基于改进型VSM的V2G充放电策略研究
2022-12-24冯富国王娟娟
冯富国,王娟娟
(大连交通大学自动化与电气工程学院,辽宁 大连 116021)
0 引言
由于全球气候变暖和环境问题的日益突出,各个国家不断加强节能减排和环境保护力度。基于交通低碳化的要求,电动汽车(electric vehicle,EV)以其节能减排的优势,成为汽车领域发展的新趋势。
EV通过电网互联(vehicle to grid,V2G)技术实现与电网能量的高效互动,通过智能充电桩的充放电可以消纳间歇性新能源,从而有效减小新能源发电对电网的波动,提高电网的稳定性。在交互过程中,变换器是实现能量双向流动的接口。因此,为了更好地发挥V2G技术的优势,选择合理、有效的变换器控制方法是关键[1]。
文献[2]在变换器交流侧引入电压电流双闭环控制策略实现了充放电机作为紧急电源的功能,并对变换器输出电压波形的谐波含量进行了分析。文献[3]在文献[2]的基础上提出了一种基于dq同步旋转坐标系下的电压电流双闭环的电压空间矢量控制策略,实现了V2G充电桩能量的双向流动,但未考虑变换器充放电过程中谐波对电能质量的影响。针对充放电机功率因数低和谐波污染大的问题,文献[4]提出了直流到直流(direct current/direct current,DC/DC)变换器在充电模式下采用恒流恒压控制,在放电模式下采用电流负反馈的控制策略,从而在实现能量双向流动和提高功率因素的同时有效地消除谐波。文献[4]虽然考虑了谐波的影响,但未考虑EV在充放电过程中缺乏惯性和阻尼,入网后会一定程度地影响电网的稳定性。文献[5]提出了基于虚拟同步机(virtual synchronous machine,VSM)EV的V2G充放电控制策略,降低了对电网的冲击,提高了电网稳定性。文献[6]在基于VSM控制策略的基础上,加入模型预测控制(model predictive control,MPC),提高了系统的动态性能。虽然文献[5]和文献[6]都关注了大规模EV充放电由于缺乏惯性和阻尼性对电网稳定性的影响,并且文献[6]在原有研究基础上加入MPC提高了系统的动态性能,但两者都未考虑谐波污染对电能质量的影响。
针对上述问题,本文考虑在提高功率因数、减小谐波污染的前提下,实现EV到电网能量的高效转换。同时,在实现智能充电桩对新能源消纳的过程中,为提高充放电功率的控制精度,本文提出了在VSM双环控制的电流环中引入超螺旋(super twisting,ST)二阶滑膜控制(silding mode control,SMC)策略[7-8]。通过在MATLAB/Simulink环境下搭建EV充放电并网模型,进行该控制策略与传统VSM双环比例微分(proportional integral,PI)控制策略的仿真结果对比分析。分析结果验证了该控制策略的可行性和有效性。
1 EV电路拓扑及数学模型
图1为EV充放电主电路拓扑图。

图1中:Uoa、Uob、Uoc为交流侧母线三相电压;L、C构成LC滤波器;R为等效滤波电阻;Ua、Ub、Uc为交流到直流(altemating current/direct curect,AC/DC)变换器交流侧三相电压;iLa、iLb、iLc为交流侧流入电流;Udc为直流母线电压。
图1中,主电路拓扑分为两部分:左侧为DC/DC变换器拓扑,右侧为双向AC/DC变换器拓扑。其中,EV直流变换器由DC/DC非隔离双向半桥式电路构成,又称双向Boost/Buck电路。EV充放电控制分为两部分,分别是直流侧DC/DC控制和交流侧VSM控制。双向DC/DC变换器如图2所示。

图2中:开关管和S1、S2同时动作且动作方向相反;串联内阻r代表储能元件;D1、D2为续流二极管;R为直流母线侧的等效负载。通过对开关的控制,功率可以在储能(低压侧)和直流母线(高压侧)之间双向流动,电路结构简单,控制方便,可靠性高。
EV充电桩与电网互联时交流侧接口变换器主电路为双向AC/DC三相电压源型变换器。图3为双向AC/DC变换器结构框图。直流侧为EV高压侧电容,主电路拓扑选用含LC滤波的两电平逆变器。

