提供的精密星历和钟差产品.