基于Cult3D的倾斜摄影图像前景自适应配准方法
2022-12-24陈进强翁存福
陈进强,翁存福
(1.南昌大学共青学院,江西 九江 332020;2.江西师范大学科学技术学院理,江西 九江 332020)
1 引言
作为一种VR软件,Cult3D是一种质量非常高的三维渲染技术,能够通过其先进的压缩技术,增强图像中模型的真实度。倾斜摄影图像的前景是图像中的核心事物,配准倾斜摄影图像中的前景,根据倾斜摄影时摄影机的角度数值,综合图像前景中的位置、环境状态,可以得到图像之间的变换关系。国外在研究图像配准方法起步较早,上个世纪七十年代,国外研究人员使用快速傅里叶变换算法计算出了图像中的前景相似性度量,在传感器技术不断发展下,国外图像配准方法已经构建出了多种图像处理算法。国内研究图像配准方法起步较晚,在我国学者大量研究成果的支持下,已经形成了一个研究趋势。文献[1]选取固定阈值不具有广泛适用性的问题,针对SIFT算法中128维的高维度特征描述符,提出一种自适应阈值的方法,缩短算法运行时间的同时,提高匹配准确率和匹配效率。文献[2]检测待拼接图像中的特征点及特征信息冗余区域,提取关键特征点并进行匹配实现计算数据量的降低,对剩余的关键特征点进行粗细两步匹配,实现了图像配准拼接。文献[3]针对特定的约束条件,提出直接使用图像灰度值的无特征3D刚性配准方法,用泰勒展开式和最小二乘法直接计算待配准图像的变换参数,使用较少的数据点完成快速的配准。
