复杂地理环境下虚拟场景非定标3DRA仿真
2022-12-24孙敏,崔利
孙 敏,崔 利
(长春工程学院,吉林 长春 130021)
1 引言
我国疆土辽阔,在丘陵、山区等复杂地理环境中建立通信、电力等应用是我国社会发展的重要趋势[1]。将三维重建技术应用于复杂地理环境中具有极高的研究价值,利用三维重建技术建立复杂地理环境的虚拟场景,利用所建立的虚拟场景提升人们对世界的认知。复杂地理环境出现地质灾害时,高精度的复杂地理环境下虚拟场景的三维重建技术受到众多研究学者关注。利用所建立三维虚拟场景,人们可实现不同复杂地理环境的交互,提升环境真实感[2]。以往通常利用传统地图展示复杂的地理环境,利用抽象的符号体现环境信息,真实性较差。利用三维重建技术所建立的虚拟场景具有较高的真实性,获取极高的感官效果[3]。复杂地理环境下虚拟场景的主要优势是逼真感,三维虚拟场景可体现真实场景的视野、尺寸以及色彩。
三维场景重建是计算机视觉领域的研究难点,已应用于机器人导航、交通等重要领域中。三维场景重建主要包括定标技术以及非定标两种[4],摄像机定标指利用完成定标后的摄像机采集图像,重建三维场景。非定标技术指利用非定标的摄像机采集图像[5],通过所采集图像的特征提取与特征匹配实现三维图像重建。非定标三维重建技术可改善三维重建技术需利用精密的靶标实现摄像机定标,对三维重建技术有所限制的缺陷,提升三维重建技术的应用性[6]。非定标三维重建技术利用图像间的特征点匹配,恢复三维场景间各视图的几何约束关系,对于复杂地理环境下的三维场景重建具有重要意义。
三维虚拟场景重建中的特征点匹配结果极为重要,匹配精度差将造成三维场景失真情况[7]。高效的不受噪声影响的特征匹配方法可提升场景重建性能。目前针对三维场景重建的研究较多,张健与陈颖等人分别利用噪声点云以及双视系统实现三维场景重建[8,9],通过实验验证两种方法均具有较高的三维重建性能,但无法应用于复杂地理环境中。针对复杂地理环境中三维场景重建较为困难的特点,研究复杂地理环境下虚拟场景非定标三维重建算法仿真,选取Harris算法提取复杂地理环境下待重建三维场景的特征点,选取相关系数方法实现图像点的特征匹配,利用所提取精准的特征点提升三维场景重建的特征点匹配精度。所研究算法保障特征点匹配精度同时可提升匹配速度,利用高效的计算性能实现复杂地理环境下虚拟场景的三维重建。通过仿真测试结果验证所研究算法具有较高的虚拟场景三维重建性能,可应用于复杂地理环境中的三维场景重建。
2 复杂地理环境下虚拟场景非定标三维重建算法
2.1 特征点提取
选取Harris角点提取方法提取复杂地理环境下虚拟场景三维重建的特征点。设置局部检测窗口于待重建场景图像中,以极小距离移动该窗口至不同方向,利用窗口移动时的平均能量变化提取特征点[10],设置特征点提取阈值,能量变化值超过已设定阈值时,设置该窗口的中心像素点为所提取的特征点。
建立三维重建场景图像亮度的自相关矩阵表达式如下

(1)
用H表示大小为(2k+1)(2k+1)图像的高斯卷积核函数,其表达式如下

(2)
Harris算法的特征点响应函数表达式如下
J=det(M)-k(trace(M))2>T
(3)
以上公式中,σ表示经验系数。函数J的局部极大值点与特征点相对应,所获取图像像素点的J值高于所设定阈值T时,视该点为特征点。
利用Harris算子所提取特征点在图像局部区域容易存在特征点聚簇情况,即所提取的特征点距离较短,容易造成特征点误匹配情况[11],影响图像特征点匹配精度。利用限制因子r避免所提取特征点存在聚簇情况,令所提取的特征点分布均匀。
引入限制因子提取特征点流程如下:
1)搜寻特征点序列Z,初始化计数器i=N,其中N表示所提取的Harris特征点数量;
2)搜寻最具特征的特征点m0,将其设置为保留点,加入特征点序列Z内;
3)获取特征点序列Z内的全部特征点与新特征点mi间的欧氏距离dj,将欧氏距离与所设置限制因子a比较。所获取欧氏距离大于已设定的限值因子时,保留该特征点。重复迭代该过程,直至全部特征点均搜索完成,终止算法。
所提取特征点具有越高的精度,三维重建效果越高。将所提取的特征点利用高斯曲面拟合内插[12],提升特征点的亚像素级。拟合内插处理对角点邻域内的像素值I(x,y),拟合曲面函数表达式如下

(4)
用(u0,v0)表示所提取的特征点,将该特征点设置为圆心,设置半径为dr的圆为特征点邻域,搜寻全部邻域内的像素点I(x,y),获取虚拟场景的三维特征点坐标集合为{(u0,v0,I(u0,v0)),(u1,v1,I(u1,v1)),…,(uN,vN,I(uN,vN))}。利用所获取的三维特征点拟合高斯曲面函数,提升所提取特征点精度。
2.2 基于相关系数的特征点匹配

