基于网格划分的ADS‑B 地面站信号覆盖及选址分析
2022-12-25汤新民胡钰明陈强超
汤新民,张 颖,胡钰明,陈强超
(1.南京航空航天大学民航学院,南京 211106;2.中国民航大学交通科学与工程学院,天津 300300;3.中南民航空管通信网络科技有限公司,广州 510080;4.中国民用航空中南地区空中交通管理局,广州 510080)
随着通用航空在工业、农业、建筑业及交通等众多领域的应用日益普遍,通用航空的飞行安全技术保障手段相对匮乏,其安全监视问题不容忽视,完善通用航空的安全监视体系已经成为目前深化低空空域改革的重要举措之一。由于通用航空的活动范围通常为真高1 000 m 或标高3 000 m 以下,受地形及地面障碍物的影响更大,要求低空空域监视服务系统具有更高的精度及监视冗余能力。广播式自动相关监视(Automatic dependent sur‑veillance‑broadcast,ADS‑B)作为未来的主要监视技术,能够满足投资成本低、覆盖范围大的要求,在确保飞行安全方面发挥重要作用[1‑2]。在不同的地形条件下,ADS‑B 地面站的信号覆盖范围存在差异,当观察目标为通用航空飞行器时,不仅需要知道地面站对任意高度层的通视情况,还要知道地面站对任意真实高度的通视情况,同时区域内合理的规划布局能够提高ADS‑B 地面站的监视精度和准确性[3]。
ADS‑B 地面站信号覆盖范围受地形地貌影响,尤其在视距波分析过程中,地球曲率和地形遮蔽对信号传输具有较大影响[4‑6]。同时结合地理高程数据和天线模型计算空间传播下的ADS‑B 视线截止距离,获得信号覆盖范围。文献[7]通过地理数据模型和传输衰减模型,结合实际地形状况进行无线覆盖分析,但是该模型主要针对城市地区以及高空飞行的情况。文献[8]提出了一种将复杂的三维计算简化为二维剖面的新的覆盖分析方法,为信号覆盖的发展带来了新的思路。文献[9]结合地理高程数据(Digital elevation model,DEM)地形和电磁波理论,对空间传播下的ADS‑B 视线截止距离进行计算,提出了提高基站信号覆盖的方法。基于地面站的信号覆盖范围,可以在区域内进行规划布局。目前对ADS‑B 地面站选址的研究相对较少,其布局研究与通信基站的选址类似,常用的方法包括 栅 格 法[10]、启 发 式 优 化 算 法[11]及 最 大 覆 盖 模型[12‑13]等,不同之处在于要考虑到地形及航空器超障高度等因素对选址的影响。
但是目前关于ADS‑B 地面站信号覆盖范围的分析,大多是某一基站对选定高度层的信号监视范围计算,不完全适用于低空条件下的复杂地形环境。地形的变化会直接影响到飞行器的飞行方向、速度和飞行姿态等,因此针对通用航空的监视需求,本文提出一种基于网格划分的ADS‑B 地面站真高信号监视覆盖范围分析方法并进行选址分析,以期为ADS‑B 地面站布局规划的相关需求提供参考。
1 通视距离影响因素
1.1 地球曲率对可视距离的影响
ADS‑B 天线的传播方式为视距传播,受地球曲率影响较大。认为地球模型是球体,视线传播会被凸起的地表阻挡,导致空间波传播存在一个最大直视距离,该最大直视距离通过视距传播模型计算,如图1 所示。
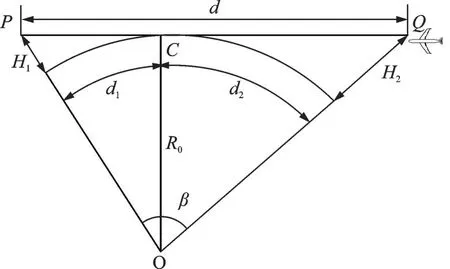
图1 视距传播模型Fig.1 Sight distance propagation model
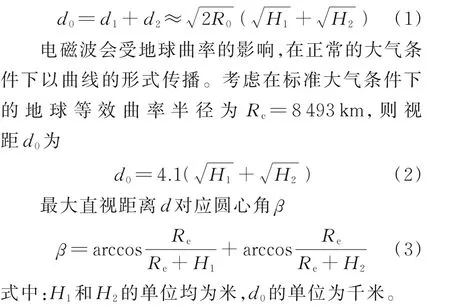
若地球半径为R0,天线及接收机所在高度分别为H1和H2,两点的连线与地表相切于反射点C点,d0=d1+d2即为地球曲率因素影响下的最大直视距离。地球半径R0远大于天线和接收机的高度H1和H2,由几何关系可得
1.2 地形遮蔽对通视距离的影响
遮蔽角是指地面站天线和关键点之间的连线与地平线之间的夹角,是能够发现某一方位上探测目标的最小角度,可以作为判定视点与目标点是否通视的依据[14]。以ADS‑B 地面站周围每个山顶作为通视分析关键点,将飞机所处位置与地面站之间连线和水平线的夹角作为测量角度,该连线可能在水平面以上或以下。设向上为正,向下为负,分为以下2 种情况讨论。
(1)当遮蔽角为正时,沿ADS‑B 地面站接收天线与关键点顶端做一条射线,该射线与水平面夹角为θci(i=1,2,…),即为遮蔽角,在山峰后面会形成一个盲区,当飞机与地面站连线和水平面的夹角小于遮蔽角,目标被遮挡无法被发现。如图2 所示,虚线表示地面一定真高。对应A处真高的飞机,其与地面站连线未被任何地形遮挡,信号可以被地面站接收;对于B处真高的飞机,其与地面站连线虽未被关键点①遮挡,但被关键点②遮挡,测量角度小于关键点②处遮蔽角θc2,信号同样无法被地面站接收。

