喷浆机器人自适应喷涂路径规划研究
2022-12-24徐剑安贾连辉荆留杰李光朋任月晓李开放
徐剑安,贾连辉,荆留杰,李光朋,任月晓,李开放
(中铁工程装备集团有限公司,河南 郑州 450016)
0 引言
随着中国综合国力的提升,近15年来,中国铁路隧道发展极为迅速,共建成铁路隧道9 260座,总长约15 316 km(占中国铁路隧道总长度的78%)[1]。但是隧道建设中地质条件复杂、施工环境恶劣及降效问题与人口红利退散矛盾日渐突出。支护作为隧道施工的关键一环,直接影响隧道安全,而喷浆是支护工序中保证支护强度及质量的重要环节[2-3]。在当前矛盾下,增加支护作业喷浆操作人员已无法满足可持续降低成本和隧道建设高质量、高标准的客观需求,发展隧道喷浆智能化装备是解决矛盾的根本途径。
混凝土喷浆工艺作为喷浆作业基础,决定隧道喷浆装备发展方向。从干喷到湿喷的发展过程,大幅提升了支护工程质量和支护结构可靠性,湿喷工艺改良推动了喷浆装备机械化、智能化进程,为喷浆装备研发工作者提供了新的思路[4-8]。由于喷浆工艺的改进,国内外针对喷浆装备研究经历了从侧重控制算法到逐渐偏向感知与规划技术上。国外自20世纪60年代起步入装备机械化时代,早期各国已对关节型机械深入研究,将喷浆机械手分数阶模糊比例积分控制跟踪方法、自适应分数阶PID算法应用于喷浆机械手臂控制,以做到精准的机械化过程控制。文献[9-12]在三维定位系统以及传感器数据采集技术基础上提出实时调整喷射轨迹来控制喷射质量的方法,极大地提高了喷射作业的效率和质量,为智能化喷浆机器人提供了新思路。国内在20世纪60年代由水利、冶金等部门牵头,历经60年发展,对国外技术兼收并蓄,从控制算法、实时感知与规划、泵送调节3个方面进行突破:张新荣等[13]对机械臂运动学与动力学进行研究,改善了喷浆机械手的控制精度;韩斌等[14]将ANN-PSO-GA模型应用在湿喷混凝土强度预测及配合比优化中,改善了湿喷设备在泵送调节方面的智能化升级;刘在政等[15]提出了喷射路径规划方法,结合感知端对不同区域超欠挖情况的获取结果,对喷射量参数动态控制做到感知与规划。以上研究成果为国内企业以喷浆设备为核心的配套产品提供了技术支持。
