一种基于少通道准校正GNSS干扰信号的空间谱测向方法
2022-12-26马宝田郭述利刘少林
马宝田,郭述利,刘少林
(1.中国电波传播研究所,山东 青岛 266107;2.青岛大学,山东 青岛 266107)
0 引 言
伴随着一些国家和联盟研制出各自的卫星导航系统,给军事领域、民用的定位和测绘尤其是民航的安全提供了重要的保障.对全球卫星导航系统(GNSS)干扰信号的干扰也日益严重,及时排查相关干扰源变得更加迫切.导航干扰一般为同频干扰,针对该类干扰的定位查处,空间谱测向算法的应用较为广泛.研究者提出了多种不同的算法来实现空间谱测向,如多重信号分类(MUSIC)[1]、旋转子空间法(ESPRIT)[2]和最大似然估计(MLE)[3].空间谱测向算法是通过对不同天线接收到的数据进行处理,利用处理后的数据构造协方差矩阵,对得到的协方差矩阵做进一步运算,最终得到各个导航干扰信号源的来波方向和对应信号的相对强度.
SCHMIDT 等[4]在1979年提出的MUSIC 算法,即多重信号分类算法,是通过对接收到的数据矩阵进行特征分解,根据特征值的大小将观测空间分为信号子空间和噪声子空间,这两个子空间相互正交.其中,阵列接收数据的协方差矩阵中的较大特征值对应的特征向量构成信号子空间,噪声子空间则由阵列接收数据的协方差矩阵中较小特征值对应的特征向量组成.由于信号子空间和噪声子空间相互正交,可以通过计算谱图,从谱图中估计信号的参数.但是该算法的使用条件比较苛刻,入射信号互不相干是使用该算法的前提[5].天线阵列的平移不变性导致的信号子空间的旋转不变性是ESPRIT 算法进行波达方向估计的前提,该算法可以直接利用得到的特征值来获取信号的参数,然而多数天线阵列并不具有平移不变性[6].MLE 算法通过对协方差矩阵进行拟合,根据得到的结果实现面向数据的体系结构(DOA)的估计,计算量大,测向速度慢是该算法的缺点[7].
用于接收导航干扰信号的接收机通常被叫做“通道”.针对频段位于L、S 频段的导航干扰信号,接收天线的信号不能被AD 采样直接转化为数据,需要把接收到的高频信号经过信号调制转换为低频的IQ 数据.在此期间,对任意的两个天线接收的数据计算协方差,其协方差都能保持不变[8].测向精度高是多天线圆阵的优点,如五天线阵元的圆阵.接收机的数量过多将导致产品过重、增加了成本且无法应用到小型无人机,因此少接收机对多天线成为了可能.本文提供了一种少通道、准校正的导航干扰信号空间谱测向方案,以实现低成本、低运算量、低复杂度、高精度的测向.
1 空间谱估计算法数学模型
假设M个相同的全方位天线阵元均匀分布在平面XYZ一个以原点为圆心、半径为R的圆周上,有N个导航干扰信号入射到圆阵上(图中只画了一个).如图1所示,方位角θ 为入射导航干扰信号在平面XYZ的投影与X正半轴之间的夹角,俯仰角Φ 为入射导航干扰信号与平面XYZ的法线的夹角.
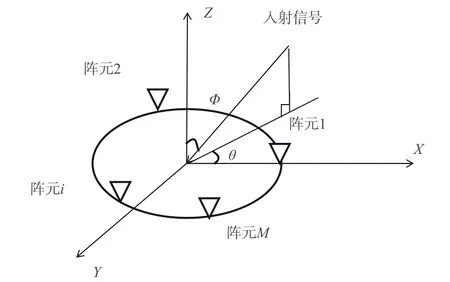
图1 均匀圆阵的阵列结构模型
在第t次快拍接收的数据矢量为

式中:X(t)是M*K维的阵列输出数据;S(t)是N*K维的入射导航干扰信号的数据;N(t)是M*K的高斯噪声的数据矢量;A(θ)是M*N的导向矢量矩阵,K为采样点数.

a(θi)可以表示为
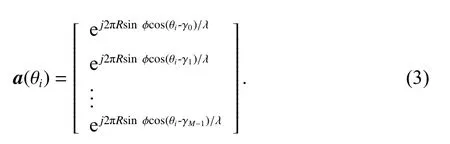
式中:γn=2πn/M,n=0,1,···,M-1;R为半径;λ 为信号波长.
对应接收数据的协方差矩阵为

