北欧腘绳肌训练屈膝肌群的表面肌电特征
2022-12-21董泽华毛文慧
董泽华,毛文慧,王 婷
(南京师范大学 体育科学学院,江苏 南京 210023)
腘绳肌拉伤是短跑、 足球等高速奔跑运动项目中十分常见的运动损伤类型[1]。 腘绳肌损伤后恢复期较长且复发率较高[2-4]。 而北欧腘绳肌训练(Nordic Hamstring Exercise,以下简称NHE)是预防腘绳肌损伤和增强腘绳肌力量的有效手段[5]。以往研究表明[6],NHE 可显著提高股二头肌、半腱肌、半膜肌肌电活性,增强肌肉力量,促使肌肉厚度增加。 NHE 会使双侧腘绳肌的离心峰值扭矩增加, 这可能会增加腘绳肌在强力牵拉时所能承受的力量,从而降低受伤风险[2,7]。另一方面与传统腘绳肌弯举(HC)比较,NHE 能够更有效地提高足球运动员腘绳肌的最大离心力量[7]。
预防是应对腘绳肌损伤的首要原则, 除提高腘绳肌力量外,增强肌群协调性也较为重要。有研究表明[8],肌群协同收缩失调可能是导致腘绳肌损伤的成因之一。 肌肉协同是神经系统用以完成可重复的多关节协作的一种特殊的肌肉共同激活的方式。 由于肌肉骨骼系统给予了人体较大的运动自由度,使得人体运动中的灵活性得到有效保证,而中枢神经系统如何协调众多肌肉之间的活动是运动控制的重要问题[9]。 另一方面,神经系统的冗余性导致运动控制研究的核心问题是中枢神经系统如何协调单个肌肉活动。 肌肉协同模式在表面肌电活动中识别度较高, 中枢神经系统通过协同肌肉的协调激活来简化大量肌肉自由度的概念已被普遍接受[10]。 稳定性和灵活性的概念是我们理解协同作用的核心, 协同的主要功能是确保运动控制的稳定性[11]。 肌肉协同的联合作用能够制定不同的肌肉活动模式,这是完成运动动作任务的必要条件[12]。
通过前人研究[13]我们了解到,在完成NHE 动作过程中,股二头肌、半腱肌、半膜肌存在明确的肌肉协作关系,在肌肉激活时序和激活程度之间存在较强相关。 但目前针对NHE 中屈膝肌群的表面肌电特征和肌肉协作关系的研究主要集中在腘绳肌,而远端肌如腓肠肌等与腘绳肌在NHE 中是否存在肌肉协作关系尚未证实[2,14-15]。 腓肠肌与腘绳肌同为屈膝双关节肌,在跑步、跳跃等众多运动中存在密切的肌肉协同关系[16-17]。因此有理由相信在NHE 过程中腓肠肌与腘绳肌存在肌肉协作关系。 本研究的目的是通过测取NHE 动作过程中的运动学和肌电学数据,分析NHE 中屈膝肌群的表面肌电特征和肌肉协作模式。 同时根据上述资料,本研究假设腓肠肌与腘绳肌在NHE 动作中存在肌肉协作关系, 屈膝肌群共同协调以稳定膝关节,增强运动平衡控制。
1 研究方法
1.1 测试对象
在南京师范大学招募9 名健康男大学生作为研究和测试对象,年龄在20~24 岁之间,受试者无下肢膝关节外伤、肌肉损伤、感染、疼痛等疾病;实验测试前24h 未从事剧烈运动,无肌肉疲劳感, 受试者在了解实验目的和实验过程后自愿签署《知情同意书》。
1.2 研究方法
1.2.1 测试仪器
本实验采用Qualisys 红外高速光学运动捕捉系统(Oqus 300,Qualisys AB,Gothenburg,Sweden)、Delsys 无 线 表 面 肌 电测试系统(Trigno,Wireless Biofeedback System,USA)采集运动学、肌电数据。
瑞典Qualisys 红外高速光学运动捕捉系统由数据采集软件(QTM-Qualisys Track Manager)、计算机、标志杆、标志框架、反光球组成。 6 架红外线摄像机固定于室内进行动作捕捉,有效拍摄范围约长6m,宽2m,高2m,采样频率为100Hz。