工业物联网、人工智能、大数据等新兴技术的发展,有效推动了喷浆机械手向数字化、智能化的方向发展,喷浆作为支护的一个重要环节,也面临环境精确感知难、喷涂效果评价难、喷涂路径规划复杂3大重点难题。本文在分析混凝土喷浆技术行业现状和痛点的基础上,研究混凝土喷浆设备感知识别关键技术,设计一种隧道岩壁特征物识别方法,实现钢拱架位置的精确感知;针对自适应开挖轮廓的喷涂区域规划关键技术进行研究,提出一种单拱架单片段喷涂区域辐角规划,基于拱架识别的多拱架复合区域规划和最优喷涂路径规划方法,以完成臂架的精准控制。
1 隧道混凝土喷浆技术痛点
近年来,高原隧道项目日渐增多。结合高原隧道环境施工特点,国内学者对钻爆法工法和钻爆法机械化配套设备在高原环境下的适应性开展了相关研究[16-19]。喷浆机器人作为支护环节重要配套设备,对施工安全起着关键作用。“科技引领、重视环境、安全智能”的规划理念对喷浆技术智能升级提出了更高要求,即需要围绕安全、高效喷浆作业为目标。喷浆机器人从机械化向智能化发展需要软硬件系统高可靠、地质环境的高自适应性与感知性、工序作业高耦合性[20]。要实现设备智能化,依据自主决策实现系统的自动化运行,整个智能化升级亟需解决以下问题。
1.1 复杂工况智能感知与识别
依据国内外施工经验,支护喷浆作业面拱架间距与数量、拱架类型(工字钢、花拱钢)以围岩等级为标准,灵活调整施工策略;同时,开挖断面轮廓也区分为全断面、一台阶和二台阶法,灵活复杂的现场工况对机器人感知端的感知效率和准确度提出更高要求[21]。智能感知是智能化升级的基础,作为喷浆机器人的“眼睛”,承担喷浆机器人对隧道环境及喷涂结果的数据获取任务,直观、高效、快速的感知手段是智能化升级所需要达到的指标。在感知端获取现场工况后,喷浆机器人需对不同工况进行识别,复杂的工况对应着庞大的数据特征库,感知终端上传原始数据,智能识别提取数据特征值并对比数据特种库,给出识别结果。整个流程的实现对准确率、运算速度提出更高的要求。
1.2 喷涂路径规划
喷涂路径规划路线的选择直接影响自动化喷涂过程中的回弹量、剥落量,决定喷涂的安全和稳定。现阶段主流喷涂路径规划分为4个喷涂驻足点进行喷涂,其中,喷射顺序不会因为工况改变而调整,但喷射距离、喷射角度和喷涂移动路线均会受到不同工况影响,进而影响喷涂效果。根据感知识别工况结果自适应规划喷涂路径是智能化道路上必须解决的问题[22]。
2 感知与路径规划技术研究
2.1 智能感知与识别
2.1.1 车体定位
三维扫描装置多次采集点云的过程中,每次扫描的点云数据都是基于台车坐标系,因此需要将所有获取的三维点云数据从台车坐标系转换到大地坐标系:
(1)

已知台车上的2点P1和P2在台车坐标系下的位置为BP1和BP2,全站仪测出在大地坐标系下的坐标为AP1和AP2。通过台车上安装的倾角仪测出台车坐标系相对于大地坐标系的前向倾斜角α和横向倾斜角β,通过已知的BP1、BP2、AP1、AP2、α和β求出
(2)
2.1.2 超欠挖检测
研究基于激光点云的隧道超欠挖检测方法,通过三维扫描装置多次设站扫描获取整个隧道的三维点云数据,通过全站仪将所有位置扫描的点云转换到同一大地坐标系下,运用投影法和RANSAC算法计算隧道的中轴线,提取隧道截面,将截面内点云转换到平面坐标系中,将各点到隧道截面圆心的距离与理论半径对比,获取隧道截面的超欠挖区域。实际轮廓与设计轮廓效果对比图如图1所示。点云与设计轮廓的距离
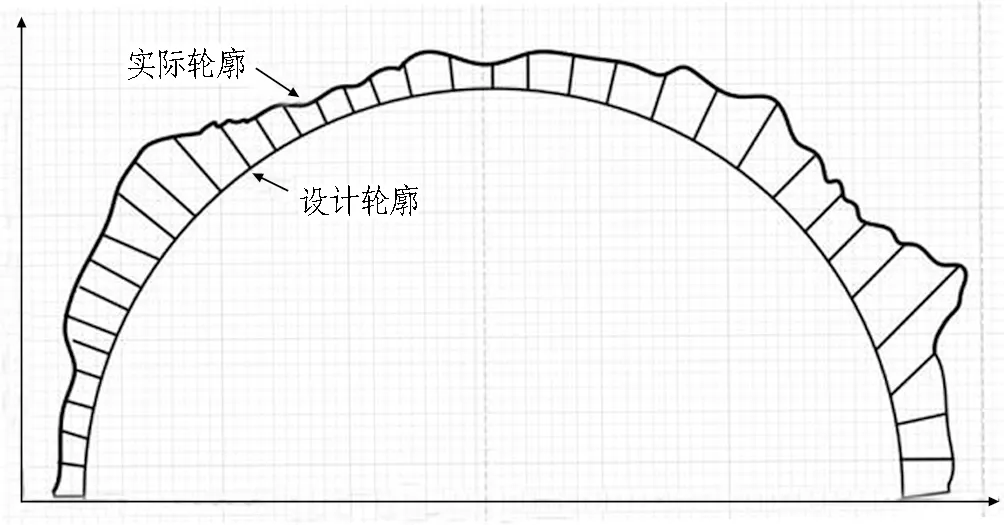
图1 实际轮廓与设计轮廓效果对比图
(3)
式中:xxoy和yxoy为实际隧道界面点云数据的坐标;xr和yr为隧道界面圆心;r0为隧道设计半径;d>0表示超挖,d<0表示欠挖。
实际轮廓线相邻2点A、B及A、B在设计轮廓线上的垂足近似1个直角梯形,超欠挖量就等于梯形面积:
(4)
(5)
式(4)—(5)中:dA、dB分别为实际轮廓上A、B两点到设计轮廓的距离;hCD为实际轮廓测量高度。
以此类推计算整体超欠挖量。
2.1.3 拱架识别
研究一种基于特征变换的隧道拱架点云自动提取识别的方法。获取立过拱架的隧道开挖面点云P,对点云P进行预处理和去冗余处理,得到消除冗余数据的隧道点云P2。
构建以开挖方向为X轴的空间坐标系CS,剔除隧道点云P2的地面点,获取不含隧道底部数据的隧道点云P3,将隧道点云P3所在的隧道点云坐标系记为原始隧道点云坐标系C0。计算原始隧道点云坐标系C0与空间直角坐标系CS之间的变换矩阵
T=C0-1CS。
(6)
根据所述变换矩阵T,将隧道点云P3变换为空间直角坐标系CS下的隧道点云P4。将隧道点云P4投影到以开挖方向为法向的平面上,得到平面直角坐标系下的二维隧道点云P5,并构建三维隧道点与二维隧道点之间的映射关系f1,见式(7)。
P5=f1(P4)。
(7)
统计二维隧道点云P5的点密度信息,选取n个密度区间,使用DBSCAN算法对二维隧道点云P5按照n个点密度区间依次由高到低进行自动聚类分割,得到若干个不同的点云子集{Si},i为点云子集的序号;然后,统计每个点云子集包含的点数,将点数最多的点云子集Sl作为隧道侧壁投影在平面上的点云。根据点云Sl拟合最优椭圆弧E,得到椭圆弧E的数学模型,采用椭圆圆弧的一般方程公式:
C1x2+C2y2+C3xy+C4x+C5y+C6=0。
(8)
以椭圆弧E为基准裁剪点云子集Sl,得到平面直角坐标系下的点云Sj。其中,线性规划的数学曲线为:
F(x,y)=C1x2+C2y2+C3xy+C4x+C5y+C6。
(9)
将点云Sj按照椭圆弧E展开为直线进行坐标变换,得到平面点云Sk,并构建点云坐标变换前后点的映射关系f2。根据映射关系f1和映射关系f2,得到点云Sk对应的深度信息,进而将点云Sk扩展为空间直角坐标系下的点云Pk。利用点云的地面滤波算法将点云Pk分割为隧道侧壁点云Ps和拱架点云Pg。根据拱架点云Pg采用聚类分割获取单个拱架点云Pmf(m为拱架的序号),然后根据变换矩阵T、映射关系f1和映射关系f2计算得到各个拱架点云在原始隧道点云坐标系C0下的坐标。
2.2 喷涂路径规划
2.2.1 自适应开挖轮廓的喷涂区域规划技术研究
随着地质变化,施工方为保证施工效率与安全,会适当调整开挖断面轮廓和立拱数目。为提高智能化喷浆机器人对不同地质岩层施工的适应性,需要合理调整其喷涂区域规划,以适应变化的开挖断面轮廓或立拱情况。
研究如何根据开挖断面轮廓来完成喷涂区域的规划。首先,对开挖轮廓做预处理,用参数描述多段圆弧或直线构成的轮廓;其次,对单拱架单片段轮廓进行辐角规划,确定该片段的N个喷涂子区域喷射辐角;最后,将由多拱架组成的完整待喷面划分成M个单一拱架,最后得到N×M个喷涂区域,其过程如图2所示。
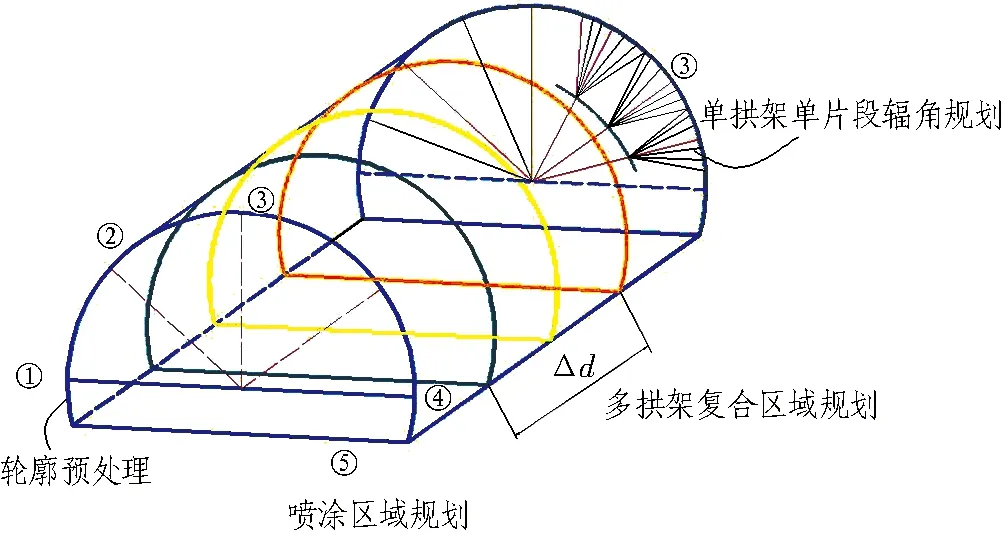
图2 自适应喷涂区域规划原理图
在系统导入的第三方.dp文件中,对轮廓的描述是分片段式的,如图3所示。片段按顺时针旋转,每个片段由起点坐标Ps、终点坐标Pe、曲率k、半径R、圆心O、起点辐角A1和终点辐角A2表示,即
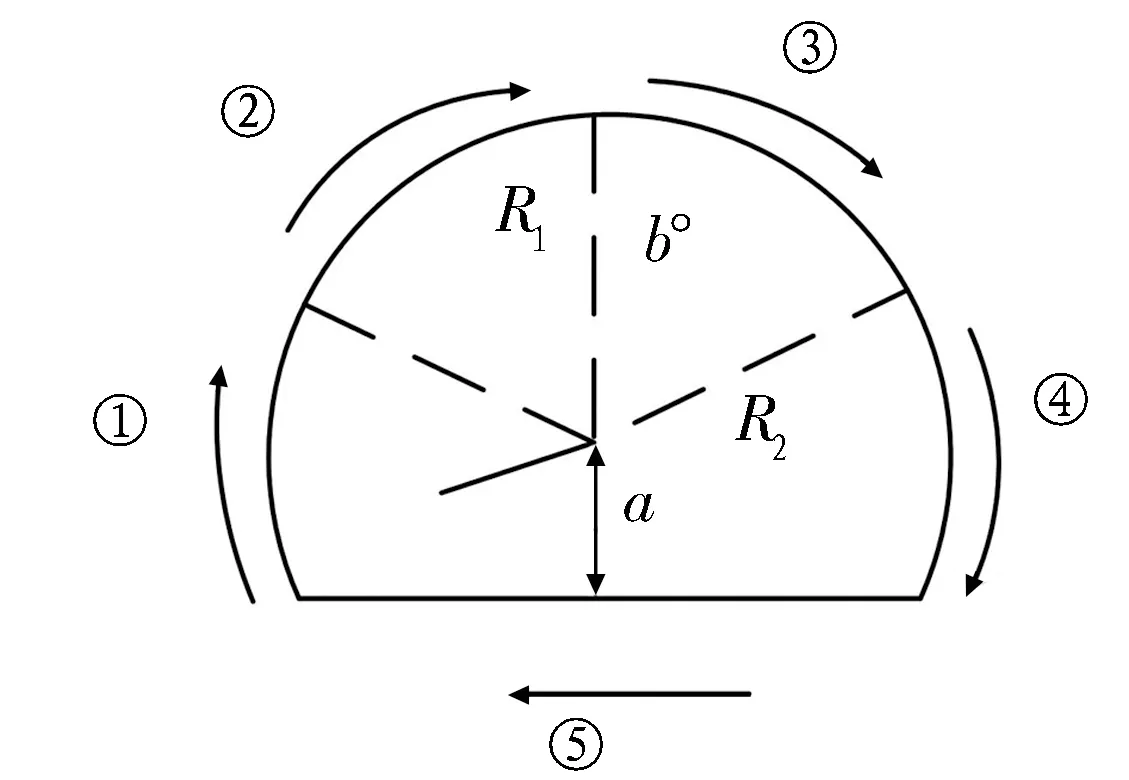
图3 片段式描述的开挖轮廓
seg=[Ps,Pe,k,R,O,A1,A2]。
(10)
2.2.1.1 单拱架单片段喷涂区域辐角规划
相邻喷涂区域会由于边界重叠造成喷涂时间和方量过多,导致边界区域喷涂厚度增加而不满足初步平整度要求,因此,需要合理规划每个喷涂区域Si的辐角范围Δα,使得相邻喷涂区域既紧密相接又不相互覆盖,如图4所示。
