基于电压反馈VSVPWM三电平中点电位平衡控制
2022-12-24邱玉林
王 璐,范 波,邱玉林
(1.河南科技大学信息工程学院,河南 洛阳 471003;2.中信重工机械股份有限公司,河南 洛阳 471003)
1 引言
三电平中点电位不平衡问题会使得开关器件由于承受电压的不同,造成器件的使用寿命缩短,电压输出的波形发生畸变等问题,所以中点电位不平衡是三电平控制需要研究的热点方向[1]。在解决中点电位不平衡的问题上,可以从硬件和软件上进行,从硬件方面主要是改变电路的拓扑结构,例如:在电路的直流侧与电容之间加入换流器,使得中点电流不流经电容,从而不会造成电压不平衡的变动发生[2]。但是由于在硬件上额外增加了元器件,会使得器件的采购成本增加,因此在经济上限制了该方案的具体实施应用。
在另一方面是在软件上,主要通过在控制策略的设计过程中加入一些算法来解决这个问题,这种方式不仅可以不增加硬件设备从而节约成本,而且可以减少系统的体积。
当VSVPWM方法中点电压偏移时,需要平衡中点电位的两个成对的小矢量幅值大小不同,器件动作的开关损耗高,无电压反馈等问题[3],本文提出了一种基于电压反馈的VSVPWM方法,克服了VSVPWM调制在产生扰动过程中的中点电压偏移,加入电容上的电压作为反馈对系统进行控制而达到快速平衡,最后通过仿真进行验证。
2 NPC型三电平变流器的拓扑结构
