基于改进ADRC的开关磁阻电机无位置传感器控制*
2022-12-21赵永生范云生
赵永生,刘 鹤,范云生,柳 健
(大连海事大学船舶电气工程学院,大连 116026)
0 引言
近年来,永磁同步电机广泛应用于工业应用中[1-2],但是制造工艺需要消耗稀土资源,考虑到稀土材料的高成本和有限的供应,开关磁阻电机(switched reluctance motor,SRM)以自身的双凸极结构同时配备高磁导率硅钢片脱颖而出,其在调速时可以频繁启动,最小限度的影响电机自身性能,其结构设计独特等优点,在实际应用中主要应用于新能源电动车,航空电机,起重机等场合[3-6]。通常SRM通过机械式转子位置传感器提供的位置信号,然后通过公式转换、编程计算得到转子位置信息。传统的位置传感器[7]不但使电机结构变得复杂,而且使系统的可靠性和环境适应性变低,维护困难,电机体积增加,成本增加,限制了SRM的适用范围。因此,为了减少位置传感器安装体积和应用环境的影响有多种无传感器方法[8-12]被提出来,代替系统中的位置传感器,利用多种估计方法对电机的转子位置进行估计。以上这些方法利用开关磁阻电机的三相绕组电流电压预测到的转子转速,位置角与实际编码器测量值存在一定的差值,将波动差值采用低通滤波器进行平滑处理,使得预测的转子速度大小趋于稳定值,波动减小,最后将处理的信号输入到使用PI控制器中,保证控制策略在整个调速系统正常运行;但是,采用传统的PI控制在抑制转矩脉动效果不明显,在开关磁阻电机无位置传感器控制系统初始导通时存在超调量大的问题。
针对PI控制缺陷,韩京清[13]提出自抗扰控制(active disturbance rejection control,ADRC)。同时ADRC在永磁同步电机无位置控制方面得到应用。滕青芳等[14]在永磁同步电机模型转矩预测控制系统中引用无位置传感器自抗扰控制,并且与传统PI控制下的转矩控制做出比较,实验结果表明改进后的无位置传感器模型预测转矩控制表现出良好的鲁棒性,抗干扰能力加强。文建平、曾岳南、孙凯等[15-17]将自抗扰控制应用到永磁同步电机速度环与电流环控制中,提高了电机d轴,q轴的电流跟踪效果与精度,通过描述函数改进电流非线性震荡控制性能,最终实现永磁同步电机无位置传感器转子位置估计。
本文提出一种开关磁阻电机滑模自抗扰控制(sliding mode active disturbance rejection control,SM_ADRC)方法,将该方法应用于开关磁阻电机简化磁链法无位置传感器调速系统中。具体体现为将滑模控制策略引入到ADRC调速系统中,对非线性控制率进行改进,代替PI调速控制模块。仿真结果表明,改进的方法能够加快开关磁阻电机无位置传感器调速系统的响应速度,同时兼顾滤波,减小超调的作用,该方法具有良好的控制性能。
1 SRM 数学模型
SRM的各相绕组上的电压平衡方程为:

(1)
式中,u为相绕组的母线电压;R为相绕组的电阻;i为相绕组电流;θ为角度位置;ψ为相绕组磁链。
由式(1)推导出磁链计算表达式为:
(2)
式中,ψ(0)为磁链初始值,取ψ(0)=0。
将式(2)离散化,公式如下:
(3)
式中,k为采样点个数;T为步长,即采样周期。
由于开关磁阻电机气隙随转子位置变化,电机磁链,转子位置,电流呈现二元非线性函数;为了准确描述电机特性,通常获取到实际电机磁链信息的方法有多种,例如有限元仿真通过输入电机各项设计参数构造电机模型得到数据,或者采用实际对电机堵转的方法获取样本数据信息;本文通过对电机进行堵转实验,测量电机的非线性特性;首先,使得开关磁阻电机的磁链测量磁链的值时需要先把电机的转子固定在电感最小的位置,导通该相位,电流达到峰值后延时几秒以后再关断,实时的记录绕组的电流与电压值,然后再将电机转到预先设定好的待测角度位置上,重复上述的过程,最后把测量得到的电压与电流值代入式(3)处理。
通过整理信息计算就可以得到磁链值。图1为实测的磁链特性关于电流变化的曲线。图2客观显示电流-角度-磁链三者的三维关系。