美国Delsys 公司生产的16 导肌电系统采集仪(Trigno Avanti, Delsys Inc, Natick, MA, USA),采样频率为 2 000Hz;该仪器主要由16 导表面肌电传感器、数据接收器和放大器主机、配套软件组成。 表面肌电传感器采集和测量滤波的频率范围 20~450Hz,信号采集通道数 16。传感器尺寸:27mm×37mm×13mm,每个传感器质量14g。肌电电极为双差分Ag 电极,正负间距恒定,间距为10mm,基线噪声小于750μV RMS,分辨率可达16 位,共模抑制比大于80dB。
1.2.2 测试方法
广义的教育大数据是指来源于日常教育活动中学生们的行为以及学习数据。而狭义的教育大数据指的是学生在线学习平台、管理系统以及课程管理平台等。
受试者以跪姿开始,踝关节取背屈位[18]。 肘部完全弯曲,双手在面前张开。 测试人员将受试者的脚踝牢牢固定,使双侧踝关节在整个运动过程中保持与地面接触, 同时要求受试者腰腹收紧,从头到大腿的身体部分保持笔直,头部位置中正,不可低头或仰头。 随后测试人员通过口令指引受试者“尽可能慢地” 向前倾斜, 受试者努力收缩腘绳肌来抵抗身体前倒的力,匀速落至释放角(Break point angle:北欧腘绳肌训练动作中的释放角表示练习者无法再抵抗重力力矩而开始急速前倒的膝关节角度,定义为身体下落角速度首次超过10°/s 时的角度[19]),在失控前倒的最后阶段用手掌缓冲。 16 道便携式无线遥测肌电系统采集仪和Qualisys 红外高速光学运动捕捉系统同步采集受试者完整NHE 动作, 共记录3 次正式实验数据,每次间隔3min。
1.2.3 测试方法
1)表面肌电测试[20]:选择优势腿放置肌电电极。 受试者将目标部位周围的毛发剃掉,然后用酒精清洁皮肤,以备放置肌电电极。 使用无线EMG 电极测量股二头肌(长头)和半腱肌、腓肠肌(内、外侧头)、比目鱼肌的肌电信号,电极条形长度为10 mm,条形宽度为1 mm,活动记录点之间距离为1 cm。最大自主等长收缩(MVIC)测试[6]:测试之前,测试人员指导受试者进行10min 的标准化热身活动。 股二头肌(长头)、半腱肌:受试者呈俯卧位,躯干、臀部固定,右侧膝关节屈曲20~30°,受试者腘绳肌发最大力对抗挡板给与的阻力。 腓肠肌(外侧头)、腓肠肌(内侧头)、比目鱼肌:受试者坐在带有靠背的椅子上,测试人员在后侧抵住椅背,受试者右侧前脚掌抵在墙壁,膝关节完全伸直,随口令尽全力做踝关节跖屈动作。 在测试过程中,研究人员通过“发力”的口令促使受试者全力收缩肌肉,并予以鼓励,收集每块肌肉5s 最大等长收缩时的肌电信息,去除第 1s 和最后 1s 数据, 取中间 3s 数据。 每名受试者进行 2 次MVIC 测试,每次测试间隔2min,取峰值最高一次数据。
2)运动学数据测试:在受试者外踝、股骨外上髁、大转子粘贴反光标记点,使用运动捕捉系统测取运动学数据。 静态建模时,将膝关节伸展角度定义为大腿相对于小腿的运动,将数据输出保存为V3D 格式以待进一步处理。
1.2.4 同步方法
测试前, 将表面肌电测试仪与运动捕捉数据采集软件(QTM-Qualisys Track Manager)通过传导线同步连接并设置为由触发器(Trigger)统一启动。 测试时,当受试者回答“准备好”后,操作者1 开启无线肌电测试仪并同时喊“就绪”,操作者2听到“就绪”时按下触发器(Trigger)启动并同时喊“开始”,受试者听到“开始”口令后完成动作。
1.2.5 测试要求
1.2.6 数据处理
1)肌电数据:通过Delsys 肌电系统采集仪获得的数据,运用Delsys Analysis 软件对原始肌电数据进行全波整流, 肌电信号经Butterworth4 阶带通滤波,截止频率为10~450Hz,计算均方根(RMS),并对均方根(RMS)进行标准化处理,处理完毕后输出保存为Excel 文件。