NPC三电平变流器的电路拓扑结构每一相有4个功率开关器件分别为VSi1、VSi2、VSi3、VSi4,4个续流二极管Di1、Di2、Di3、Di4,其中(i=a,b,c),两个钳位二极管,两个电容C1、C2在直流侧串联起来,并且C1=C2,如图1所示,以电源的中点为电压参考,每相将输出1,0,-1(p、o、n,)三种电平[4]。
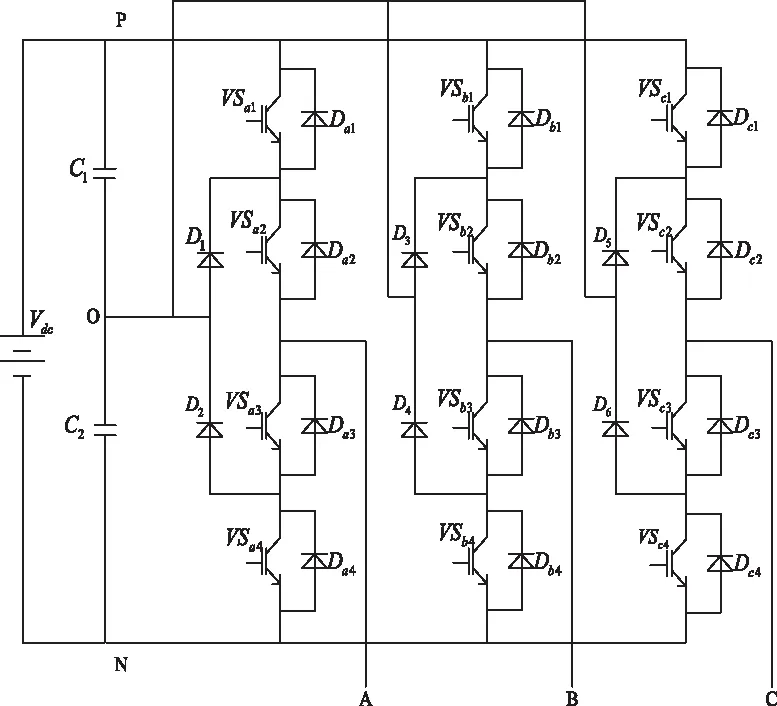
图1 NPC三电平变流器的拓扑结构
根据上述的分析,则三相的输出共有33=27个开关状态,即为27个矢量状态[5],则这些矢量在空间中的分布如图2所:
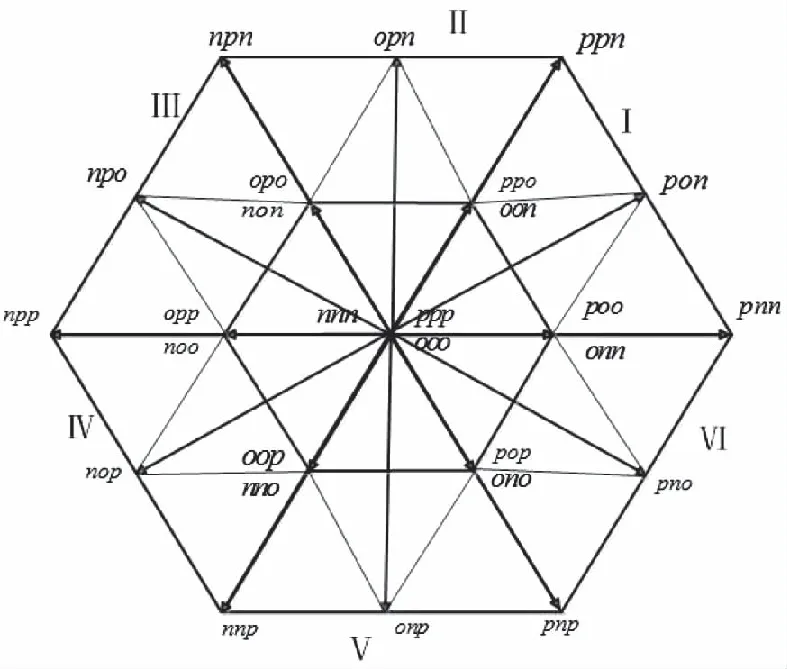
图2 NPC三电平变流器空间矢量图
3 基于中点电位电压反馈的不平衡问题控制策略
3.1 基于中点电位电压反馈的不平衡问题控制策略
VSVPWM调制原理将第Ⅰ扇区划分成5个小扇区,分别为A、B、C、D、E扇区[6],具体划分如图3示。
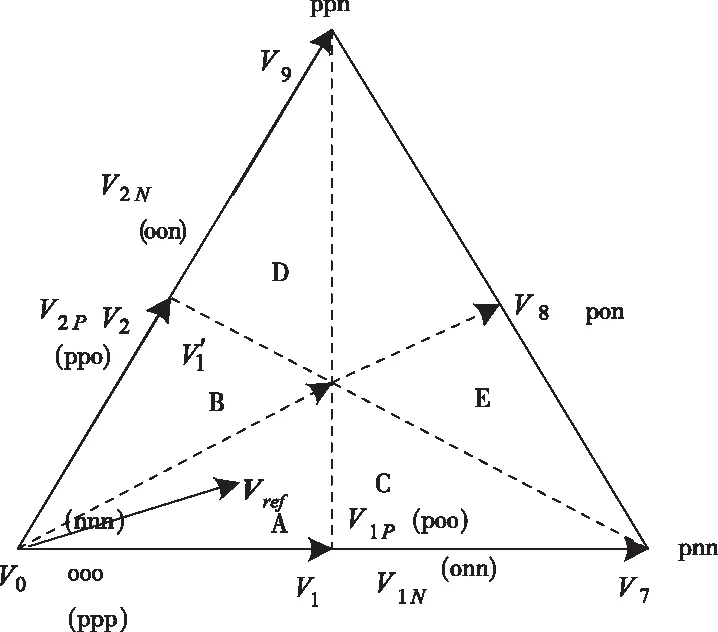
图3 VSVPWM调制矢量合成关系图


(1)
当中点电流不平衡时,为了达到平衡的目的,其中大矢量V9的中点电流为0,参考矢量Vref采用NTV矢量合成原则,将矢量之间重新组合,使得流过中点的电流为0[7]。
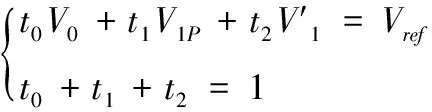
以参考矢量Vref在D扇区为例,令采样控制周期TS为单位时间1进行分析,则此时的参考电压矢量合成关系为