图2 遮蔽角为正值时信号覆盖盲区Fig.2 Blind area when the shielding angle is positive
(2)当遮蔽角为负时,遮蔽角为θcj(j=1,2,…),当飞机与地面站连线和水平面的夹角的大小大于遮蔽角,目标被遮挡无法被发现。如图3所示,对应A'处真高的飞机测量角度大于关键点①处遮蔽角θc1,其位于ADS‑B 地面站的真高信号覆盖盲区。B'较A'位置远,但信号未被地形遮挡。

图3 遮蔽角为负值时信号覆盖盲区Fig.3 Blind area when the shielding angle is negative
针对真高的遮蔽情况,本文采用在确定真高的前提下,对空域进行网格划分,计算每个网格对应的遮蔽角,比较飞机所处位置对应测量角度与遮蔽角的大小关系,判断是否通视。对任意高度层,高度层认为是一个平面,ADS‑B 地面站的监视信号覆盖范围为一段连续区域。而对任意真实高度层,高度层随地形变化,地面站的监视信号覆盖范围可能由多段不连续区域共同构成。
2 覆盖范围分析
2.1 数字高程插值
在地理信息系统中,大多用DEM 表示地形特征。DEM 数据以规则网格形式采样与存储,本文采用经改进形成的ASTER GDEM V2 版数据,其每个单元覆盖1°×1°的地理范围,以此对起伏地形环境进行建模更接近真实地理形态。DEM 是地球表面地形状态的离散化表达,只存储了网格点的高程数据,高程点数据不总是完全的,加上通用航空的飞行活动在低空空域中进行,对精度要求更高,对于样本点不是网格点的,需要通过已知高程值内插等高线,以形成光滑的曲线,能够更加精确的反映地形起伏情况。
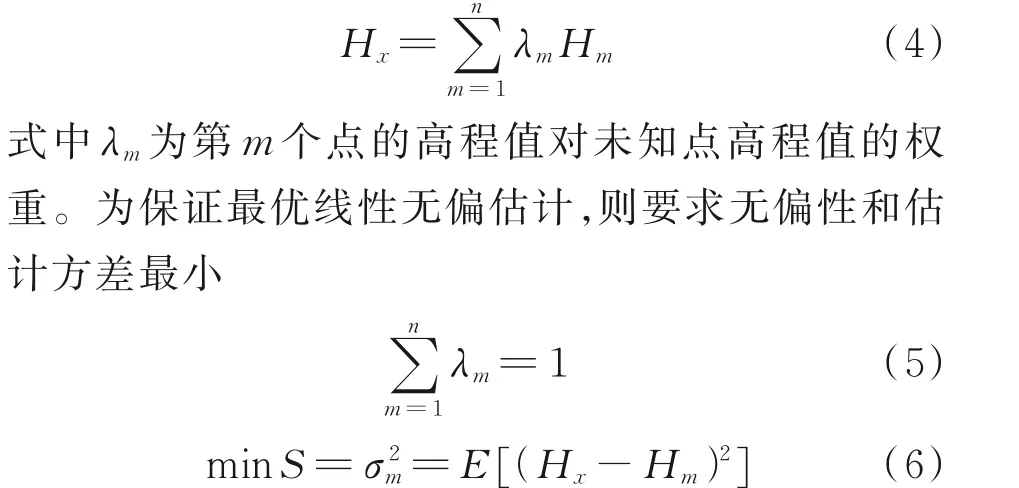
常用的高程内插算法包括线性内插、样条函数内插,克里金内插法、双线性内插等,考虑到区域内高程数据具有空间相关性,本文采用克里金(Krig‑ing)插值法。
假定把数字高程模型分成若干单元,待插值点所在单元内的n个已知点的高程值为Hm(m=1,2,…,n),则未知点x处的高程值为
2.2 网格编码
空域网格化方法可实现空域的精细化处理。本文基于网格划分计算每个ADS‑B 地面站的覆盖范围。首先需要对目标空域进行网格化处理。网格化分析方法的思想是把目标区域划分为一系列网格,每个网格对应一个特定的空间位置,最常见的是划分为大小相同的正方形网格,每个网格包含经度、纬度和高程信息,用网格中心点表示该网格区域。步骤如下:
(1)确定目标空域网格范围:确定目标低空空域范围,通过墨卡托投影将空域范围转换为直角坐标表示;
(2)网格划分:确定空域网格的单位长度,将目标空域分为大小一致的网格,网格大小直接影响结果可靠性;
(3)网格编码:用每个网格的中心点表示该网格区域并进行编码。网格编码常见的有2 种方法,即编号法和坐标系法,每个网格对应唯一的表达形式。这里采用直角坐标来表示网格。
2.3 区域任意目标点通视性计算
Xdraw 算法是离散的可视域分析算法,以观察点为中心从内到外逐层扩散,每一点都有与之对应的遮蔽角[15]。当要对第i环格点可视性进行计算时,将其遮蔽角与第i-1 环进行比较,计算每个网格的可视性,最终得到不同地形条件下的可视区域,即可视域。如图4 所示为Xdraw 算法示意图。