综合国内外的研究成果来看,在Cult3D技术的支持下,研究倾斜摄影图像前景自适应配准方法是很有必要的,引入Cult3D方法构造配准基元,控制前景图像中重复的纹理特征,不断逼近待配准的配准点,进行配准方法的自适应优化。
2 基于Cult3D的倾斜摄影图像前景自适应配准方法
2.1 构建图像前景倾斜转换对应关系
在构建图像前景倾斜转换关系时,随机选用一点p定位图像前景中的特征点,保持特征点沿着一个方向移动[4-5],使用Moravec算子处理倾斜摄影图像,假设其为一个方形窗口,将移动过程中产生的灰度差平方和数值定义为算子在倾斜方向上的灰度变化值,灰度变化值就可表示为

(1)
其中,I(x,y)表示倾斜摄影图像,w表示前景图像大小,d(i,j)表示算子的在前景图像上的移动距离。算子在前景图像范围内移动过程中,会在水平方向、垂直方向上产生中心位置、边缘位置以及角点位置三种方向的灰度变化数值[6],产生的位置变化如图1所示。

图1 前景算子的位置变化
由图1所示的位置变化可知,中心位置的前景灰度值并不会产生较大的变化,故不赘述。对于边缘区域的前景来讲,算子在边缘区域垂直方向移动过程中会引起d(i,j)数值的变化,灰度数值产生了一定的变化。对于角点位置的前景图像来讲,算子在移动过程中产生了数值较大的灰度数值[7]。为了控制上述处理过程中噪声灰度数值的影响,使用高斯函数处理前景图像,处理过程就可表示为