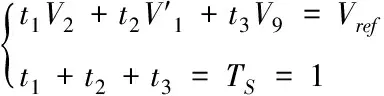
(2)
但是由于这种调制方式可以在一定程度上等效为九段式调制,使用成对的小矢量,造成开光损耗比较大,动态响应比较慢,并且系统没有对中点电压进行反馈闭环控制[11],因此,当产生扰动时,这种方式自然恢复过程通常会很慢,并且并没有解决由于控制策略而产生偏移积累误差问题[13]。
3.2 基于中点电位电压反馈的VSVPWM调制原理
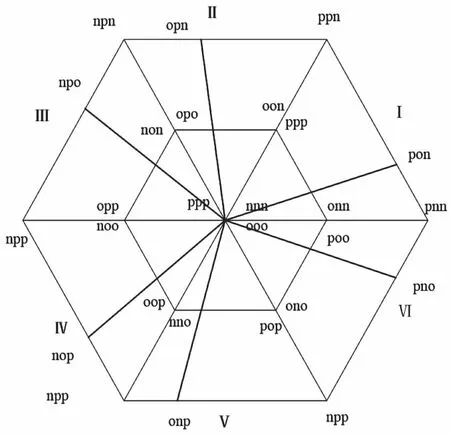
图4 三电平中点电位偏移时空间矢量图
电压偏移后的矢量图如图4所示,基于中点电位电压反馈的VSVPWM调制方法中引入了中点电位电压的偏移系数k和调制度n,其中

(4)
k表示中点电位电压偏移的程度,当k=1时,表示中点电位电压平衡,当k与1的偏离值的大小与中点电位偏移的程度成正比;UC1为C1电压,UDC为直流侧电压。
当中点电压不平衡时,采用改进的VSVPWM方法如图5所示,这样不仅可以使得平衡中点电位电压的速度更快,而且器件开关动作的次数也变得更少。
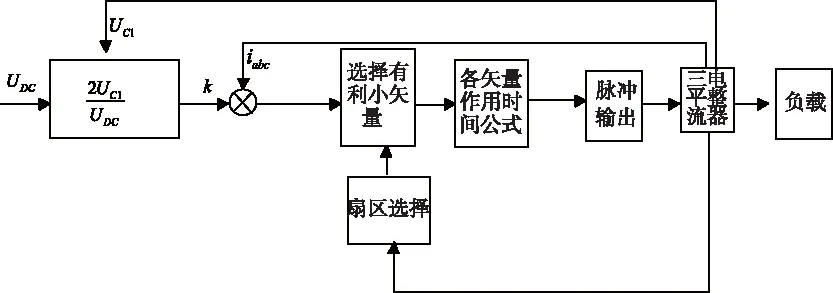
图5 改进的VSVPWM调制方法框图
由图5可知,需要测量的量有:输出侧电压(Uabc)、相电流(iabc)、直流侧电压(UDC)和电容器C1的电压UC1,该控制策略中采用电容电压UC1作为反馈量。