式中:Rs是入射导航干扰信号的协方差矩阵;RN为噪声的协方差矩阵.在白噪声存在的环境中,对式(4)的协方差矩阵进行特征分解,可得特征值λ1≥λ2≥···>λM,则由大特征值对应的特征矢量构成信号子空间Es∈CM×N,而对应小特征值的特征矢量组成噪声子空间EN∈CM×(M-N)[9].
2 少通道空间谱测向方案
在设计干涉仪测向方案时,通道通常被设计为全通道数(即天线阵子数与通道数相同)或是少通道数(即天线阵子数少于通道数).根据设置的通道数,干涉仪可以分为单通道干涉仪、双通道干涉仪、三通道干涉仪、五通道干涉仪和九通道干涉仪等.对于空间谱测向,受信号相关性影响,一般选用全通道测向方式,但其成本高、系统复杂.而少通道方案减少了接收机的数目,降低了计算复杂度,这使得少通道方案越来越得到重视.以五阵元测向天线阵为例,根据不同的开关搭配,系统可以设计为双通道测向、三通道测向和五通道测向,如图2所示.

图2 五阵元三通道测向方案示意图
在构建多元天线阵同时接收的测向系统,传统处理方式往往采用天线数与通道数相同的方法,在多通道的信号采样时,才能不额外的增加时域和空域的接收误差,为构造特征向量、特征子空间和搜索谱峰提供更为真实、可靠的目标信息.采用全通道的方案虽然接收的数据比较准确,但是用于测向的设备体积也会相应的增大,而导致系统更为复杂、价格更为昂贵,为了解决这一矛盾,提出了改进的协方差矩阵的构建和少通道接收的方法.
在少通道空间谱测向的系统中,为了保证接收到的目标信息有足够的测向精度,用于测向的天线阵元数目并没有减少,只是减少了接收机的数量,通过射频开关轮流切换的方式来实现少通道的完整的数据的接收.如图3所示,N个天线阵元同时接收入射的导航干扰信号,根据天线的数目N和接收机的数目P,分时段对射频开关按照一定规律接通,对接收到的数据进行后续处理,经过一个轮换周期就能够构造出整个接收阵列的协方差矩阵.本文的空间谱测向方案采用的是五阵元三通道和五阵元五通道.
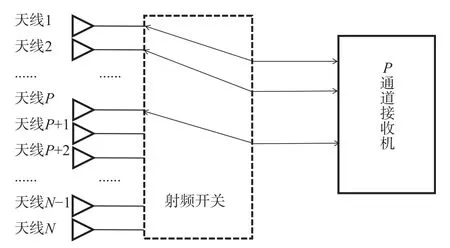
图3 少通道系统采用的切刀轮换
五阵元三通道切刀轮换方案如表1所示.
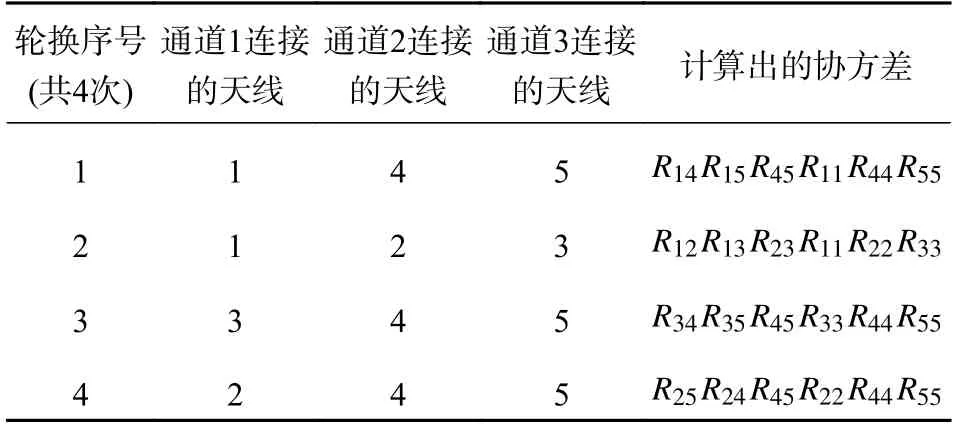
表1 五阵元三通道仿真轮换方案
按照轮换次序,计算出每个次序不同天线组合组成的协方差.
3 准校正分析
在计算协方差矩阵的过程中,由于通道之间存在相位误差,使用校准源尽可能准确的计算出通道间的相位误差,减小通道间相位误差的影响.
在t时刻,通过射频开关将接收机通道与阵元1、2、3 接通,此时阵列接收信号为