(2)
其中,σ表示Moravec算子在移动过程中产生的方差数值,其余参数含义不变。在上述计算公式的控制下,使用Cult3D软件搭建一个虚拟空间[8],根据算子在空间移动的距离产生的正交基,构建一个倾斜线性变换过程,可表示为
(3)
其中,e1,e2,e3表示算子在空间移动的距离产生的正交基,(xw,yw,zw)表示算子在虚拟空间产生的三维坐标,(xc,yc,zc)表示变换处理后的算子坐标,r1,r2,r3表示前景图像的倾斜参数。在上述转换变化关系控制下,在Cult3D技术的支持下,搭建配准的基元。
2.2 使用Cult3D搭建配准的基元
在上述构建的前景倾斜转换关系下,利用图像前景中计算得到的前景灰度数值,构建一个归一化处理公式,构建的归一化处理公式可表示为
(4)

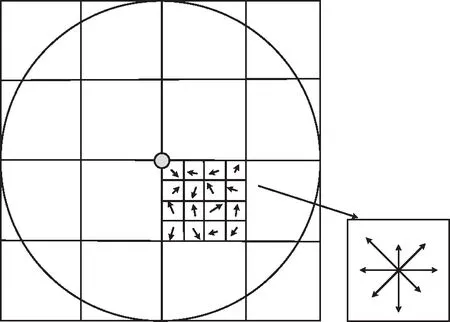
图2 归一化区域内形成的描述子
在图2所示的描述子控制下,以一个描述子单元作为一个配准单元。以单元内描述子的方向作为图像前景的子孔径,Cult3D对每个孔径产生的回波数据进行聚集处理,以此来获取前景目标在不同方位倾斜角产生的散射特性[9]。