图1 堵转实验得到的样机磁链特性曲线 图2 开关磁阻电机电流-角度-磁链三维图
2 改进的ADRC控制器
2.1 传统的ADRC组成介绍
ADRC控制器在传统比例积分(PI)调速的基础上发展而来,ADRC的主要组成部分包括跟踪微分器(TD),非线性控制率(NLSEF),扩张观测器(ESO),扰动等四部分组成。TD微分跟踪器主要对输入的开关磁阻电机转子转速信号进行过度调节,使其输出平滑的转速信号,用于下阶段转速信号的比较;非线性控制率(NLSEF)用于接收开关磁阻电机转速给定信号,与扩张观测器对电机的估测信号的估测差值,通过设置控制规律得到控制信号u0;ESO(扩张观测器)的作用是对开关磁阻转速进行观测,得到开关磁阻电机速度控制系统不确定的部分(负载转矩)的估计值。扰动补偿部分根据计算的开关磁阻电机对负载转矩及外部干扰量不确定部分的估计值来对开关磁阻电机调速系统的非线性控制器输出量u0进行补偿,补偿后的效果在抑制扰动方面更加明显,系统鲁棒性加强。

图3 传统ADRC调速系统组成框图
(1)TD微分器介绍
(4)
式中,ω*为开关磁阻系统运行给定的参考转速;ω1为开关磁阻电机调速系统过程中安排过渡的给定转速值;β0为速度跟踪因子,其取值利用试凑法得到;α0为非线性因子,一般取值在0.5左右;δ0取值一般在0.01~0.1左右。
(2)NLSEF非线性控制器介绍
(5)
(6)
在非线性控制率中:ω1为来自微分控制器的输出转速信号;z21为扩张观测器对转子转速的预测估计信号,此时信号相当于利用滤波模块进行滤波后的信号,处理后的信号稳定,波动小,抗干扰能力加强;δ为在开关磁阻电机控制中的滤波因子。
(3)ESO扩张观测器介绍
(7)
式中,ω为转子角速度的实际值,实际值是根据开关磁阻电机无位置传感器时,根据磁链信息对转子转速进行估测,代替传感器信息直接进行测量得到的转子转速;z21为在扩张观测器开关磁阻电机角速度的估计值;z22为对扰动量的估计;β2、β3、α2、α3、δ2、δ3为可调参数,通常情况下α0的取值范围在[0,1]内,δ0取值范围在[0.01,0.1]区间内。
2.2 改进的滑模ADRC介绍
为了减少开关磁阻电机实际工程实践中试验值,提高开关磁阻电机调速控制系统的鲁棒性,在PI速度控制器改进为ADRC速度控制器的基础上,将ADRC控制器中的非线性控制率引入滑模控制(slide mode control,SMC),用于对开关磁阻电机调速系统的速度,电流,磁链等参数的整定效果,更好地控制输出电机的速度与转子位置角。考虑开关磁阻电机无位置传感器调速过程输入输出变量的单调性,将滑模控制引入到开关磁阻电机调速系统中的速度控制器中,具体设计如图4所示。

图4 改进滑模速度控制器系统框图
针对开关磁阻电机无位置传感器调速系统实际应用过程的实用性,引入积分滑模理论与ADRC控制相结合,由于滑模面加入积分项,整个开关磁阻电机运行系统的转子转速与转子位置稳态误差比例减小,抖振波动减小。其中积分滑模面s表达式如下:

(8)
式中,c为引入的开关磁阻电机调速模块积分项系数,c>0。为了保证转速跟踪性能,将SRM转速误差作为改进速度控制器的输入量,通过对变量进行积分滑模设计,使得滑模面趋于稳定,具体设计的开关磁阻电机非线性速度控制器公式如下:

(9)
式中,ω*为给定的开关磁阻电机期望转速;ω为根据开关磁阻电机磁链信息估计滤波后的转速;x1为转速误差;x2为对应的滑模自抗扰控制器的非线性控制率输入。具体的滑模公式转换如公式(10)所示。

(10)
滑模趋近率的选择:

(11)

u0=-(ceω+ks+εsgn(s))
(12)
2.3 稳定性证明分析

(13)
式中,ε,k为可调增益参数,且均大于0,在选取合适的值情况下,改进后的非线性滑模控制器能够趋于稳定,最终改进后的非线性控制器为:
(14)
3 无位置传感器控制方法
3.1 简化磁链法分析
在上述速度控制器优化完毕后,将优化的速度控制器模块与开关磁阻电机无位置传感器控制系统相结合,其中,开关磁阻电机无位置控制方法采用简化磁链法进行转子位置角度的预测,将预测的信号经过滤波后应用于调速系统中。该方法还需要准确确定关断角位置及关断角处的磁链信息,最终实现整个系统的正常运行。通过实时判断电机是否到达设定的关断角位置,根据电机磁链,电流初始终止位置对比图分析。在实际运行过程中无法绝对的取值到磁链相等,需要设置一定阈值区间值σ,且σ取值为0.01;实时的磁链通过式(2)进行计算,优化磁链模型通过上述建模获取。图5描述了电机确定关断角位置的逻辑框图。

图5 简化磁链法在关断角处的换相信号图
3.2 转速与角度估计
根据上述方法获取到开关磁阻电机在关断角处的换相脉冲信号,在换相信号基础上,需要对脉冲间隔内的对应的开关磁阻电机估测位置的差值进行计算,在一个完整的导通区间内对应3次换相,每个完整的导通区间对应的转子机械角度为45°,具体的计算公式为:
(15)
式中,m为开关磁阻电机相数;Nr为转子极数。
在获取到开关磁阻电机相邻关断角之间的转子位置角差值后,通过编程计算在此间隔角度内的步长个数,进而计算出间隔时间ΔT,最后通过间隔转子角度差值与间隔时间的比值计算出转子转速,将转子转速作为SRD系统的反馈转速,实现系统的正常运行。
(16)
在实际搭建仿真应用中,电压与电流收到外界干扰会产生波动,并造成测量误差,为了解决干扰对预测转子转速造成的不必要干扰,需要对仿真及实验输出曲线进行滤波处理,保证整个简化磁链法闭环系统的稳定运行。转子的任意位置可由式(17)估算:
(17)
转子每转到一次关断角的位置,通过预先设定的值进行判断,判断符合就会确定一次正确的转子位置,相当于及时复位信号判断,避免多次积分带来的转子累计误差。
4 仿真验证
为了验证上述方法的可行性和稳定性,基于MATLAB/Simulink搭建的PI控制器与改进的滑模自抗扰控制器应用于上述无位置传感器转子位置控制策略中。改进后的开关磁阻电机无位置传感器控制系统框图如图6所示,为了更好控制开关磁阻电机运行,需要对样机参数进行了解,具体参数如表1所示。

图6 12/8三相SRM无位置传感器的速度控制系统框图

表1 开关磁阻电机样机数据表
在开关磁阻电机给定转速600 r/min,负载转矩0.5 N·m时,如图7所示。通过传统PI与ADRC、滑模ADRC三者对比结果发现,本文的方法能够平稳,快速的跟踪到预先设定的给定转速,鲁棒性增强,超调减小。
开关磁阻电机在0.5 s时,开关磁阻电机无位置传感器调速系统由600 r/min变化为800 r/min,传统PI与ADRC、滑模ADRC三者对应的转子转速变化对比图如图8所示,通过观察发现,3种控制方式均能够跟踪到给定的转子转速,且改进后的控制策略启动过程快,超调量小,动态性能良好。