2)运动学数据:采用数据采集软件(QTM-Qualisys Track Manager)对获得的数据进行二维运动分析。 膝关节屈曲角的计算是通过在大转子、 股骨外上髁和外踝上的反射标记进行数字化。 大转子与股骨外上髁的连线和股骨外上髁与外踝的连线形成一个角度,定义为前倾角(本研究将动作开始时刻身体前倾角度定义为90°,前倾角度变化区间为90°~0°)。将运动学数据保存为V3D 格式运用Visual3D 软件进行处理,通过前倾角除以时间计算膝关节伸展角速度。
3)数据长度标准化:将计算处理完毕的角速度、膝关节伸展角度、肌电激活百分比以数值形式导入OriginPro(2016)软件进行统一插值,标准化为同等时间长度并输出为Excel 文件保存。
2 研究结果
2.1 动作过程中屈膝肌群肌电激活/ 失活时序特征
动作开始阶段, 半腱肌最先激活并表现出较高的肌电激活水平,随后腓肠肌(外侧头)与比目鱼肌依次激活,股二头肌激活较迟,腓肠肌(内侧头)最后激活。 动作结束阶段肌肉失活时序与激活时序相比,测试肌肉失活时序较集中:比目鱼肌最先失活,腓肠肌(内、外侧头)、半腱肌、股二头肌随后依次失活,除比目鱼肌外其余肌肉失活时序较为相近。

图1 下肢所测肌肉平均激活/失活时序
2.2 下落阶段不同前倾角度屈膝肌群协作特征
在NHE 动作中屈膝肌群肌肉激活水平与前倾角度密切相关,动作前中期,肌电活动水平随前倾幅度的加大而逐渐增加。 在临近释放角发生时刻,腓肠肌(内、外侧头)的肌电活动水平达到峰值;释放角发生时刻,半腱肌的肌电活动水平达到峰值;在72%~83%区间内,比目鱼肌、股二头肌的肌电活动水平依次到达峰值; 短暂波动后所有测试肌肉的肌电活动水平随前倾角度的快速缩小而急剧减弱。
2.3 下落阶段不同角速度肌肉激活特征
NHE 动作过程中股二头肌、半腱肌、腓肠肌(内、外侧头)、比目鱼肌的肌电激活水平与释放角前后的角速度呈现密切关联。 在释放角发生前,身体前倾的角速度始终控制在10°/s 以下,肌电激活水平随身体逐渐前倾而不断增强,在释放角附近肌电活动水平达到峰值;在释放角发生后,角速度急剧增加,在经过短暂维持后,所有测试肌肉的肌电激活水平迅速减弱。
3 分析与讨论
本研究主要检查在北欧腘绳肌训练动作中屈膝肌群的表面肌电特征和肌肉协作关系,研究结果显示如下特征:在进行北欧腘绳肌训练动作中,股二头肌、半腱肌、腓肠肌(内、外侧头)和比目鱼肌的肌电变化趋势呈现较高的一致性,半腱肌最先激活,腓肠肌(外侧头)激活程度最高。
3.1 屈膝肌群肌电激活水平与角速度、前倾角度关系
如图2、图3 所示,NHE 动作中屈膝肌肌电激活水平与前倾角度呈现密切相关,随着受试者前倾幅度的增加,半腱肌、股二头肌、腓肠肌(内、外侧头)和比目鱼肌的肌电激活水平均不断提高,而此时角速度曲线基本稳定,仅有轻微波动,未出现较大变化。 这是由于在NHE 过程中躯干位置的渐进阻力矩会提高神经肌肉的激活水平[14,21]。这说明在NHE 动作过程中,半腱肌是在释放角前的主要发力肌。另一方面,NHE 动作的支点是膝关节,杠杆臂包括整个上半身和下肢,由于NHE 动作不允许躯干弯曲或骨盆倾斜, 因此向前运动的微小增加会导致髋伸肌的内部力矩的急剧增加[20]。 面对逐步增大的力矩需要屈膝收缩对抗前倾的外部力矩, 这也可以解释动作开始阶段腘绳肌肌电激活水平急剧上升的现象。 而当前倾角度到达释放角前,腓肠肌(外侧头)和半腱肌肌电激活水平依次到达峰值,其余肌肉在释放角发生后,即71%~79%区间内达到峰值。 这是由于到达释放角时腘绳肌的腘绳肌已被最大限度激活[19,22]。 在到达释放角后,角速度急剧增加,所有测试肌肉的肌电激活水平在短暂维持后迅速下落并依次失活。 在躯干前倾抵达释放角前,腘绳肌、小腿三头肌的肌电激活程度均以达到较高水平,除股二头肌外,其余肌肉肌电激活百分比均在临近释放角位置达到峰值。 由此可以得出,在NHE 中,屈膝肌的肌电激活水平与前倾角度的变化和释放角发生位置存在密切关联。