当孔径方位角度数值较小时,提高摄影图像分辨率数值,间接增加图像的信噪比,保证图像前景散射数值的精度;当选取的孔径方位角数值较大时,取描述子回波数据的平均数值,控制描述子的空间方位角的间隔,增强配准基元的精度[10];当获取得到的描述子过多,就会导致配准基元计算的复杂度过大的问题,采用描述子抑制的方法,检测归一化区域内的角点描述子,设置一个描述子门限,根据描述子占据的区域大小,去除区域内的角点。配准基元搭建完毕后,实现配准过程的自适应过程。
2.3 实现自适应配准
在上述构建的配准的基元控制下,整合上述排列处理得到的子门限数值为一个数值路径[11],定义路径中的数值为待配准的配准点,计算各个待配准点被选中的概率,可表示为
(5)
其中,nk表示子门限数值集合,ni表示路径数值集合,F表示子门限数值数量。根据概率数值的大小,以概率0.5为组别划分标准,此时在数值路径和匹配点的控制下,就形成了两种顺序约束下的配准顺序,如图3所示。
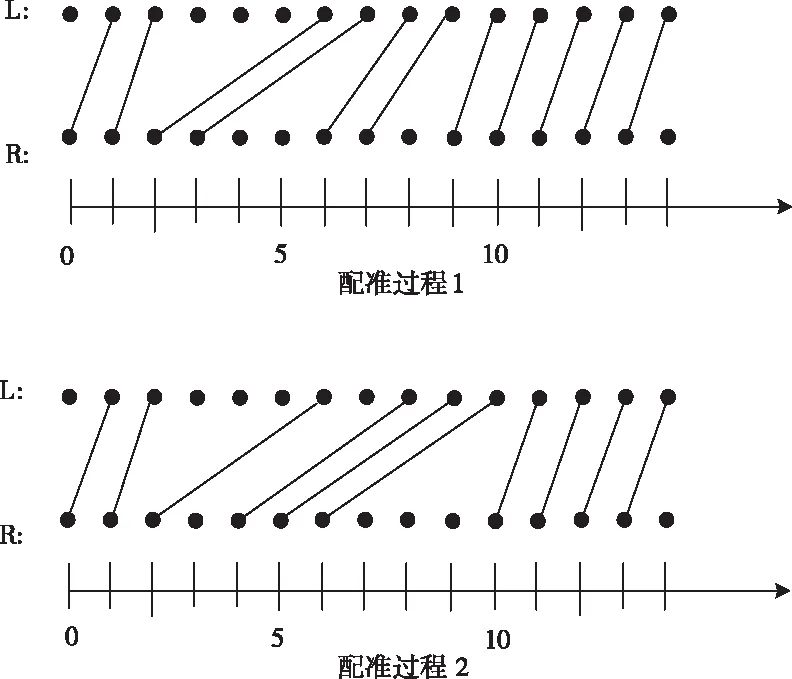
图3 形成的顺序配准种类
在上述顺序配准种类控制下,为了控制图3所示的配准过程待配准点的丢失,将未被约束配准的算子整合为一个集合,采用等距变换处理该数据集合,重复配准剩余的待配准点,使用上述处理过程重新进行配准,不断配准得到的待配准点。当配准点剩余数量小于10时,依次计算各个配准点间的欧式距离,将欧式距离在Cult3D空间内的投影数值作为阈值,将小于阈值的待配准点进行匹配,形成一个匹配队列,最终实现配准过程的自适应过程[12]。综合上述处理最终完成对基于Cult3D的倾斜摄影图像前景自适应配准方法的构建。