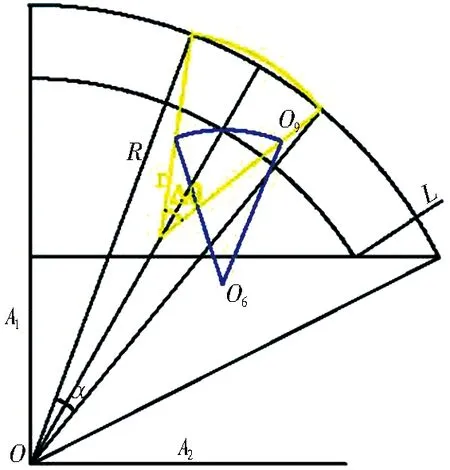
图4 喷涂区域辐角位置规划
在自动喷涂中,根据超欠挖量或目标涂层厚度的要求,在喷枪刷动速度和喷刷范围Δθ一定时,可通过调整喷枪到待喷面的距离l保证涂层厚度,提高作业效率。显然,喷枪距离l、喷刷范围Δθ影响相邻喷涂区域的边界,由此建立辐角范围Δα和喷枪距离l、喷刷范围Δθ的对应模型,即
α=f(l,Δθ)。
(11)
根据图4所示的几何关系,将喷枪回转中心近似为臂架末端中心,则可得到喷涂区域辐角模型
(12)
式中:r为喷枪长度;R为待喷轮廓片段半径。
当片段的起点和终点辐角分别为A1、A2时,则该片段的喷涂区域数目
N=round[(A1-A2)/α]。
(13)
则该片段内,喷嘴位置对应的辐角
βi=A1+α/2-iα。
(14)
此时对应的喷枪回转关节角度为:
θ7i=180°-βi;
(15)
θ8i=90°。
(16)
喷嘴位置
(17)
由此,可以由单片段参数、喷嘴辐角、喷嘴位置和喷枪回转角度来定义每个喷涂区域si:
(18)
对单拱架单片段来说,共有N个喷涂区域,记为
S=[s1,s2,s3,…,sN]。
(19)
2.2.1.2 基于拱架识别的多拱架复合区域规划
通常情况下,一次喷涂作业循环中包含多个拱架,由此需要将单拱架的N个喷涂区域扩展成多个拱架的喷涂区域。假设拱架识别结果如图5所示,则应在相邻两榀拱架之间扩展待喷涂的拱架位置,以完成对拱架间区域的完全填充。
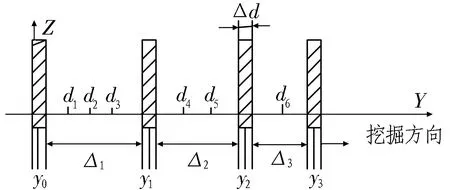
图5 拱架识别结果图
扩展时只用将识别出的拱架沿隧道掘进方向偏移一定的距离di即可,偏移量di的选择原则如下:
Δi=(yi-yi-1)-Δd。
(20)
当Δi≤600时,
(21)
当600<Δi≤1 000时,
(22)
当Δi>1 000时,
(23)
对本次喷涂作业循环来说,每个轮廓片段可以由扩展出来的M个拱架的N个喷涂区域组成,记为
(24)

2.2.2 最优喷涂路径规划技术研究
喷涂区域划分完成后,还不能指导喷枪的运动,只有将由二维矩阵表征的喷涂区域转换成一维数组,才能得到一条完整的喷涂路径。最优路径规划的规则为:起始段需完成对拱架根部的喷涂,然后从下往上连续喷涂,且相邻喷涂区域臂架的运动量最少。由此,可以先从喷涂区域中划分出拱架基部进行喷涂,然后依据从下往上、沿拱架方向的原则连续喷涂完非拱架基部区域。最优喷涂路径规划原理如图6所示。