图3中:R、L、C分别为变换器交流侧等效滤波电阻、电感和电容;Ua、Ub、Uc为变换器交流侧三相电压;iLa、iLb、iLc为变换器交流侧三相电流;Uoa、Uob、Uoc为交流母线三相电压;Udc为直流侧母线电压。
定义变换器的开关函数如式(1)所示。
(1)
式中:Sk为变换器开关函数,k为变换器的a、b、c三相。
由基尔霍夫定律,可得双向AC/DC变换器交流侧电压动态方程如式(2)所示。
(2)
式中:uabc为变换器交流侧三相电压,V;iLabc为变换器交流侧三相电流,A;uoabc为交流母线三相电压,V。其中uabc=Skudc。
经过Clark变换得到两相静止坐标系数学模型。变换矩阵如式(3)所示。
(3)
通过Park变换进一步将两相静止坐标系变换为两相同步旋转坐标系数学模型。变换矩阵如式(4)所示。
(4)
结合式(3)和式(4)可以得到三相静止坐标系到两相旋转同步坐标系。变换矩阵如式(5)所示。
(5)
经式(5)变换,可得:
(6)
式中:ω为角速度,rad/s;iLd、iLq为变换器交流侧三相电流iLabc的dq轴分量,A;uod、uoq为交流母线三相电压uoabc的dq轴分量,V;ud、uq为交流母线三相电压uabc的dq轴分量,V,ud=sdudc,uq=squdc;udc为直流侧母线电压,V。
2 EV控制策略
2.1 DC/DC控制策略
直流侧部分采用电压电流双闭环控制。图4为电压电流双环控制框图。

图4中,为了获得稳定的电压来实现功率的双向流动,通过将给定Uref和反馈值U进行比较,再经过控制器补偿后得到iref。iref与电流实际值进行比较,得到的差值送入PI控制器进行校正。校正后的值输入脉冲宽度调制(pulse width modulation,PWM)产生脉冲信号控制绝缘栅双极型晶体管(insulated gate bipdar transistor,IGBT)的导通和关断。
2.2 VSM数学模型
VSM数学模型由四个部分构成,分别是功率调节器、励磁调节器、电气部分和电压电流双环控制。
①功率调节器。
同步发电机机械功率的输出与转子的关系如式(7)所示。
(7)
式中:ω为转子角速度,rad/s;ω0为空载转子角速度,rad/s;ωN为额定转子角速度,rad/s;Pm为机械功率,ω;Pe为电磁功率,ω;D为阻尼系数;J为虚拟惯量;δ为功角,rad/s。
②励磁调节器。
发电机机端电压幅值Um与参考电压Uref相比较后得到电压偏差,经PI调节器后供给发电机励磁绕组。参考电压Uref的表达式如式(8)所示。其Uref随输出无功功率的增加而减小。
Uref=UN+Kv(Qref-Q)
(8)
式中:UN为空载电压,V;Kv为无功电压下垂系数;Qref为无功功率参考,Var;Q为输出无功功率,Var。
③电气部分。
考虑到电压源逆变器模型的精确程度,选择dq坐标系下的同步发电机电压二阶方程[9]作为电气部分,如式(9)所示。
(9)
式中:ud、uq为输出电压dq轴分量,V;id、iq为输出电流dq轴分量,A;Ed为励磁电压,V。
④电压电流双环控制。
由式(6)可知,dq轴存在耦合关系,不利于dq轴的独立控制,因此需要对电压电流进行解耦控制。图5为电压电流解耦控制框图。

2.3 电流环滑模控制器设计
SMC电流控制的基本思想是通过设计滑膜趋近律将跟踪所需的状态变量朝向其所需的参考滑膜面滑动。基于此,在dq坐标系下,定义两个滑模面函数S1和S2,如式(10)所示。
(10)

(11)
令S=0,可求得电流环滑模控制系统等效控制率Ueq为式(12):
(12)
式(13)所示的Super-twisting控制算法[10],由两部分组成。第一部分u1为滑膜面的一个连续函数。第二部分u2为滑膜面在时间上的积分。
(13)
式中:ε、k为正的控制增益;ρ为系统达到二阶滑动模态的参数,当其取值为0.5时,系统将最大可能实现二阶滑动模态。
为保证Super-twisting二阶滑膜控制结构在有限时间内收敛[11],需满足条件:
(14)
式中:Km、KM、φ分别为二阶滑膜变量中三个泛函的未知量,其取值取决于具体的系统,且均为大于0的常数。
由式(13)和式(14),定义切换控制率usw:
(15)
式中:ε>0,k>0。
由式(12)和式(15)可得滑膜控制的控制率为:

(16)


(17)
式中:只要ε、k取正值,则电流滑模控制系统稳定。
3 仿真结果对比与分析
本文采用传统VSM双环PI控制策略与改进型VSM控制策略SMC分别进行仿真。首先,将PI和SMC控制的模型分别运行0~1.4 s,将EV输入功率设为20 kW。
PI控制的并网电流波形如图6所示。

SMC控制的并网电流波形如图7所示。

由于采用VSM控制策略的变换器具有一定的惯性和阻尼性,因此两种控制都需要一定的时间才能达到稳定状态。但不同的是:基于SMC控制的并网电流波形在0 s时就趋向稳定,而基于PI控制的并网电流波形在0.4 s才趋向稳定;SMC控制的并网电流波形在0.5 s就达到稳定状态,而PI控制的并网电流波形在1.2 s才大致达到稳定状态。这说明基于ST二阶SMC在削弱传统滑模控制器抖振的基础上,其启动特性和鲁棒性比PI控制器更有优势。
PI控制的并网A相电流谐波分析如图8所示。图8中,谐波含量为2.14%。