图4 Xdraw 算法示意图Fig.4 Schematic diagram of Xdraw algorithm
当选定ADS‑B 地面站位置时,以地面站作为观察点中心,采用Xdraw 算法进行分析。通视分析示意图如图5 所示。V表示地面站位置,T'为飞行器位置,取二者之间的连线作为分析方位,将连线进行等间距采样,即划分网格,并获得每个采样点的高程,对于高程值未知的点则通过插值法获得,同时每个采样点对应一个遮蔽角。
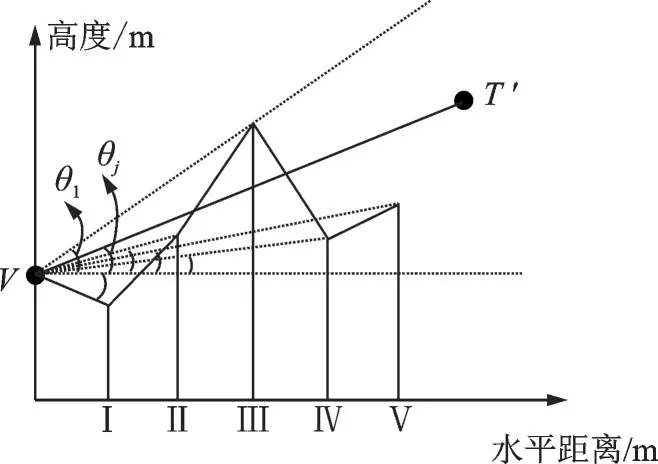
图5 通视分析示意图Fig.5 Schematic diagram of visibility analysis