并有:

式中:K为采样点数;φ12为一通道和二通道的相位差;φ1、φ2分别为一通道和二通道的初始相位.同理,可以得到r13、r22、r23、r33,由于协方差矩阵R1是共轭对称的,可以得到:

在构成R1时,只需要构成其上三角矩阵即可.

按照不同的组合方式,可以得到整个阵列的协方差矩阵R中的每一个元素,将每一个轮换中所有得到的rij(i≤j,i=1,2,···,5)加权取平均,就可以构造出整个阵列接收信号的协方差矩阵,对所得到的协方差矩阵进行特征分解,分解出信号子空间和噪声子空间,从谱图中提取DOA.当入射的导航干扰信号是平稳过程的时候,通过切换开关来重新构建协方差矩阵,少通道的方案与全通道的方案具有相同的空间谱测向能力.
图4所示为三个信号存在的情况下,五阵元五通道(蓝色)和五阵元三通道(黑色)采用MUSIC 算法的仿真效果.根据仿真结果可以看出三通道和五通道测向效果基本一致,因此MUSIC 算法可以实现少通道的导航干扰信号空间谱测向;不能区分相干信号是该算法的缺点.
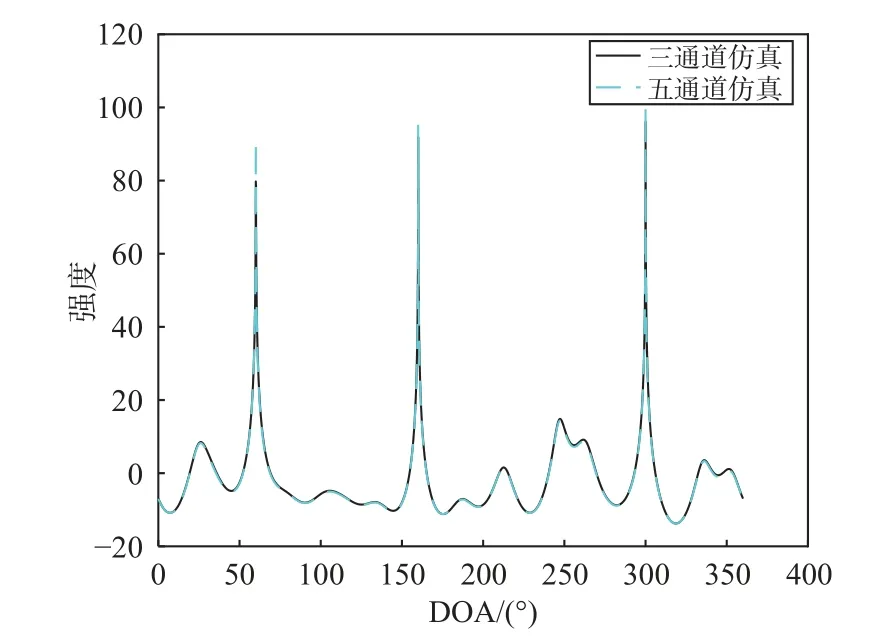
图4 五通道和三通道MUSIC 算法测向对比结果
4 实验验证与结果分析
为了检验方案的可行性和测向精度,测试人员选择的天线阵子孔径为200 mm,测试频段为1 156 MHz~1 289 MHz、1 553 MHz~1 610 MHz,图5~6 以五阵元三通道在测试场地内进行测试,通过改变测试设备的高度、信号的入射角度、信号的数量和信号的频率对所提的方案进行验证.

图5 实验场地鸟瞰图
为验证方法的实际效果,针对五阵元三通道测向系统,分别针对单信号、双信号及三信号三种情况在不同信噪比(SNR)条件下进行测试.选取0°~360°若干个角度作为入射导航干扰信号的角度,对得到的测向偏差取均值,得到测向偏差与SNR 的关系,如图7所示.