针对图5中的扇区选择,以第Ⅰ扇区为例进行分析,将它重新以角平分线为边界,重新划分为3个部分,分别为:A,B、C扇区,参考矢量为Vref=|Vref|(cosθ+jsinθ),扇区的划分图如图6所示,其它5个大扇区划分也是如此分析。
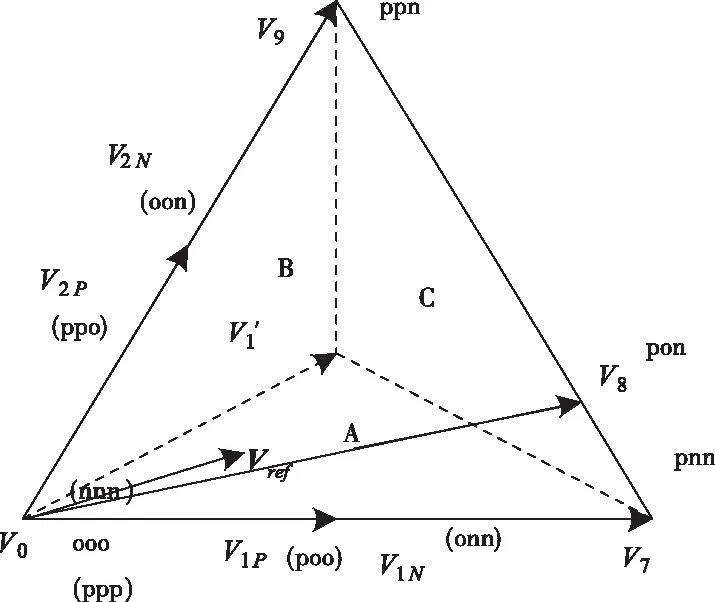
图6 改进的VSVPWM调制矢量合成图
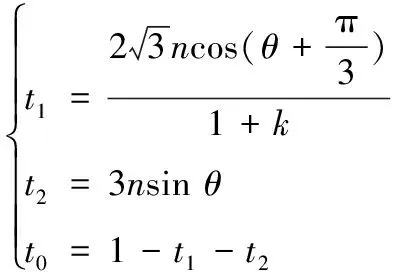
当Vref位于坐标系的A扇区时,k=1中点电位平衡时,参考矢量合成关系为:
(5)
因此各个矢量的作用时间为:
(6)

当中点电压不平衡时,选择不同情况选择不同的小矢量,具体分以下情况进行讨论,见表1。
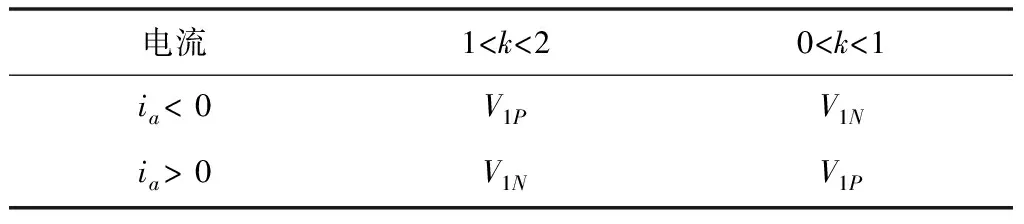
表1 有利于平衡中点电位的小矢量选择表
经过分析上述四种情况,可以将其归纳为两类:

(7)
由上式(7)可得到作用时间为
(8)
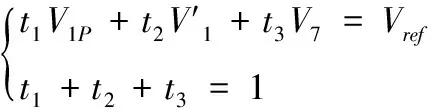
若t0<0,则说明调制度比较大的情况下,矢量Vref不能用V0来进行合成,此时用V7替代V0合成Vref矢量,则代替后的Vref合成表达关系为
(9)
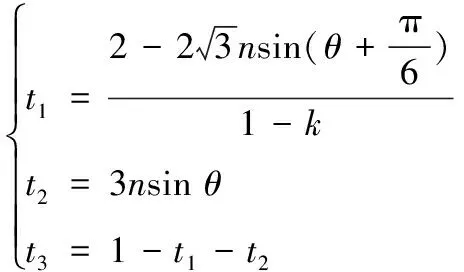
由上式(9),可重新得到各个矢量的作用时间为
(10)
(11)
由上式(11)可得到作用时间为
(12)