每个网格对应飞行器处于任意真实高度的测量角度为

比较θi和θj确定网格的可视性。如图5 所示,二者之间的测量角度为θj,每个采样点对应的遮蔽角中,θ1为该方向上的最大遮蔽角,由于θj<θ1,T´虽然不受采样点Ⅳ、Ⅴ的遮蔽,但被采样点Ⅲ处地形遮蔽,同样处于地面站V 的监视盲区。利用相同方法依次对所有方位的所有网格点进行判别,得到所有样点的可视信息,直至扩散半径达到最大直视距离,算法停止,最终得到不同方位的ADS‑B 视线截止距离,计算出每个地面站的覆盖矩阵。
3 ADS‑B 布局模型建立
3.1 ADS‑B 布局原则
地面站部署的最终目的是通过尽量少的地面站数量,实现低空空域的监视信号覆盖范围最大化,尽可能减少信号盲区,同时具备适当的冗余覆盖。在确定不同位置ADS‑B 地面站的覆盖范围前提下,根据目标空域的监视范围要求,综合度量各地面站的监视性能,分析地面站部署的优先顺序进行规划布局。因此,ADS‑B 地面站选址应满足以下基本原则:
(1)ADS‑B 地面站的监视范围应当考虑空中交通管制的需要,适应机场、航路的发展规划。
(2)在满足监视需求的情况下,地面站数量应尽可能少,同时又要考虑到地面站分布位置的均衡性。
(3)ADS‑B 地面站监视覆盖面积最大化,保证良好的监视效果。
(4)适当的冗余覆盖能够确保同一架航空器可以被不同的地面站监视到,提高目标定位的精度,多地面站的监视能够在一定程度上避免单地面站接收报文出现分析错误的情况。
3.2 数学模型建立
ADS‑B 地面站部署的主要目的是通过部署尽可能少的地面站数量,减少覆盖盲区,使覆盖空域面积最大,因此在满足全覆盖要求的情况下,以地面站数目最少为优化目标,可以采用集合覆盖模型来解决这一问题,对模型中涉及到的集合、参数和决策变量的定义为:G表示被划分为M行N列的空域网格集合;K表示可以建设ADS‑B 地面站的候选点集合;fij(k)表示地面站k对网格gij的可视情况,其中1 表示可视,0 表示不可视;Ωij={k|fij(k)=1}表示能够满足覆盖网格gij的地面站选址

式(10)为覆盖模型的目标函数,优化目标为ADS‑B 地面站的选址数量最少;约束(11)保证若网格gij被地面站覆盖,则该网格满足至少被ADS‑B 地面站覆盖一次;约束(12)保证决策变量为0‑1 变量。
通过地面站的覆盖性分析,得到每个地面站选址候选点的覆盖矩阵Dk。为方便求解,对覆盖矩阵进行转换:
(1)将M×N维矩阵Dk转换为1 行M×N列的矩阵D'k

2)以地面站选址候选点为横行,以空域网格为纵列,将选址候选点的覆盖矩阵转化为候选点总体覆盖矩阵D'

4 仿真验证
真实高度和高度层为150、300 和600 m 的监视信号覆盖情况。由仿真结果可以看出,地面站位置东西部地势差别较大,西侧的高地势对信号遮挡影响较大;对真高或指定高度层,同一地面站的信号覆盖范围随高度的上升而逐渐增大;对同样高度,真实高度与同高度的指定高度层覆盖范围相比,地面站对真实高度的覆盖范围较大,且对真高的覆盖范围为几段不连续区域的覆盖叠加,对某高度层的覆盖范围为一段连续区域,与实际情况相符。
World Wind Java是美国国家航空航天局(Nation‑al Aeronautics and Space Administration,NASA)提供的一个三维地理信息软件,该软件提供了完整的三维地理信息平台基础功能代码,为进行ADS‑B地面站的覆盖性分析带来了便利。基于World Wind 开源软件包开发ADS‑B 地面站覆盖性分析软件。为验证本文提出方法的正确性,选取湖北省地区作为ADS‑B 地面站信号覆盖范围的区域。
借助World Wind 三维地理信息系统,选取DEM 精度为90 m 的数据,单位网格间距为100 m,以ADS‑B 地面站为观察点中心,最大直视距离为半径,仿真同一地面站对不同高度层及真实高度的覆盖情况。选取湖北省内经度为111.537 9°、纬度为30.590 1°处设立地面站,该位置地理高程为140 m,现有移动通信铁塔高度为50 m,认为天线的海拔高度为190 m,对该位置进行分析,得到的信号覆盖范围示意图如图6~8 所示。
图6~8 选择同一位置地面站,分别模拟了对

