基于梯度迭代的阻抗控制曲面跟踪方法仿真
2022-12-24卢承华朱明超吴清文
卢承华, 朱明超,王 栋, 吴清文
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.长光卫星技术有限公司,吉林 长春 130033)
1 引言
如今,机械臂被广泛应用到去毛刺、焊接、打磨等工业自动化加工等领域,这些工作要求机械臂末端与环境接触并对接触面进行跟踪与预测,且需要同时控制机械臂末端的位置与力信息[1-2]。针对机械臂末端力与位置的智能控制问题,国内外学者已经开展了很多研究。
力/位混合控制[3]、阻抗控制[4]是两种主要的柔顺控制方式。其中,力/位混合控制在控制过程中需要预先对力矩阵或位置矩阵进行选择,即控制过程中需要对力、位置控制模式来回切换,不能同时对二者进行控制,这一缺点大大影响了机器人控制的柔顺性[4-5]。而阻抗控制避开这一缺点,成为一种性能优良的控制算法。自1985年Hogan提出阻抗控制概念以来,该算法便受到了极大的关注并应用到了机器人控制的各个领域[6]。Lasky与 Hsia首次将阻抗控制应用到力跟踪问题,他们将机械臂与环境接触的模型等效为虚拟的质量-弹簧-阻尼系统,巧妙地简化了控制过程[7]。
阻抗控制与自适应控制以及学习算法的结合也成为了国内外学者研究的热点。Seul使用自适应控制对阻尼系数进行优化[8],Liu、段晋军等人对刚度系数进行优化[8-11],但自适应过程并未显示优化后的阻抗系数。Abdelhamid提出了四种可用于机器人的迭代学习控制方法[12],李琳、Liang等人将迭代学习应用到了曲面跟踪[13-15],并对末端轨迹偏移量进行迭代学习,但该算法需要经历较多的迭代次数才可达到理想效果。Li、Ge用基于线性二次调节的强化学习阻抗控制算法权衡并减小力与位置误差[16-17],Loris利用强化学习与迭代学习步长摩擦力并进行了阻抗力控制[15],张铁利用强化学习优化了力误差系数[18],但强化学习具有较高的计算复杂度。
为提升学习效率并简化学习过程,本文提出了一种基于梯度迭代的阻抗控制算法,适用于未知曲面的跟踪过程,可以处理环境参数和机器人动力学的不确定性。通过优化机械臂阻抗模型的等效阻尼系数,减小了跟踪过程中力误差与位置误差,能够在误差允许范围内寻找到最优的阻尼系数且使系统趋于稳定。仿真结果证明,该算法具有较高的效率和较高的精度,具有可行性和正确性。
2 机器人末端与曲面接触模型

(1)
式中M是质量矩阵,B是阻尼矩阵,K是刚度矩阵,ΔF(t)为实际接触力F与期望接触力Fd之差。该模型的传递函数为
(2)
不失一般性,以一维空间举例,只考虑一维空间的机器人末端与曲面接触模型为

(3)
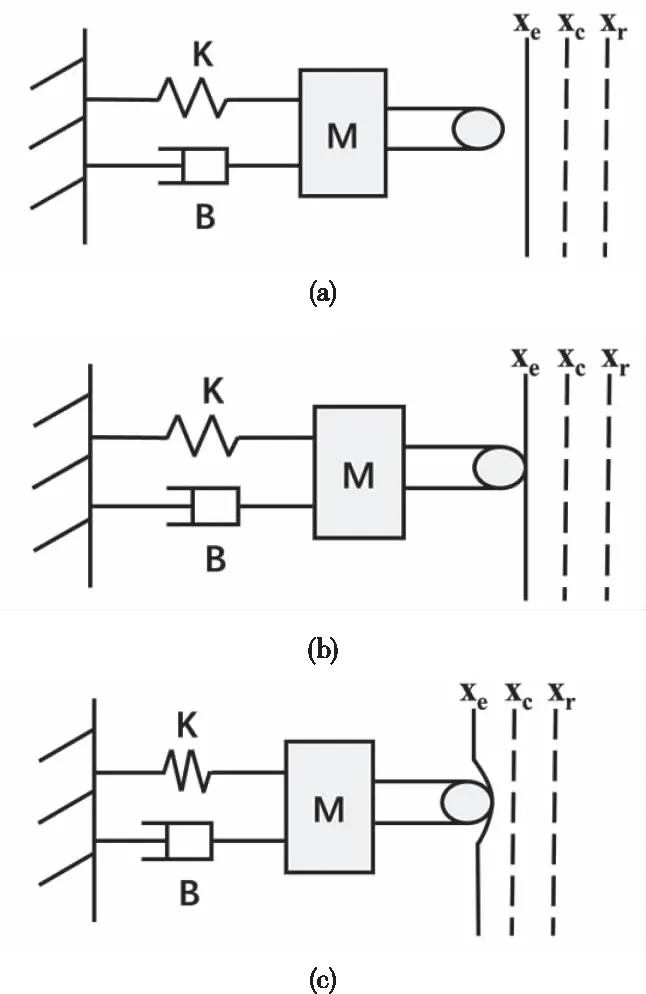
图1 机器人末端与环境接触模型
其中e=xc-xr。Δf可分解为
Δf=f-fd
=ke(xe-xc)-fd
=kexe-kexc-fd
=kexe-ke(xr+k(s)Δf)-fd
(4)
将一维空间的传递函数代入得
Δf(ms2+bs+k+ke)
=(ms2+bs+k)[ke(xe-xr)-fd]
(5)
由此可得稳态力跟踪误差