SMC控制的并网A相电流谐波分析如图9所示。
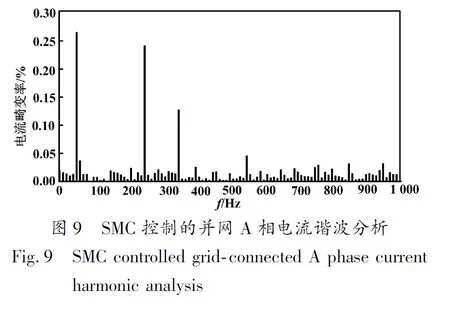
图9中,谐波含量为0.81%。这表明基于SMC的虚拟同步控制策略能够有效降低并网电流谐波。
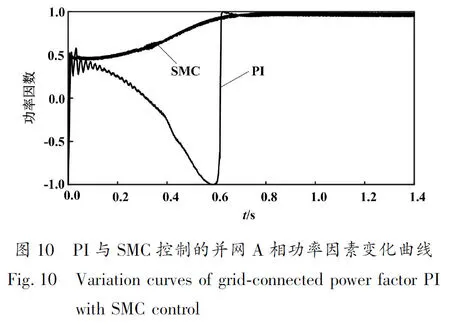
PI与SMC控制的并网A相功率因素变化曲线如图10所示。虽然PI和SMC控制的功率因素在稳定时都接近1,但由于SMC控制下的响应速度更快,SMC比PI控制下的功率因素接近于1的时长更长。这表明改进型的VSM技术在提高系统动态响应特性的同时,还能显著提高并网功率因素。
为了验证EV在充放电过程中输入功率的不断变化对系统的影响,分别基于SMC和PI控制下的仿真模型运行,并将仿真时间设为5 s。
在0~4 s内,EV放电(输入功率为正),在时间0~1 s、1~2 s、2~3 s、3~4 s 内分别设置输入放电功率为20 kW、120 kW、20 kW、40 kW;在4~5 s内,EV充电(输入功率为负),输入充电功率为-50 kW。
PI和SMC控制下EV充放电功率输出曲线分别如图11、图12所示。

图11、图12所示曲线反映了EV输出功率随输入功率的不断变化而变化,既表明了在VSM控制策略下的功率在突变的情况下所具有的惯性和阻尼性,又体现了变换器对输入功率的跟踪特性。虽然以上两种控制都能追踪输入功率的变化,但基于PI控制的输出功率波形比SMC控制的震荡幅度大,并存在一定的超调。而SMC控制下的几乎无超调,且功率变化平稳,有较强的抗干扰能力。这说明基于SMC的控制策略提高了功率的控制精度。

SMC和PI控制的并网A相谐波总畸变率(total harmonic current distortion,THD)如图13所示。在稳定状态下,两种控制下电流谐波含量都低于5%,并且SMC控制下的电流谐波含量在任意稳定状态下都明显小于PI。
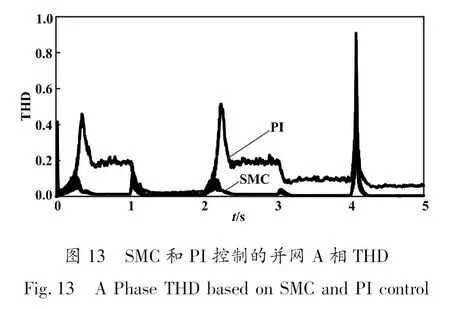
综上所述,改进型的VSM控制策略能有效提高系统的动态品质和鲁棒性,降低EV充放电时并网电流的畸变率,提高功率因素,抑制直流侧电压波动。
为了更好地研究控制器的性能、验证鲁棒性,分别在SMC和PI控制下运行仿真模型。SMC和PI控制下不同开关频率下的并网A相电流谐波含量如图14所示。
SMC显示了相同的性能更高的开关频率,THD小于2%并且总是获得高功率因数,传统的PI控制在开关频率50~60 kHz下,系统无法稳定地注入同步电流,需要调整PI参数,而基于SMC控制的系统在开关频率的上升中表现出较强的鲁棒性。

SMC和PI控制下输入功率不同THD和功率因素变化分别如图15和图16所示。该结果表明,随着输入功率的不断上升,SMC表现出更高的功率因素和更低的谐波含量。

基于以上分析,在不同开关频率和输入功率的影响下,基于SMC控制的系统的鲁棒性更好。
4 结论
将改进型双向VSM控制方法用于EV充放电并网的控制策略中,使EV与电网能量交互时,与传统同步发电机一样具有惯性和阻尼性,降低了EV并网对电力系统的冲击。仿真验证结果表明,该控制策略能够有效减少谐波含量、提高功率因素、抑制直流侧母线电压波动、提高系统的动态性能,与传统PI控制器相比鲁棒性更好。使用该控制策略能够使EV通过智能充放电更好地协同新能源发电,对提高间歇性新能源的利用率、减小新能源发电对电网的扰动、提高电网的稳定性具有重要意义。