图7 给定转速控制策略下三者对比图 图8 变转速前后策略对比图
首先,在开关磁阻电机调速系统正常启动运行时,给定开关磁阻电机运行速度为600 r/min,负载转矩0.5 N·m将通过简化磁链法得到的预测转子转速应用于整个调速系统中,然后通过实际转速与滤波后的估计转速进行对比,最后将两者控制调速策略中对应的转子位置角进行对比分析,转子位置估计角度与实际角度的差值可以直观的观察到控制策略的效果,具体如图9和图10所示。

(a) 传统PI调速系统转子预测转速与实际转速 (b) 传统PI调速系统转子预测位置与实际位置

(c) 传统PI调速系统对应的转子位置与实际位置差值

(a) SM-ADRC调速系统对应的转子估计与实际转速 (b) SM-ADRC调速系统对应的转子估计位置与实际位置
(c) SM-ADRC调速系统对应的转子位置与实际位置差值
可以看出,新的控制策略不仅在开关磁阻电机调速控制策略具有良好的控制性能,而且在开关磁阻电机转子预测与实际转速的误差减小,波动减小,精度有所提高。
图11和图12描述开关磁阻电机无位置传感器控制系统在1 s时,转速600 r/min时,负载转矩从1 N·m变化为4 N·m变化的曲线,从图中可以观察到利用传统PI控制的调速系统在变转矩时转矩波动较大,变化不平稳,电流受到估计转速滤波影响较大,改进后的控制策略在负载转矩变化时更加顺畅、平滑、抗扰动能力加强。

(a) 变转矩时,传统PI控制策略下电流 (b) 变转矩时,传统PI控制策略下负载转矩变化

(c) 变转速时,传统PI控制策略下转子转速变化

(a) 变转矩时,改进ADRC控制策略下电流 (b) 变转矩时,改进ADRC控制策略下负载转矩变化

(c) 变转矩时,改进ADRC控制策略下转矩变化
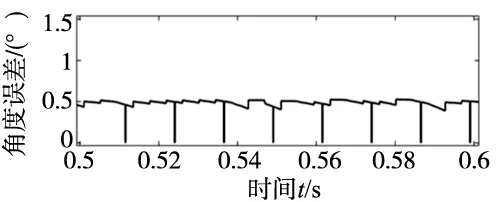
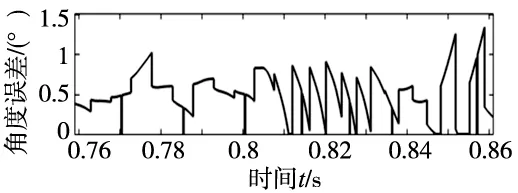
图13和图14描述开关磁阻电机无位置传感器控制系统在0.8 s时,负载转矩为2 N·m,转子转速由500 r/min变化为700 r/min曲线对比图,其中包括转子的估计转速与实际转速对比效果,转子估计位置与实际位置及其差值。通过观察发现,改进后的开关磁阻电机转子位置角预测误差与实际误差减小,波动比例缩小。

(a) 变转速时,传统PI控制策略下转子转速变化 (b) 变转速时,传统PI控制策略下转子位置变化
(c) 变转速时,传统PI控制策略下转子估计误差图

(a) 变转速时,改进ADRC控制策略下转子估计误差图 (b) 变转速时,改进ADRC控制策略下转子估计误差图

(c) 变转速时,改进ADRC控制策略下转子估计误差图
5 结论
为了解决传统PI速度控制器中的超调量大以及动态响应速度缓慢等问题,本文将滑模与自抗扰原理理论引入开关磁阻电机无位置传感器控制系统速度环,取代传统的PI速度控制器,通过PI、SM-ADRC进行比较,通过仿真观测最终得出结论如下:
(1)开关磁阻电机无位置传感器系统转速环采用滑模自抗扰控制算法时,速度的动态响应速度更快,超调量更小。
(2)能够实现PI与滤波共同作用,输出的电流信号更加稳定,根据开关磁阻电机的绕组电流,电压,关断角处磁链组成的开关磁阻电机无位置传感器控制系统对转子位置预测精度提高,预测误差波动更小,提高系统的扰动性能,具有良好的控制性能。