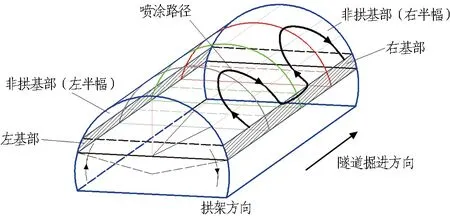
图6 最优喷涂路径规划原理图
2.2.2.1 优先拱架基部区域的锁脚路径规划
先喷拱架的左、右基部可以保证喷涂过程的安全和稳定。从轮廓中分割出拱架的左、右基部进行喷涂,再将剩余的非拱架基部划分成大区域,依据路径连续原则进行喷涂,可以达到先锁脚再喷涂的目的。以上台阶开挖方式为例规划锁脚路径,下台阶和全断面开挖方式与此类似。
从上台阶轮廓始、末片段中分割出拱架的右基部和左基部,设右基部到底板的高度为hr,左基部到底板的高度为hl,原始轮廓的始、末片段如图7所示。
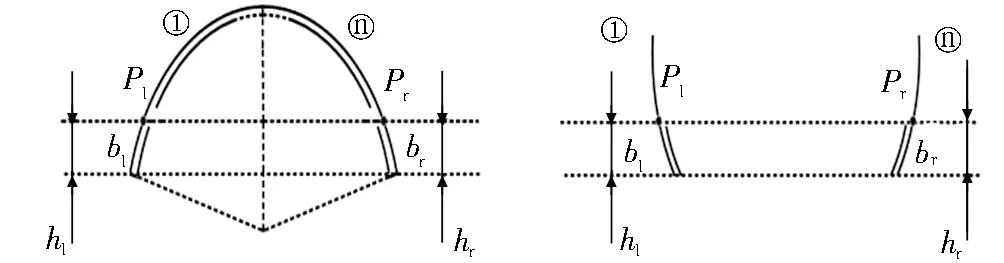
图7 上、下台阶始、末片段示意图
其中:
2.2.2.2 非拱架大区域划分
拱架基部分割后,上台阶轮廓剩余片段均匀分布于隧道左、右半幅,如图8所示。

图8 喷涂区域辐角位置规划
根据轮廓片段的喷涂区域规划,可以得到所有片段的喷涂区域矩阵。左、右拱架基部喷涂矩阵记为
(25)
(26)
非拱架基部喷涂区域矩阵记为
(27)
若锁脚过程是先喷涂右拱架基部sr,后左拱架基部sl,则排序结果为:Sr、Sl、S。
2.2.2.3 减少剥脱量的自下而上的喷涂路径规划
喷涂过程中,附着的泥浆会因为支撑力不够而剥脱,造成凹陷点,需用人工补涂。自下而上的喷涂路径,使得先喷区域的附着泥浆能够支撑后附着的泥浆,可显著减少剥脱量。
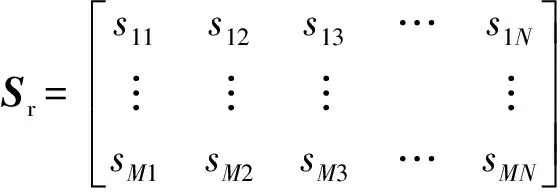
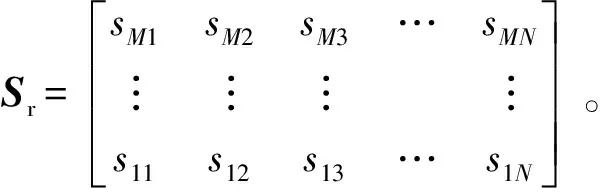
根据轮廓的片段描述,开挖轮廓始、末方向沿顺时针旋转,则轮廓左半幅的区域规划矩阵Si依序从下往上排列,而右半幅的区域规划矩阵Si依序从上往下排列,如图9所示。显然,右拱架基部的区域规划矩阵Sr按行倒排序,即可调整为从下到上的顺序。
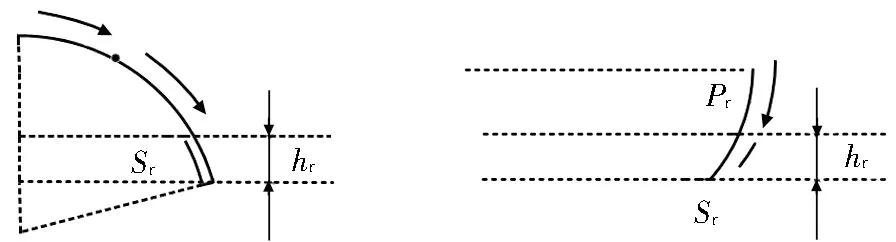
图9 开挖轮廓的右半幅
同理,对非拱架基部的右半幅区域的片段喷涂矩阵按行倒排序,也能调整成自下而上的顺序:
(28)