图6 高度150 m 的信号覆盖范围Fig.6 Ground station signal coverage at the 150 m height
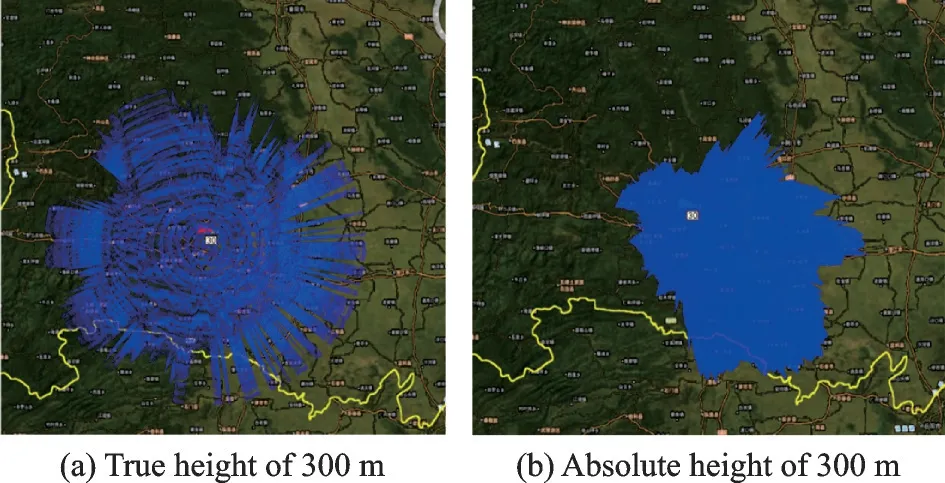
图7 高度300 m 的信号覆盖范围Fig.7 Ground station signal coverage at the 300 m height

图8 高度600 m 的信号覆盖范围Fig.8 Ground station signal coverage at the 600 m height
考虑到湖北省的地势高低相差悬殊,为了便于分析,基于湖北省的地势特点,本文将湖北省以东经112°为界限,将湖北省划分为东、西两部分进行分析。对于湖北省西部地区,地势较高且较为复杂,需要更多数量的地面站保证最大范围的信号覆盖;对于湖北省东部地区,地势较为平坦,单个地面站的覆盖范围较西部大,所需地面站数量较东部少。由于最大覆盖模型有无限多个候选点,求解存在一定难度,首先需要对候选点进行预处理。由于地面站部署位置越高,覆盖范围越大,因此本文以西部地区为0.5°×0.5°的大小、东部地区为0.25°×0.25°的大小,将湖北省区域进行网格划分。将地面站部署在湖北省现有信号铁塔上,考虑地理高程和地面站天线高度,筛选出每个网格中海拔高度最高的铁塔位置作为地面站部署的候选位置。
本文以实现湖北省真实高度600 m 的全覆盖为监视需求。首先通过WorldWind 平台,计算每个地面站对真高600 m 的覆盖矩阵。LINGO 软件作为专业的优化模型求解软件,适用于求解整数规划问题,利用LINGO 软件对文中的最大覆盖模型进行求解。
仿真结果表明最佳目标函数值为32,即考虑湖北省初步规划包括站点6、11、14 等在内的32 个地面站。通过WorldWind 平台对该地面站组网的信号覆盖范围进行仿真,其中湖北省真实高度为150、300 和600 m 的信号覆盖情况分别如图9~11所示。

图9 地面站组网对150 m 真实高度的覆盖范围Fig.9 Coverage of ground station network at the true height of 150 m
仿真结果表明,本文选择的地面站位置能够基本实现湖北省对真实高度600 m 的全域覆盖,且包含一定的覆盖冗余。地面站的监视信号覆盖范围与湖北省的地势特点有较大关系,低平的中间区域地面站覆盖范围较为连续,部署数量较少,地势复杂的西部山区需更多的地面站实现更大范围的监视信号覆盖,满足地面站部署的基本原则。

图10 地面站组网对300 m 真实高度的覆盖范围Fig.10 Coverage of ground station network at the true height of 300 m

图11 地面站组网对600 m 真实高度的覆盖范围Fig.11 Coverage of ground station network at the true height of 600 m
5 结 论
地面站信号覆盖范围分析及选址研究可应用于航路和飞行扇区安全评估等场景,是完善通用航空监视服务体系的重要内容之一。本文以湖北省地区为例,基于信号覆盖影响因素理论及网格化处理方法,在WorldWind 平台开发了地面站信号覆盖范围分析系统,计算地面站对不同高度情况下的监视信号覆盖范围。通过将地面站对指定高度层与真实高度的信号覆盖范围进行对比,验证了算法的可行性,提出了地面站布局规划的原则和部署模型,基于地面站对真实高度的监视覆盖矩阵确定了布局方案。针对湖北地区进行地面站选址工作,对于通用航空的低空飞行具有较好的实用性,可为进行通用航空的航路规划提供参考和依据。