(6)
为使(5)式收敛于0,需对fd进行讨论:
若fd=0,存在xr=xe,必然使Δfss=0,因此稳态力跟踪误差收敛于0。
同时,在传统载体基础上,丰富教育手段。构建一个或多个具有代表性的师生交流平台,培养一批少数民族学生意见领袖,充分利用互联网渠道下的自媒体平台,扩大意识培育宣传覆盖面。高校民族团结进步教育不止是在寝室民族团结、主题班会等显性教育上做文章,同时需将教育根植于文化理念中,在校园学习和生活中内涵式的表达、浸润式的教育,潜移默化地影响学生。通过榜样示范、民族文化展示等途径激励大学生自觉培养民族团结精神和爱国主义精神。
若fd≠0,ke(xe-xr)-fd≠0,因此想要使稳态误差收敛于0,须置k=0,由此机器人末端与曲面接触模型可简化为
(7)
其中e=xc-xr。由于环境参数未知,很难获得精确的参考轨迹,因此以环境位置xe取代参考轨迹xr,则阻抗控制模型为

(8)
其中

=ke(xc-xe)-fd
=-kee-fd
(9)
即

(10)
3 基于梯度迭代的阻抗控制算法
未知曲面跟踪与预测任务要求机器人及环境接触的力尽量小,同时尽量贴合环境位置,因此曲面跟踪与预测效果的好坏与力误差和位置误差有关。定义ef为实际接触力f与期望力fd的差,ex为机器人末端实际位置xc与环境位置xe的差,即
(11)
在此,定义损耗函数Γ作为曲面跟踪与预测效果的度量,即
(12)
其中,γ1和γ2是力误差与位置误差的权重系数。若机器人任务为纯力跟踪,可设γ2=0或γ1≫γ2,反之同理。
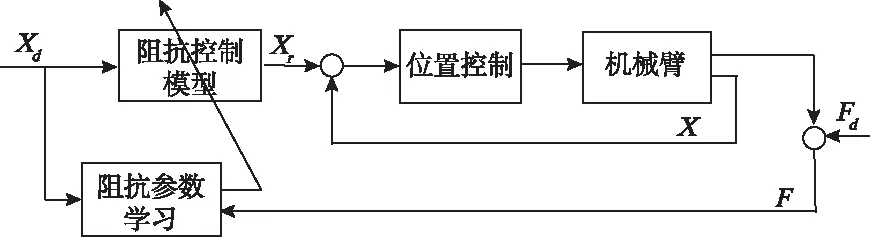
图2 控制结构
在前一节式(7)已经推导得出简化后的阻抗控制模型。由于质量矩阵m的改变会导致系统不稳定,因此一般将m设为定值[19],如下式

(13)
通过优化阻尼系数b,可以达到曲面跟踪与预测的良好效果。
本文使用基于梯度迭代的学习方法优化阻尼系数。其优化策略如下
bk=bk-1+α∇Γbk-1
(14)
(15)
由式(8)、(9)和式(12)知
(16)
因此式(14)可以转化为与误差相关的函数