若t0<0,则说明调制度比较大的情况下,矢量Vref不能用V0来进行合成,此时用V7替代V0合成Vref矢量,则代替后的Vref合成表达关系为
(13)
由上式(13),可重新得到各个矢量的作用时间为
(14)
(15)
由上式(15)可得到作用时间为
(16)
当中点电压不平衡时,情况与在A扇区相似,则参考矢量Vref的合成关系为

(18)
由上式(17)和(18)可以的得到各矢量的作用时间为
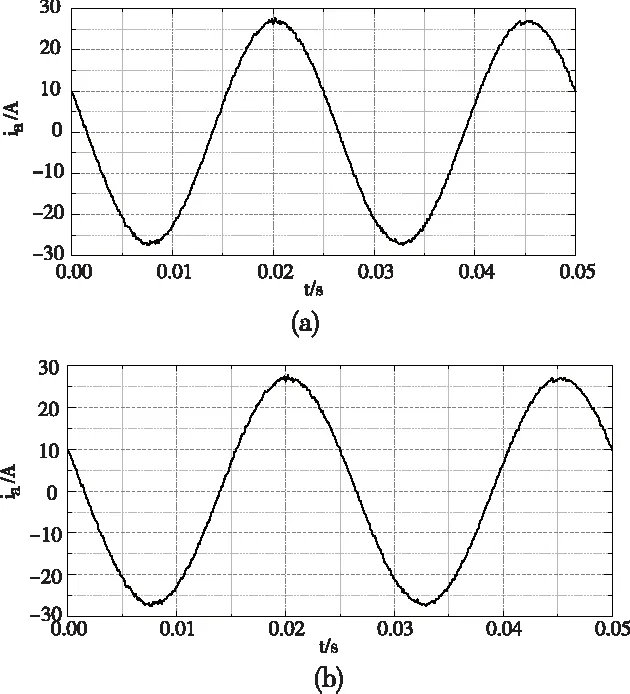
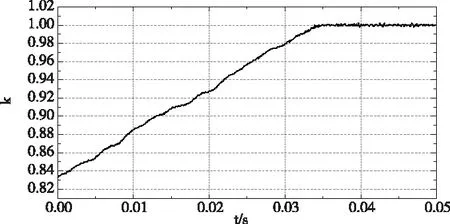
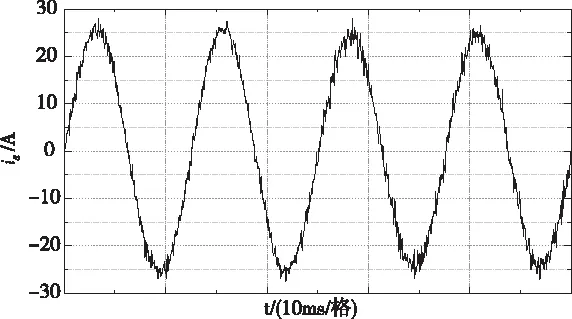
当kia (19) 当kia>ia时 (20) VSVPWM调制方法的开关顺序动作如表2所示(以第一扇区为例)[15]。 表2 VSVPWM的开关序列(以第一扇区为例) 本文提出的基于中点电位电压反馈VSVPWM方法具有不同的切换顺序,以第Ⅰ扇区的A扇区为例,开关顺序动作如表3所示。其它扇区可以按照类似的方式对开关序列顺序进行选择。 表3 基于中点电位电压反馈的VSVPWM的开关序列 为了验证所提出算法的可行性,利用matlab搭建了三电平仿真平台,其中异步电机参数:电机极对数P=2,转动惯量J=0.19kg·m2,定子电阻Rs=0.435Ω,转子电阻Rr=0.816Ω,定子漏电感Lls=0.002H,转子漏电感Llr=0.002H,定转子互感Lm=0.069H,控制周期为100μs;基波频率为50Hz;电机功率为4kW;负载为25 N·m;直流侧的电压为600 V,C1=C2=3500μF,调制比为0.85。 