图6 试验场地实物图

图7 单信号不同SNR 下的测向偏差
选取若干对信号作为导航干扰信号,其中信号1 的角度与信号2 的角度差值为60°,对得到的测向偏差取均值,获得两信号的测向偏差与SNR 的关系,如图8所示.
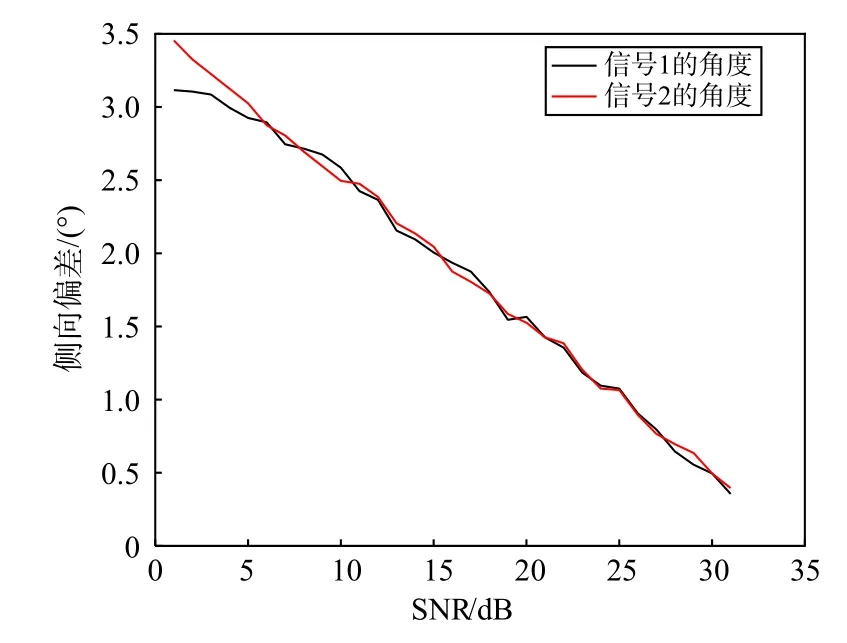
图8 双信号不同SNR 下的测向偏差(两信号的入射角度相差60°)
选取多个信号1 的角度、信号2 的角度和信号3 的角度,三个信号的入射角度接近(角度差约为20°~30°),对多次测向结果的偏差取平均,得到三个入射信号的测向偏差与SNR 的关系,如图9所示.
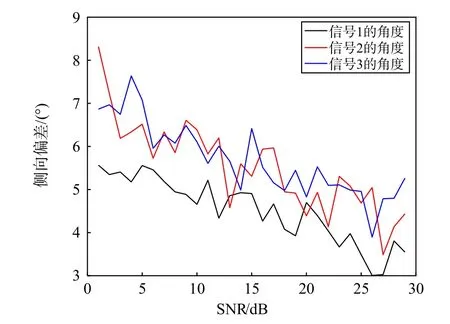
图9 三信号不同SNR 下的测向偏差
根据图7~8 所示的测向偏差和SNR 的关系,可以得出对于单信号和双信号而言,测向偏差随着SNR 的增大而减小,在较低SNR 的情况下,测向误差在3.5°左右,相比于干涉仪,降低了对SNR 的要求.五阵元三通道的设计方案可以实现单信号和双信号在误差允许范围内的非相干信号的测向.如图9所示,当入射信号为三个且入射信号的入射角度相近的时候,由于信号之间的相互干扰增加,导致对三个入射信号的角度分辨能力下降,在低SNR 的情况,测向误差相比于单信号和双信号的情况增加到8°~9°,测向误差恶化,可以通过增加阵元数目即通过七阵元、九阵元等来提高测向精度,实现三个入射导航干扰信号的精准测向;该方案针对单信号和双信号的测向精度较高,与全通道的测向性能基本一致.
5 结束语
本文的创新性在于提出了基于通道修正来减小通道间相位差的影响的方案,实现了少通道的空间谱测向的方法,既降低了对通道间相位差估计的运算量,又减小了相位差的估计误差对测向精度的影响.综合实验数据,对于多个同频信号或非相干信号共存的情况,通过对GNSS 干扰信号的分析,在低SNR 的条件下,针对两个及以下信号的测向误差能够达到3.5°左右,该方案也能在误差容许范围内完成精准测向.随着通道数目的减少,设备的体积相应减小,但其性能并未大幅降低,应用场景更为广泛,为GNSS 干扰信号的空间谱测向提供了一种新的方案.