图2 平均肌电激活百分比随前倾角度变化曲线
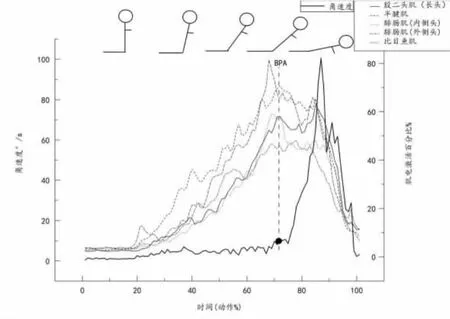
图3 平均肌电激活百分比随角速度变化曲线
3.2 屈膝肌群激活时序特征
半腱肌在NHE 动作过程中最先激活,本研究认为,半腱肌在前倾开始阶段的主要功能可能是协同控制前倾躯干稳定;腓肠肌(外侧头)在半腱肌后激活,与腘绳肌共同分担离心扭矩,减小腘绳肌的扭矩负荷,并在下落阶段协调运动控制,增强躯体稳定平衡。 比目鱼肌的肌电活动最早结束,半腱肌、腓肠肌(内、外侧头)和股二头肌几乎同时结束肌电活动。 半腱肌的肌电活动持续时间最长,腓肠肌(外侧头)在所测肌肉中肌电激活水平最高,同时腓肠肌(内侧头)的肌电激活百分比峰值与股二头肌相近,表明在NHE 运动中腓肠肌虽为远端肌肉,但双关节肌的力量传递机制促使腓肠肌在完成NHE 动作过程积极参与下肢肌群协同, 在稳定运动姿势和肌肉协调控制中发挥积极作用。 而股二头肌、半腱肌、腓肠肌(内、外侧头)、 比目鱼肌在NHE 动作过程中随前倾角度的变化而表现的肌电活动变化趋势呈现较高的一致性, 在开始匀速前倾阶段,肌电活动逐渐增强,在水平角度降低至65°~60°区间时,肌电活动水平急剧增强,肌肉激活率依次达到峰值,在短暂维持后随前倾角度的快速减小而迅速下降。 由此表明在NHE 动作过程中,神经系统在控制肌肉群运动,并使肌肉群作为一个单位激活,该肌肉群作为控制运动的协同单位[4]。
3.3 屈膝肌群协作模式
腓肠肌内、外侧之间肌电变化曲线差距较大,腓肠肌(外侧头)肌电激活水平在释放角发生前后均显著高于内侧,同时腓肠肌(外侧头)的肌电激活水平显著高于其他肌肉。 腓肠肌作为远端双关节肌,它同时跨过膝关节与踝关节,通过对比平均肌电激活百分比我们可以发现, 腓肠肌较比目鱼肌在释放角前、后均表现出更高的激活水平,这可能是因为腓肠肌的双关节肌特性, 在动作过程中起到传输力量的作用, 腓肠肌在NHE 动作中通过离心收缩将附近单关节肌的力量传至膝关节,在控制躯体动态平衡的同时增强了膝关节的稳定性。而腘绳肌损伤往往发生于最大离心收缩时刻, 如奔跑时急速髋曲膝伸的动作是发生腘绳肌损伤的常见动作[23]。 除去腘绳肌力量不足外, 腘绳肌无法承受瞬间强大的离心力矩也是导致其拉伤的重要原因。 而根据我们的研究结果推测,腓肠肌与腘绳肌同为屈膝肌,在NHE 动作中起到配合腘绳肌对抗离心扭矩的作用。 另一方面通过增强腓肠肌离心力量或许能够减少腘绳肌在较大离心扭矩时的压力,从而降低腘绳肌拉伤的风险。在释放角出现后, 所有测试肌肉的肌电激活水平均呈现徐缓下降趋势。在释放角出现后10%区间内,下落角速度临近峰值时,所有测试肌肉肌电激活水平呈现急速下落趋势,并在前倾角度 30°~35°区间内依次失活。
3.4 比目鱼肌在NHE 动作过程中的作用
本研究新发现比目鱼肌在NHE 动作过程中同样具有明显的肌电激活特征,在以往的研究中对于比目鱼肌在NHE 动作中的功能作用未有确切表述,本研究认为,在NHE 动作中比目鱼肌通过积极收缩以稳定踝关节,起到固定远端支点的作用。 另一方面,比目鱼肌协同腓肠肌收缩以形成远端杠杆力臂,在向近端传递力量的同时对抗外部对踝关节施加的力矩[24]。 但比目鱼肌与腓肠肌在NHE 动作中的具体协同模式尚未厘清,在之后的研究中会着重检查此项。
4 结论
在北欧腘绳肌训练动作中, 小腿三头肌与腘绳肌肌电变化趋势相近,屈膝肌群在动作运动控制中存在一定协作关系。腓肠肌作为远端双关节肌, 在动作过程中能够向近端关节肌肉传递力量、分担内部力矩,配合腘绳肌稳定膝关节,增强运动中的平衡控制。