系统的matlab仿真图如图7所示。 图7 Matlab仿真模型图 当电容C1上的电压UC1与电容C2上的电压UC2偏移差为50 V,仿真结果如图8~11所示,其中(a)表示VSVPWM算法,(b)表示基于中点电位电压反馈的VSVPWM算法。 图8 电容电压平衡仿真图 图9 ia电流仿真图 图10 输出电压uab仿真图 图11 k的波动图 由图8可以看出,VSVPWM方法在0.05s时还没有对中点平衡起作用,与之相比,改进的VSVPWM方法由于加入了反馈环节,中点电位在0.034s就趋于平衡,表明该方法具有较好的动态性能,选择一个小矢量能够较快的控制中点电位,且平衡时中点电压以300V为中心进行波动,同时,由图9和图10可看出采用反馈的电压波形质量较好,电流有良好的跟随性,图11可以看出k的曲线能够反映电容的电压在不断趋于中点平衡状态,图12中点电压波动图可以看出电压偏移不超过2V,控制效果比较理想。 为进一步验证控制算法性能,选择DSP型号为TMS320F28335作为芯片,开关器件用IGBT,搭建实验平台进行验证,控制周期为1ms,驱动电路为PSH12012;直流侧的电压为600V;C1=C2=3500μF,异步电机的额定电压为380V,频率为50Hz,极对数为2,滤波电容型号为STM-1700-0.47,其中该实验为电机的空载状态下进行验证,系统框图如图12所示。 