大部分情况下,在轮廓左、右半幅的轮廓片段不只一个,则右半幅的轮廓片段也需要倒排以调整成从下而上的顺序,即

(29)
或者更一般的为

(30)
2.2.2.4 减少剥脱量的自下而上的喷涂路径规划
拱架基部的喷涂路径沿隧道掘进方向,则锁脚效果更快更好,而非拱架的喷涂路径沿拱架方向,则能显著减少直喷拱架的时间。因此,需要对拱架基部、非拱架基部的喷涂区域矩阵分别完成行、列排序处理。
根据喷涂区域规划原则,喷涂区域矩阵S的每行表示同一拱架,每列表示同一喷射辐角,为获得连续的喷涂路径,拱架基部按列排序且首尾相连,对矩阵处理的顺序如图10所示;非拱架基部按行排序且首尾相连,对矩阵处理的顺序如图11所示。

图10 拱架基部沿掘进方向的喷涂路径
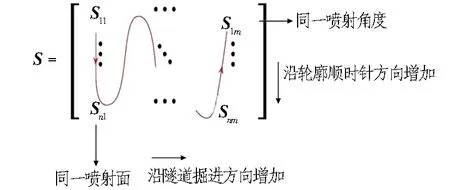
图11 非拱架基部沿拱架方向的喷涂路径
根据最优喷涂路径,制定优先锁拱脚、自下而上、沿拱架或掘进方向的喷涂路径规则。即从轮廓首、尾片段中先分割指定高度的拱架左、右基部,再调整非拱架轮廓片段顺序,最后调整喷涂区域规划矩阵的行列顺序,得到一条完整、连续的喷涂路径。
3 工程实践与应用
智能喷浆机器人对上述关键技术进行突破,解决现阶段行业内痛点,在康定公路郭达山和任家沟隧道现场实践应用。康定公路地处高原海拔3 800 m,隧道施工条件苛刻,工作环境恶劣,属于典型的高原隧道。针对现场施工数据对车体定位、臂姿测量、喷涂轨迹规划3个部分分析,精度符合设备研究标准,喷涂质量满足现场要求。
3.1 车体定位精度
对郭达山隧道进行多次车体定位试验,试验结果均满足设计要求,车体定位数据如表1所示。因现场施工条件原因,Z方向定位精度相对X和Y方向较差,其最大定位误差为44 mm,误差满足设计标准中定位误差均值<15 mm,定位误差标准差<30 mm,车体定位精度<50 mm要求,具体数据与误差分析数据如图12和图13所示。
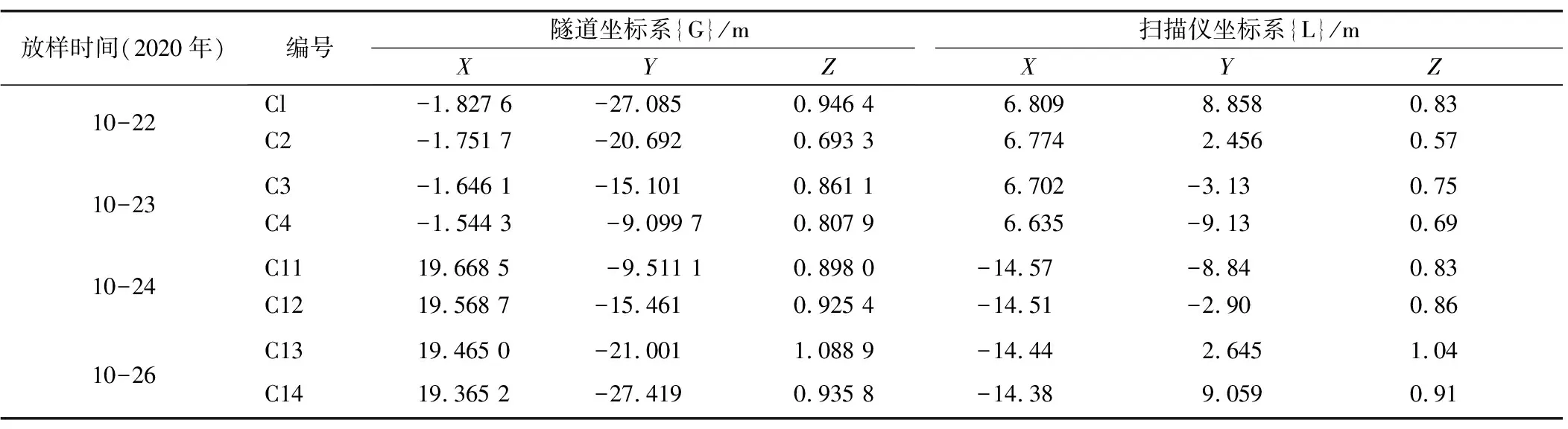
表1 郭达山隧道车体定位数据表
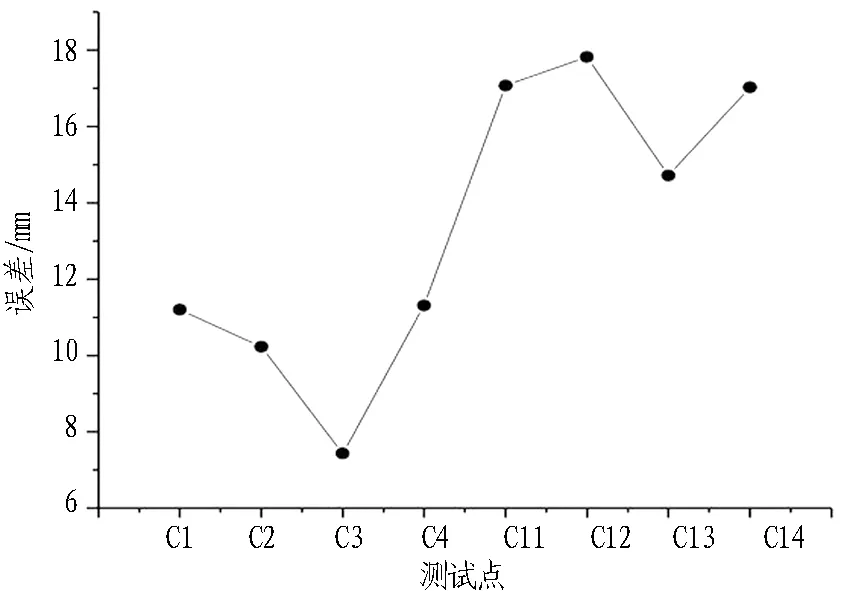
图12 隧道坐标系与扫描仪坐标系点位距离误差图
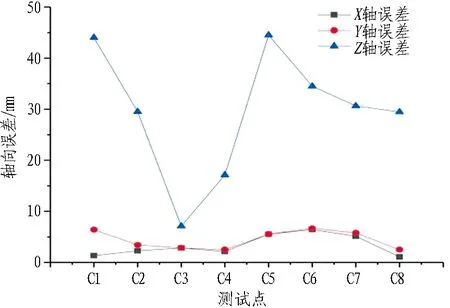
图13 三轴坐标距离误差图
3.2 臂架末端精度