(5)
式(5)中,(x,y,z)与(xk,yk,zk)分别表示光心点θl与θr的坐标,uk=(uxk,uyk,uzk)表示单位方向矢量。
F=[(xq-xk)uyk-(yq-yk)uxk]2
+[(xq-xk)uzk-(zq-zk)uxk]2
+[(yq-yk)uzk-(zq-zk)uyk]2
(6)
(7)


(9)
利用以上公式获取像点的相关系数函数表达式如下

(10)
通过式(10)所获取的相关系数衡量像点与像点是否匹配[14]。相关系数数值区间为[0,1],相关系数值越大,表示像点对具有越高的相关性,匹配精度越高。
2.3 三维重建算法
将完成匹配的不同视图图像中的三维特征点转换至相同坐标中,恢复复杂地理环境中虚拟场景的三维形状。依据不同视图相邻图像的公共三维点坐标利用变换矩阵转换至相同坐标系中。
用OAXAYAZA与OBXBYBZB分别表示完成匹配的视图对1以及视图对2的坐标系,可得两个视图对的坐标变换表达式如下

(11)
式(11)中,MBA表示转换矩阵。将以上公式转换如下
P=RQ+t(1)
(12)
以上公式中,t与R分别表示平移向量以及三维旋转矩阵,P与Q分别表示不同坐标系中的点集。
图像采集过程中存在测量误差,因此获取t与R的精确解较为困难。通过以下公式的最优解获取最佳坐标转换结果:

(13)
式(13)中,pi与qi为空间内相同点在不同坐标系中的坐标。
选取四元数算法求解式(13),Φ表示采用四元数求解方法求解过程中的变换参数,其表达式如下
Φ=[q0,qx,qy,qz,tx,ty,tz]T
(14)
式(14)的变换参数需满足以下约束条件:

(15)
依据式(12)获取点集如下
P=P(Φ)=R(Φ)Q+t(Φ)
(16)
利用所获取的新点集求解方差矩阵S如下
(17)
利用式(17)的协方差矩阵获取矩阵如下

(18)
矩阵(18)中,tr(S)与I分别表示S的迹以及大小为3×3的单位阵。最小特征值的相应向量qR即为令式(18)最小的四元素解,利用四元数获取R值。确定旋转矩阵R后,利用两个点集的重心差异确定平移向量t公式如下

(19)
确定平移向量以及三维旋转矩阵后,将三维特征点利用变换矩阵变换至相同坐标系中。利用变换矩阵获取三维特征点的投影矩阵[15],通过投影矩阵将三维特征点反投影至虚拟场景中,删除误差过高的特征点,获取精确的三维重建结果。
3 仿真测试
为验证所研究非定标三维重建算法对于复杂地理环境下虚拟场景的三维重建性能,选取VC6.0软件作为测试本文算法有效性的仿真软件,采用C++语言验证所研究算法有效性。选取所采集的长城某段的多组图像作为仿真测试对象,我国长城处于地理极为复杂的环境中,提升了虚拟场景三维重建的难度。所采集的其中两幅图像如图1所示。

图1 原始图像
通过图1所采集的原始图像可以看出,仿真测试的长城区域属于典型的山地型地域,长城图像中包含众多特征点,增加了图像特征点提取难度。
采用本文算法提取原始图像的特征点,提取结果如图2所示。

图2 特征点提取结果
通过图2特征点提取结果可以看出,所提取特征点均匀分布在图像的边缘处,可清晰体现图像中的地物结构。本文算法采用Harris角点提取方法提取图像中的特征点,引入限制因子提升图像中特征点提取精度。复杂地理环境下,仍具有较高的特征点提取性能,可提升复杂地理环境下虚拟场景的三维重建性能。
设置限制因子为从1-10,统计采用本文算法在不同限制因子时的匹配精度,统计结果如图3所示。

图3 不同限制因子的匹配精度
图3实验结果可以看出,限制因子从1升至6时,本文算法的匹配精度上升幅度极为明显;限制因子为6时的匹配精度高达96%。限值因子升高至6以上,本文算法的匹配精度仅有少量提升。分析图3实验结果,伴随限制因子的上升,本文算法的匹配精度有所上升,限制因子升高至一定程度时,匹配精度上升极为缓慢。限制因子过高将造成三维场景重建中,地物外貌点丢失情况。设置限值因子为6,可获取良好的特征点匹配结果。
设置限值因子为6,采用本文算法获取的图像初始匹配结果如图4所示。
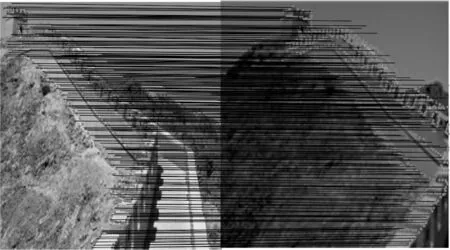
图4 特征点初始匹配
采用本文算法删除图4特征点初始匹配中所存在的误匹配特征点,获取最终特征点匹配结果如图5所示。