图12 中点电压波动图 实验结果如下图所示。 图13 输出线电压Uab图 图14 ia电流仿真图 图15 平衡时中点电压波动情况图 在实验过程中,由图13和图14可知,基于中点电位电压反馈VSVPWM三电平电位平衡控制算法下的输出线电压波形质量较好,由图15可知系统达到平衡状态的中点电压波动在3V之内,具有良好的平衡中点电压的能力,实验进一步验证了算法的可行性。 本文针对三电平中点电位不平衡会导致电压输出产生畸变并伴随低次谐波,同时还会影响开关器件的使用寿命等问题。提出一种基于中点电位电压反馈的三电平VSVPWM调制,在中点电位偏移时对扇区进行分区,通过判定kia与ia之间大小对比关系,来选择适合作用的小矢量及其作用的时间,由各矢量的作用时间得到器件的开关序列。最后搭建了仿真和实验,结果表明该调制方法能够对中点电位偏移的问题进行解决,同时具有开关损耗小,响应速度快的特点。
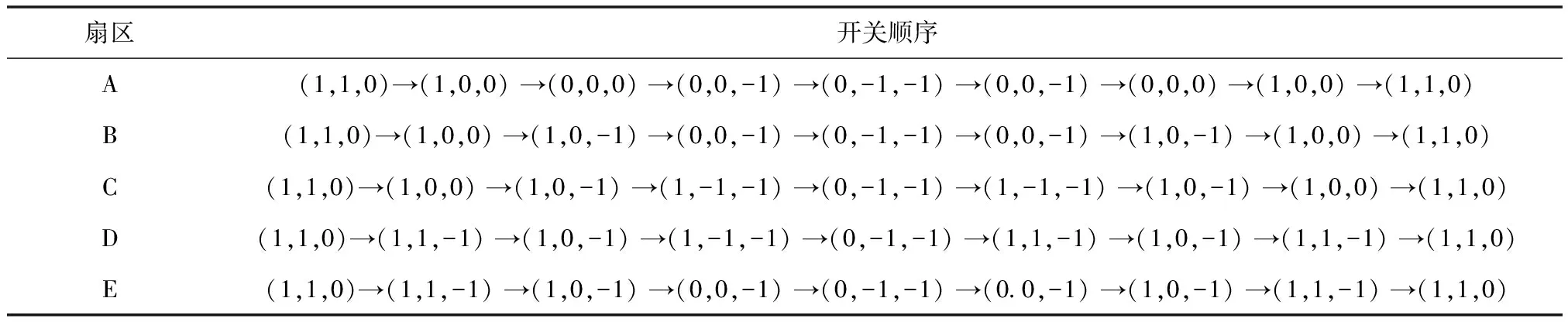
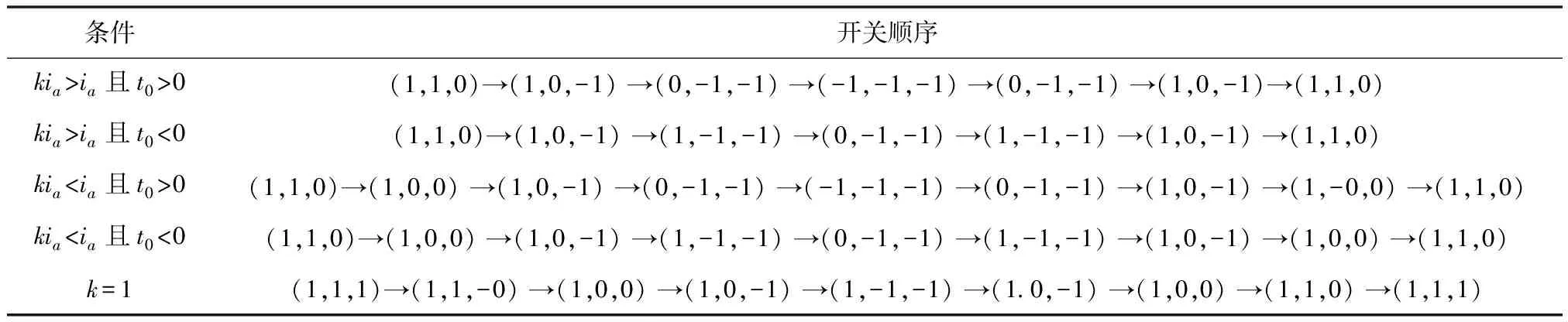
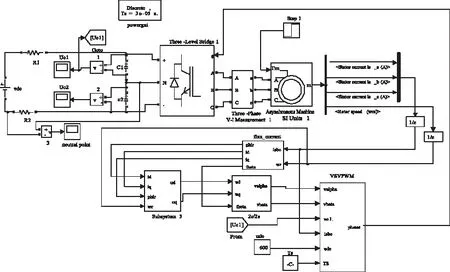
4 仿真结果及分析验证
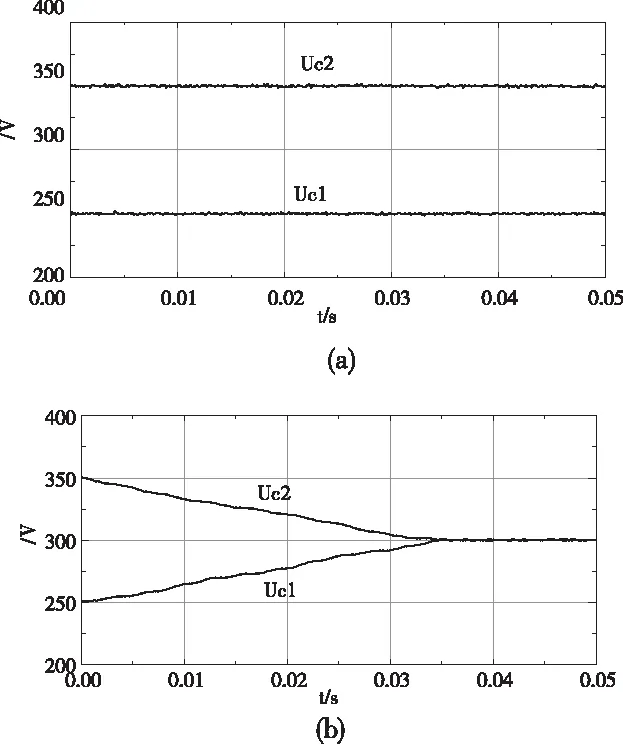
4.1 仿真验证

4.2 实验验证

5 结论