(17)
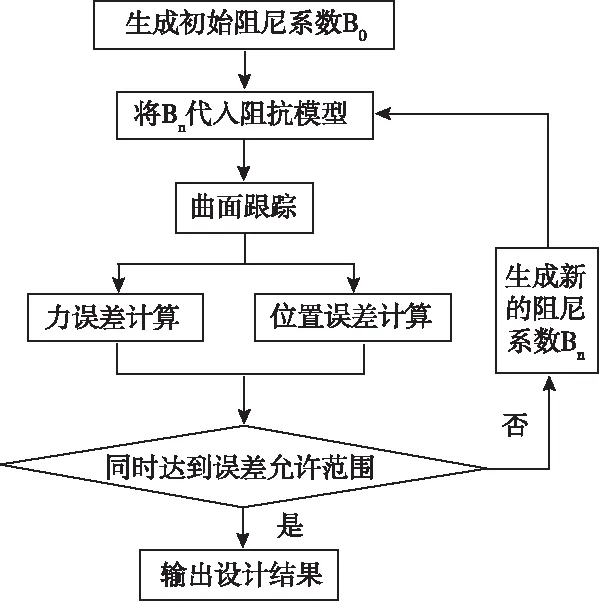
图3 阻抗系数优化流程
4 仿真及结果
4.1 仿真
为验证所提方法的有效性,使用Matlab Simulink模块以二自由度机械臂跟踪未知曲面进行仿真。曲面跟踪任务为:在保证机器人末端与曲面有接触的情况下,对曲面轮廓进行检测。
曲面跟踪轮廓为圆心在(1m,1m)处、半径0.2m的圆形二维曲面,曲面刚度系数为,但机器人对曲面信息未知,机器人末端运动的初始位置位于(0.8m,1.0m)处,采样时间0.001s。
为防止机器人的质量矩阵变化给系统带来的不稳定性,将质量矩阵设为定值。阻尼系数的学习采用梯度上升策略,初始值为0,学习速度因子 设为10,损耗函数 中力误差与位置误差的权重系数 、 分别设置为2.5、7.5,这表明在此次仿真中,更看重轨迹跟踪的效果,但学习速度因子和权重系数可以依据操作任务需求调整。理想情况下,对于曲面检测,应将理想跟踪力设为0,但为保证机器人与曲面接触,将理想跟踪力设为 N。将目标理想跟踪力误差定为0.01N,目标理想跟踪位置误差为3mm,当实际跟踪力和跟踪位置误差同时达到跟踪误差精度时,迭代停止。
4.2 仿真结果
经过10次迭代后,曲面跟踪的效果较理想。机器人在与曲面接触前期,接触力波动较大,后期波动较小;随着迭代次数的增加,接触前期波动幅度减小,后期逐渐接近理想跟踪力设定值,其中第10次迭代得到的实际接触力为0.0497N,与理想跟踪力的误差小于0.01N,如图4。迭代前期,跟踪轨迹与理想轨迹存在一定差距,经过10次迭代后,机器人末端已经可以较完美地跟踪曲面轨迹,其中x方向的跟踪效果逼近过程如图5,首次与末次的二维跟踪效果如图6。
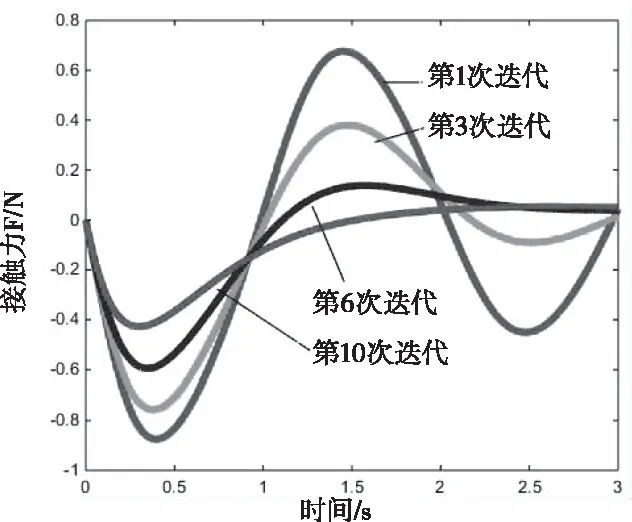
图4 机器人与曲面力跟踪迭代效果