图5 图像匹配结果
图4与图5实验结果可以看出,本文算法可利用所提取的特征点实现特征点的良好匹配,并且可有效删除误匹配的特征点,利用精准的图像匹配结果提升三维重建性能。复杂地理环境提升了图像的匹配难度,本文算法可实现图像特征点的精准匹配,提升虚拟场景的三维重建性能。
统计采用本文算法重建三维虚拟场景,引入以及未引入限制因子时不同图像点对的相关系数,统计结果如图6所示。

图6 相关系数统计结果
图6实验结果可以看出,引入限制因子后,不同图像点对的相关系数有所提升。相关系数越高,表明图像特征点具有越高的匹配性能。图6结果验证引入限制因子可提升图像点对匹配的相关系数,提升图像不同点对的匹配性能。
采用本文算法获取仿真测试区域虚拟场景三维重建结果如图7所示。

图7 三维重建结果
图7仿真测试结果可以看出,采用本文算法可实现复杂地理环境下的虚拟场景三维重建,三维重建后的虚拟场景具有较高的逼真度,对于树木等复杂地物仍具有较高的重建性能,验证所研究算法具有较高的三维重建有效性。
统计采用本文算法所获取的三维重建仿真结果中,仿真坐标点坐标与实际坐标点坐标的对比结果,统计结果如表1所示。
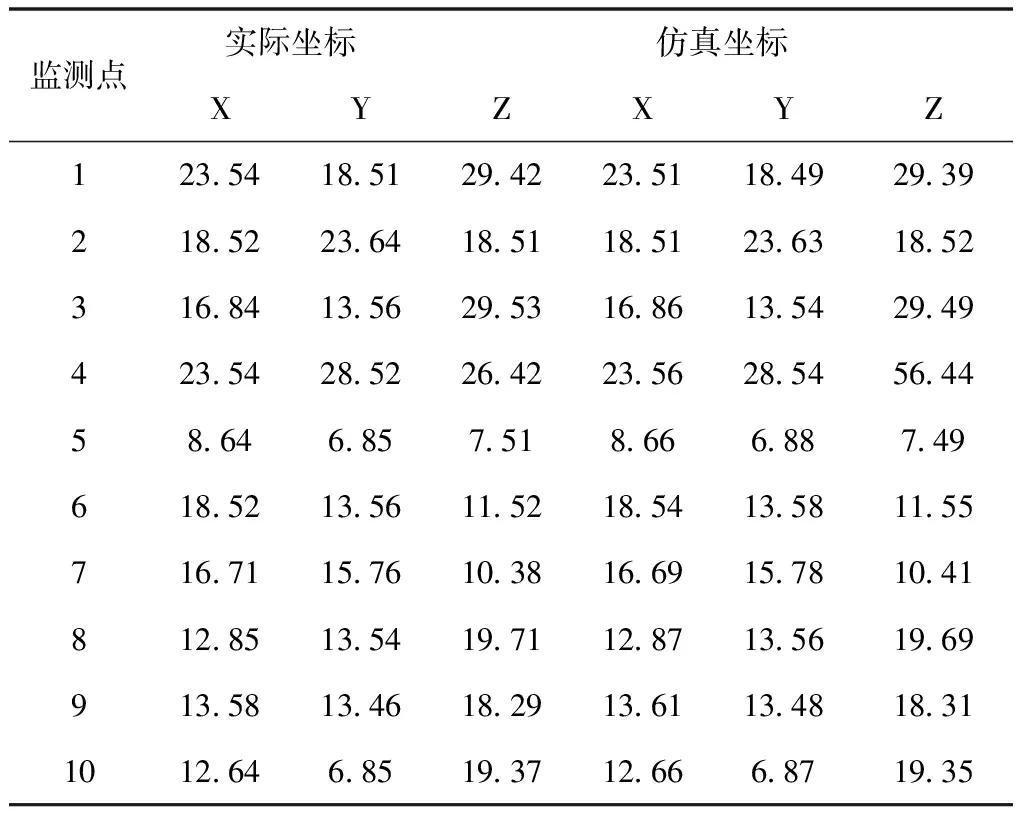
表1 三维重建结果与实际结果对比
表1实验结果可以看出,本文算法所获取的三维重建结果中的坐标点坐标与实际坐标点坐标结果极为相近,验证本文算法具有极高的三维重建精度。本文算法引入限制因子,提升特征点提取性能,具有较高的三维重建精度,对于复杂地理环境下的虚拟场景仍具有较高的三维重建性能。
4 结论
特征点提取是三维重建算法中的重要部分,所提取复杂地理环境图像中的特征点可体现图像中的地物特征,同时可提升场景三维重建精度。利用Harris算法提取图像中的特征点,引入限制因子避免所提取特征点过于聚集,提升匹配精度。非定标三维重建算法可改善定标三维重建算法所具有的定标困难,导致三维重建精度低的缺陷。利用仿真结果所研究算法具有较高的重建性能,可应用于复杂地理环境下虚拟场景的三维重建,为三维重建实际应用提供理论依据。