完成任家沟隧道喷浆机器人施工数据分析,计算末端标记点理论值并与全站仪的实测值进行对比,任家沟隧道臂架末端实测与计算误差如图14所示。分析数据发现,X、Y、Z方向分布呈现一定规律,重新补偿校零,经挠度补偿算法计算后,输出X方向误差减小到20 mm以内,Y方向误差减小到20 mm以内,Z方向误差减小到50 mm以内。补偿校零后任家沟隧道臂架末端实测与计算误差如图15所示。
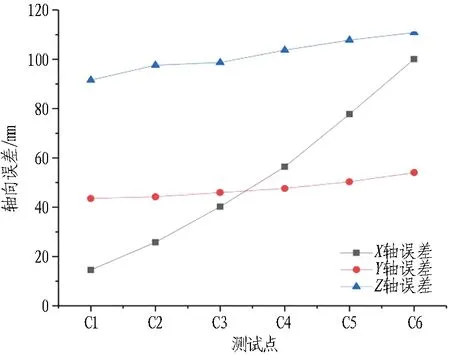
图14 任家沟隧道臂架末端实测与计算误差
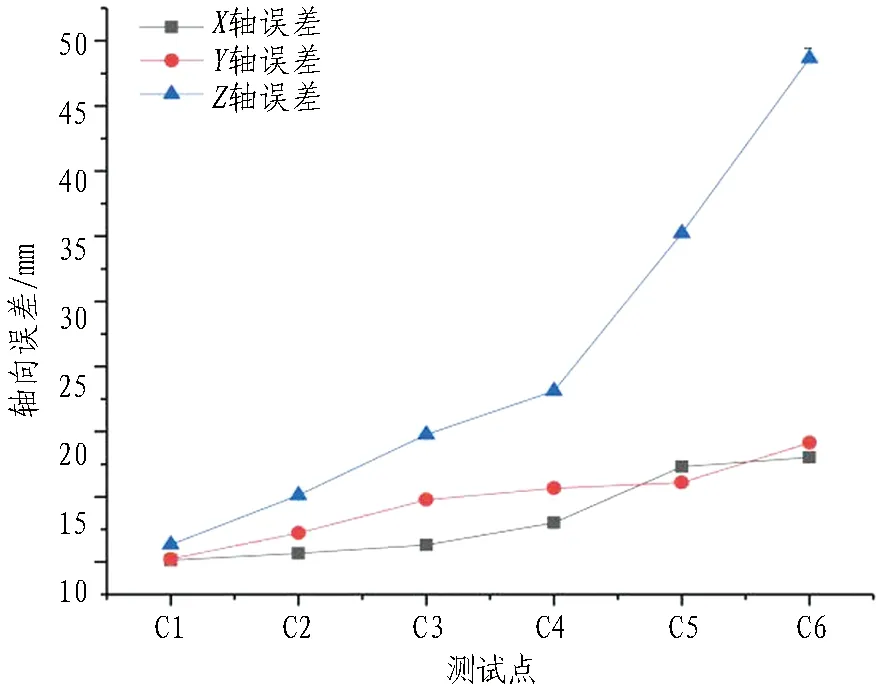
图15 补偿校零后任家沟隧道臂架末端实测与计算误差图
3.3 喷涂轨迹规划
现场自动喷涂过程覆盖左右拱基及非拱基,喷涂轨迹依据喷涂规划算法对臂架、喷枪、泵送等进行运动控制,完成喷涂作业。臂架末端和喷枪位姿仿真轨迹如图16所示,隧道作业现场如图17所示。
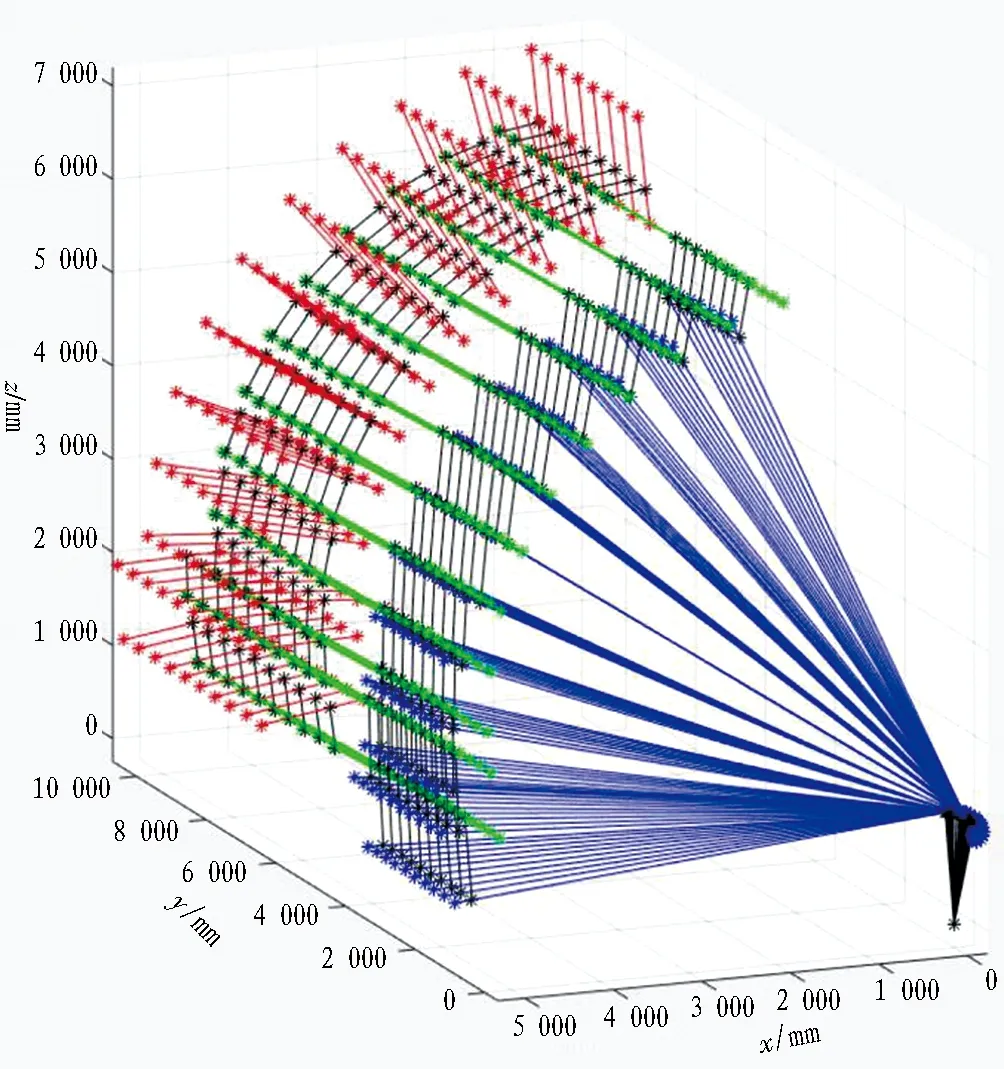
图16 臂架末端和喷枪位姿仿真轨迹图

图17 隧道作业现场图
4 结论与讨论
喷浆机器人作为新型智能化设备,对比人工喷浆和传统的喷浆机械手在感知识别与路径规划方面均实现了突破,主要结论如下:
1)针对复杂工况,实现利用三维扫描装置对设备位置、隧道轮廓、拱架类型等进行感知,提取各感知目标特征值,对比特征值数据库,完成感知结果分析识别,为路径规划提供准确有效现场工况信息,减少作业人员数量,提升系统整体可靠性。
2)实现感知识别反馈结果路径规划,通过自适应喷涂算法和最优喷涂路径算法,对喷涂策略、轨迹进行整体规划,提升隧道壁喷浆作业面施工质量,减少现场工作人员工作难度。
3)喷浆机器人在康定公路任家沟隧道和郭达山隧道进行了实战应用,感知识别与路径规划误差均在设计范围内,满足系统设计要求,喷涂作业质量对比人工和其余机械化设备有较大提升,机器人按照规划路径自主完成喷涂作业也减少了现场人员工作强度。
喷浆机器人智能化升级任重而道远,根据研究和现场实际试验,机器人在极恶劣环境下的控制问题和实时定位2个技术难点上仍有较大优化升级空间。当机器人所处隧道环境极其复杂,作业人员无法进入喷浆工作面操作设备,远程操控技术可有效解决;机器人隧道中的定位系统目前仍依靠设备测量,根据测量结果进行隧道定位,操作过程费时复杂,而新兴定位技术的成熟和发展为隧道内定位提供了新的思路,自动实时的台车定位能为机器人提供快速高效的定位信息。