3 实验分析
3.1 实验准备
准备一台参数如表1所示的摄影机。
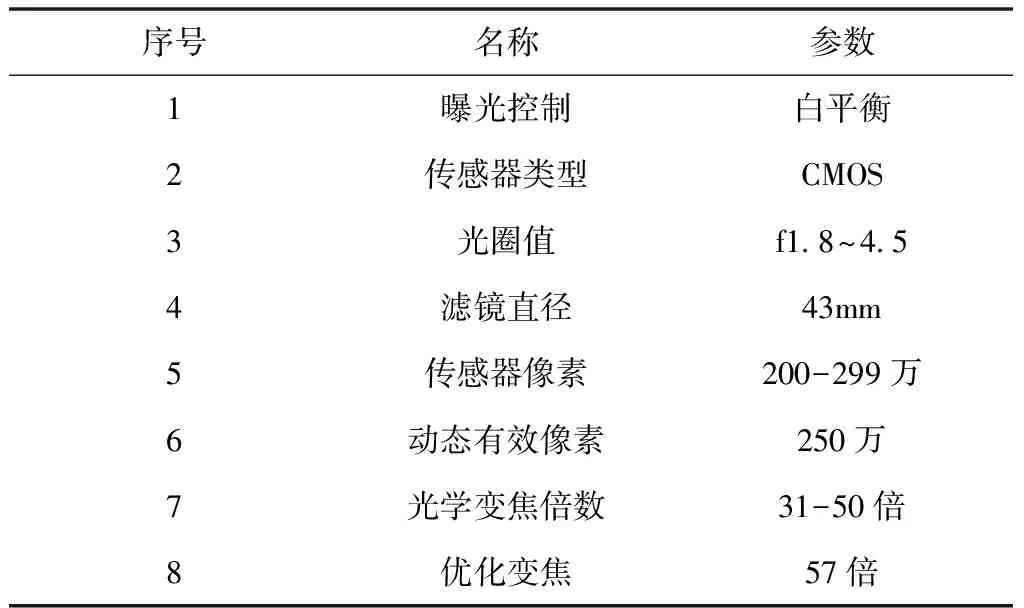
表1 准备摄影机参数
使用上表所示的摄影机参数进行拍摄,随机选用六种图像进行配准,设定该配准图像的变换参数,设定的变换参数如表2所示。
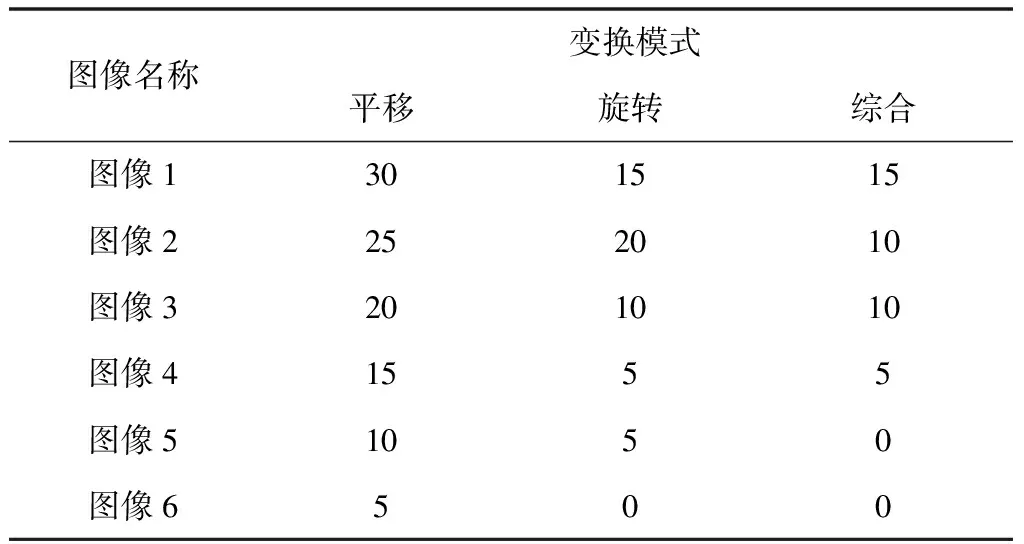
表2 设定的变换参数
设定上表所示的变换参数后,采用Opencv的核心编程平台,使用内存为8G、CPU为i5、系统平台为Windows7的计算机,支持Cult3D的运行,导出实验使用的图像模型后,分别使用文献[2]中的配准方法、文献[3]中的配准方法以及文中设计的配准方法进行实验,对比三种配准方法的性能。
3.2 结果及分析
基于上述实验准备,控制上表设定的变换参数图像两两配准,共计15种配准过程,定义两图像之间的表示为
(6)
其中,N0,Ns分别表示待配准图像,Nt表示设定的变换参数。变换15组图像表现出的重复率结果,三种配准方法最终得到在重叠率控制下,图像正确配准结果,正确配准率结果如表1所示。
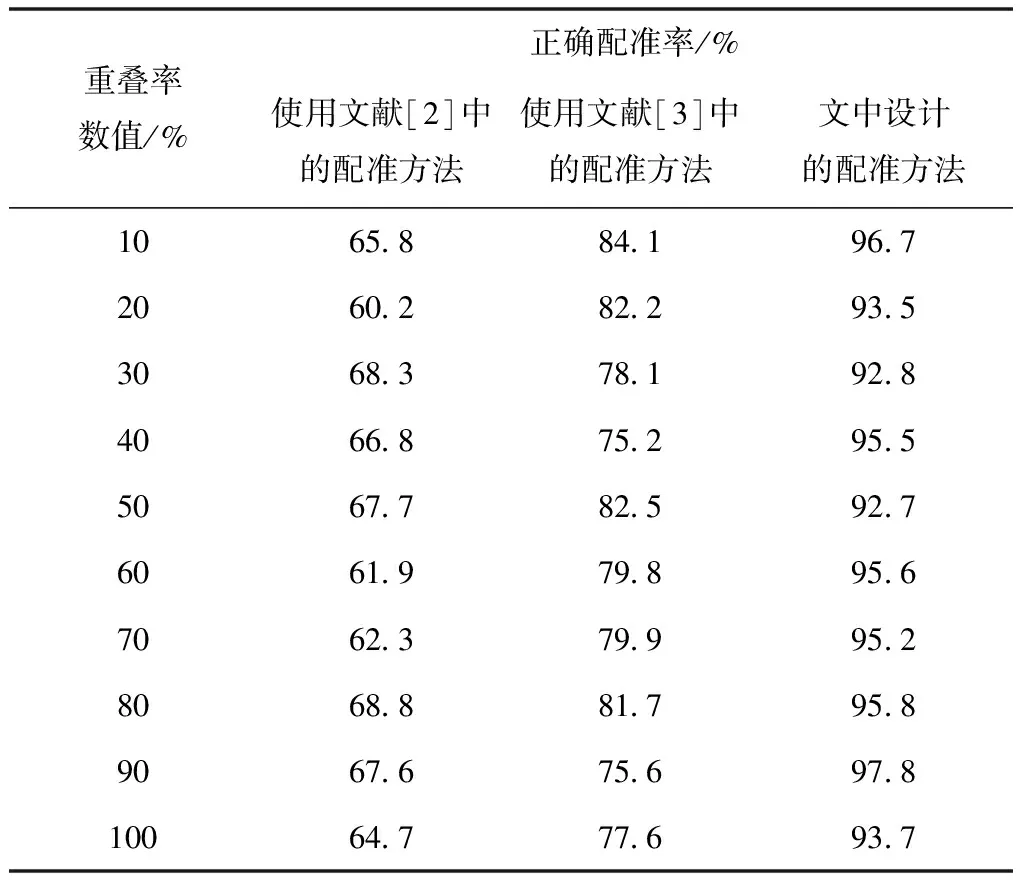