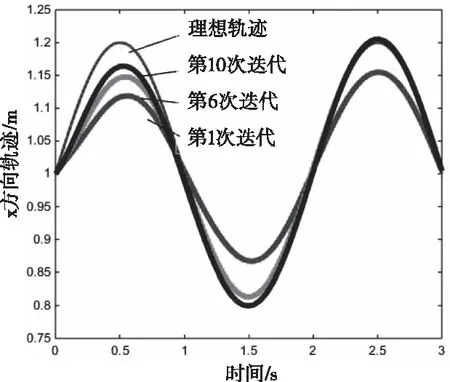
图5 机器人与曲面跟踪X方向位置迭代过程
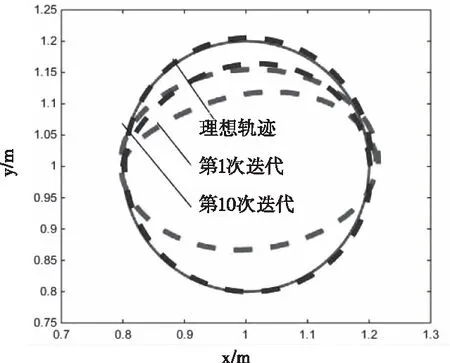
图6 机器人与曲面轨迹跟踪迭代效果
作为曲面跟踪效果的度量,损耗函数显示了迭代后的曲面跟踪的结果,如图7。由于损耗函数是与力跟踪误差、位置跟踪误差相关的函数,因此其呈现的变化趋势与图4和图5相似,但由于误差只可减小并不可消除,因此损耗函数始终为正,但跟踪效果显示,经过10次迭代,损耗函数呈现收敛趋势,在第10次迭代过程中已经趋近于0。每次迭代过程中的最大位置跟踪误差是跟踪效果稳定性的评价标准,图5显示了10次迭代过程中的最大位置误差与描述最大位置误差变化趋势的最大误差导数,由图可见,二者都呈现收敛趋势,可见该算法稳定性良好。
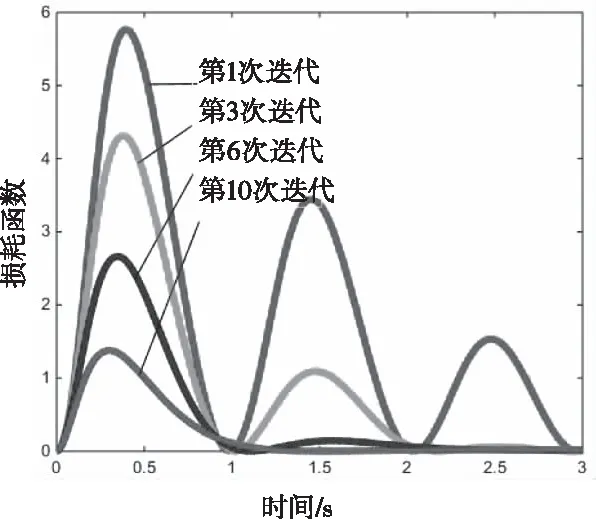
图7 损耗函数变化
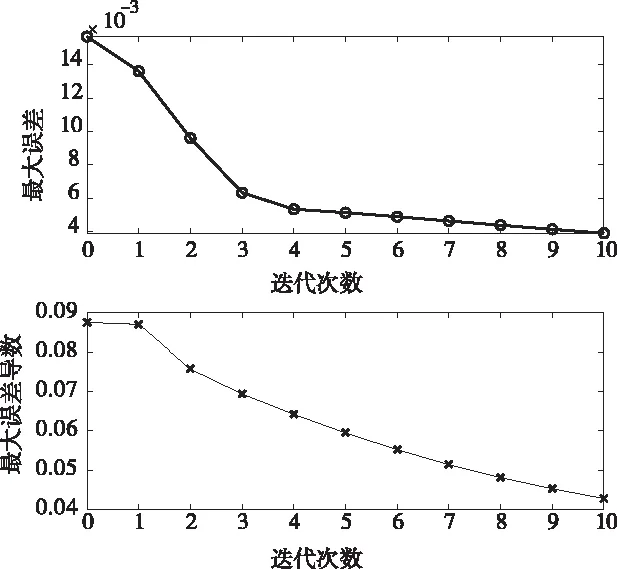
图8 最大位置误差
在迭代过程中,阻尼系数由初始值0开始寻优,经过10次迭代后,满足了力跟踪误差和位置跟踪误差,且能够在0.5s时间内迅速响应接近最优阻抗系数,如图7。此时最优的阻尼系数约为[24,0;0,24]。
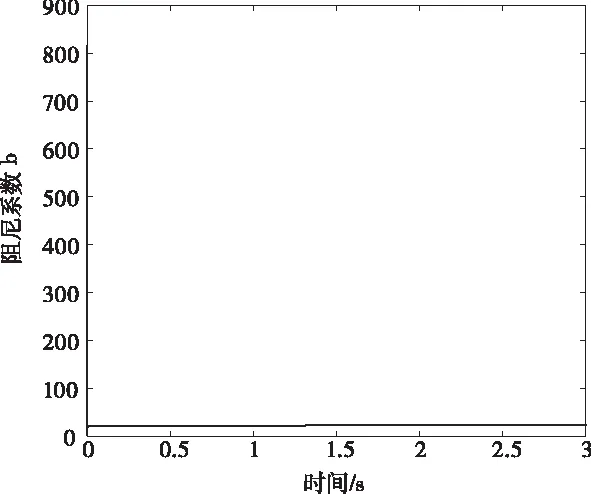
图9 第10次迭代过程中的阻尼系数
5 结束语
本文提出一种基于梯度迭代的阻抗控制算法,适用于机器人对未知环境的曲面跟踪。对机器人末端执行器与曲面接触建立阻尼系数可变的新型阻抗控制模型,使用梯度上升迭代算法对阻尼系数进行优化,能够在短时间内迅速响应至最优阻尼系数。设置与力误差、位置误差相关的损耗函数作为跟踪效果的度量。仿真结果证明,该算法能够在10次迭代后达到理想的控制精度,具有较高的迭代稳定性,能够达到良好的曲面跟踪效果,具有广阔的应用前景。