表3 正确配准率结果
由表3所示的正确配准率结果可知,在三种不同的配准方法控制下,变换实验准备图像的重叠率后,文献[2]表现出的正确配准率数值在70%以下,正确配准数值较小,而文献[3]中的配准方法表现出的正确配准数值在80%左右,正确配准效果较好。文中设计的配准方法产生的配准数值在95%左右,图像的正确配准率最大。
保持上述实验环境不变,统计上述15组配准图像中每组图像中的总帧数,以上述配准过程运行的时间为运算基础,计算三种不同配准方法产生的配准速度,配准速度结果如表4所示。
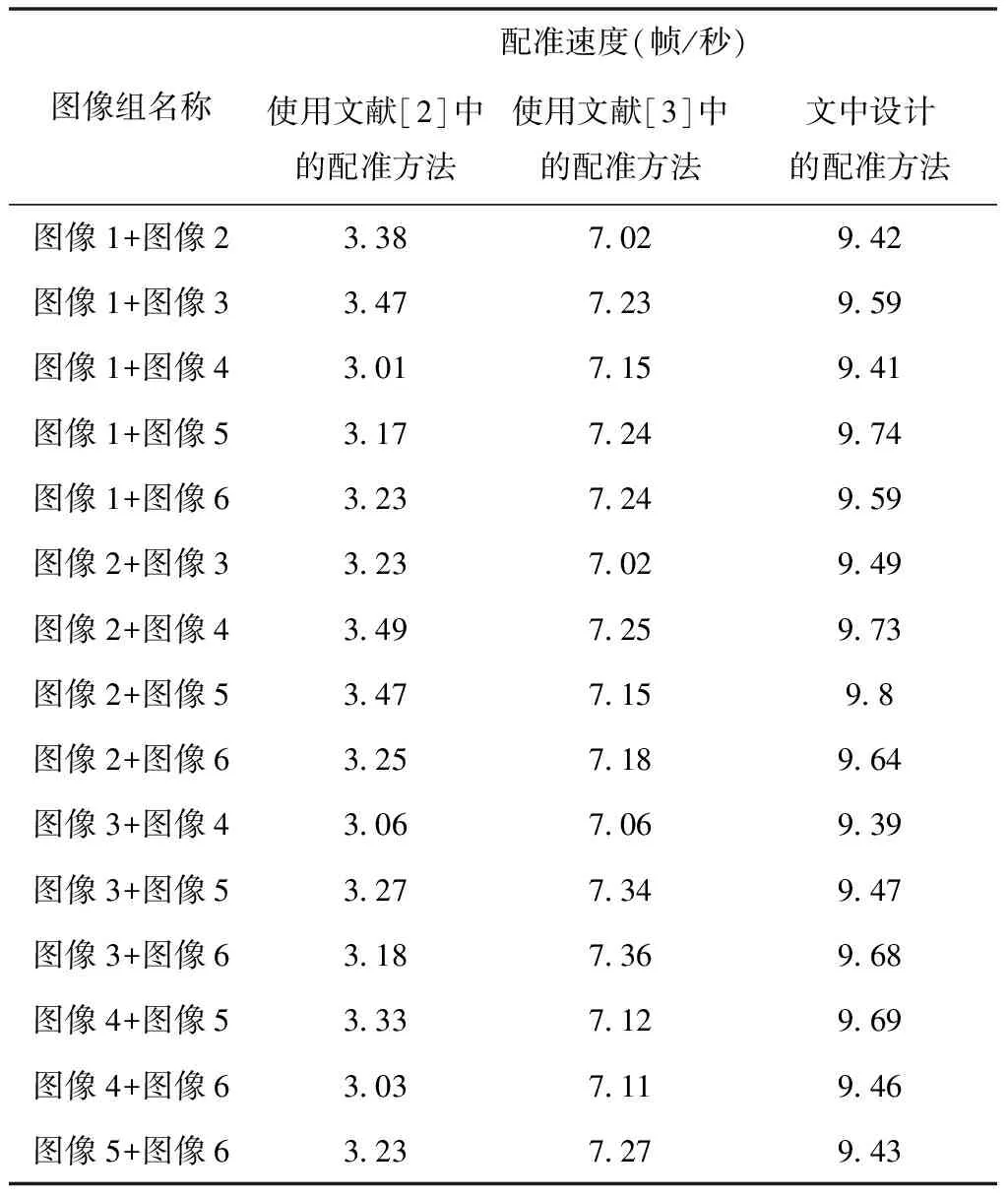
表4 三种配准方法的配准速度
由表4所示的配准时间结果可知,控制三种配准方法处理相同的图像组合,对于相同的图像组合,三种配准方法表现出了不同的配准速度,根据表中的速度数值可知,文献[2]中的配准方法实际表现出的配准速度在3帧/秒,1秒钟实际配准图像帧数数量较少。文献[3]中的配准方法表现出的配准速度在7帧/秒,单位时间配准图像的数量较多,而文中设计的配准方法在单位时间内配准的图像帧数在9帧以上,与两种现有的配准方法相比,文中设计的配准方法在单位时间内实际配准帧数数量最多。
在上述实验环境下,定义三种配准方法的配准精度,配准精度就可表示为
(7)
其中,p,q分别表示图像配准点,N表示总的配准点数量,R表示配准位姿态参数,t表示配准时间。利用上述精度计算公式计算三种配准方法控制下的图像配准精度,配准精度结果如表5所示。
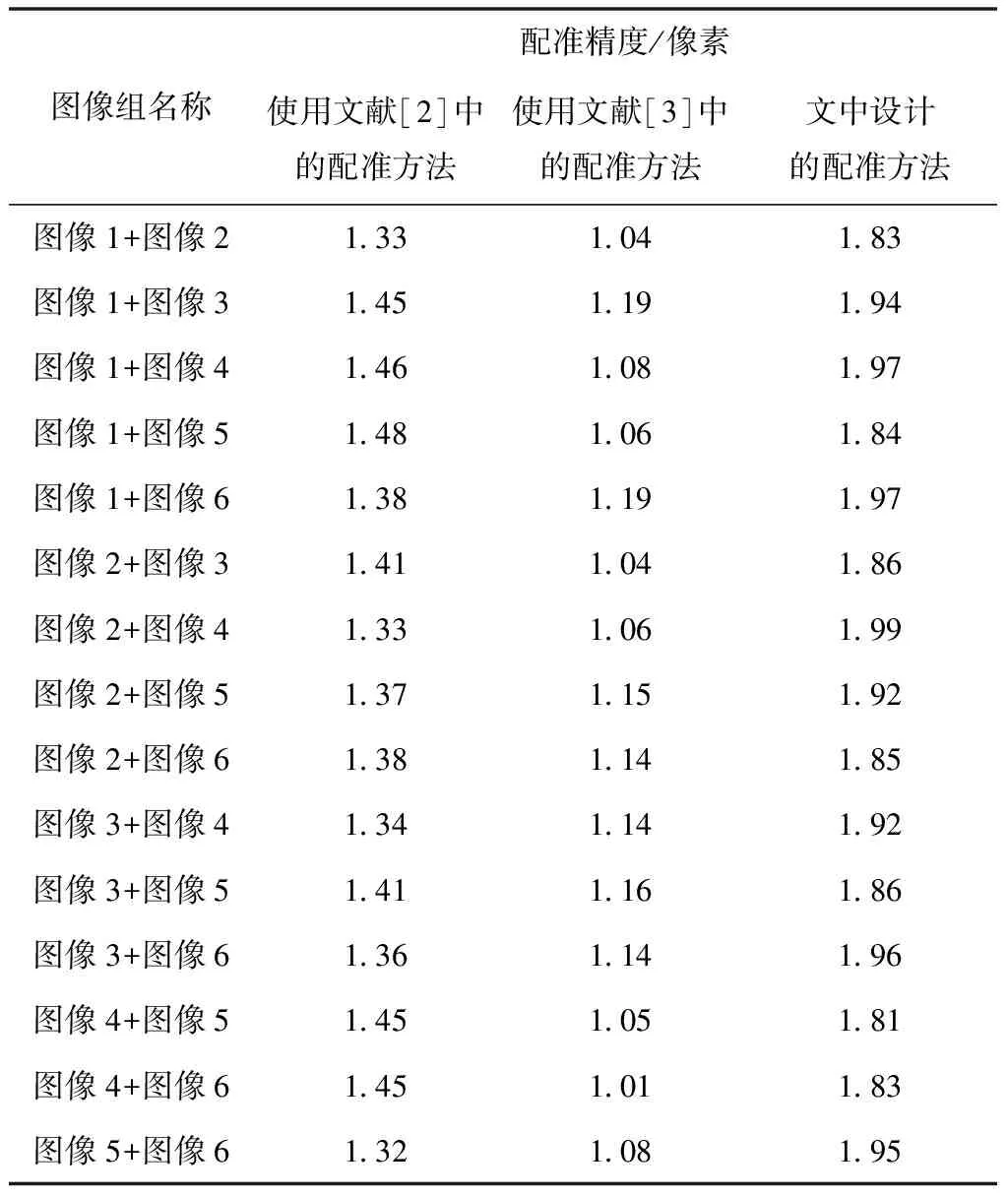
表5 三种配准方法的配准精度
根据表5所示的配准精度结果可知,文献[3]中的精度配准数值最小,配准数值在1帧左右,文献[2]中的配准方法最终产生的配准精度在1.5帧左右,实际配准过程中产生的精度数值较大,而文中设计的配准方法最终产生的精度数值在1.9帧左右,与两种文献中的配准方法相比,文中设计的配准方法实际的精度数值最大。
综合上述实验结果可知,文中设计的配准方法的自适应程度高,对噪声灰度值的抑制效果较好,配准效果较佳,体现在实际的正确配准度数值最大、配准速度最快且实际的配准精度最大方面,适合在实际配准过程中运用。
4 结束语
1)利用Cult3D技术的优点,研究一种倾斜摄影图像前景自适应配准方法,利用图像前景中计算得到的前景灰度数值,构建一个归一化处理公式,配准数值在95%左右,精度数值在1.9帧左右,提高现有配准方法的正确配准率。
2)根据孔径方位角度数值的判定,提高摄影图像分辨率数值,间接增加图像的信噪比,在单位时间内配准的图像帧数在9帧以上,保证图像前景散射数值的精度增强了原有配准方法的自适应性,提高前景图像实际的配准速度,为今后研究图像前景配准方法提供了一种新的研究方向。
