锚护一体的支护网变幅机构设计及仿真分析①
2022-12-15牛天宇陈清华
牛天宇, 陈清华,b, 江 波
(安徽理工大学a.机械工程学院,b.环境友好材料与职业健康研究院,安徽 芜湖 241003;c.皖北煤电集团朱集西煤矿,安徽 淮南 232082)
0 引 言
我国煤矿大部分是井工煤矿,每年的巷道掘进、支护总长可达到千万米,巷道支护作业对煤炭安全开采就具有十分重要意义[1-5]。成本低、支护效果好、使用简便等优点是锚杆支护能够被广泛应用于煤矿巷道支护领域的重要原因,所以对支护网变幅机构的研究具有重要意义[6-10]。可以用计算机虚拟技术,先利用SolidWorks进行三维建模,然后运用Matlab仿真软件的fmincon工具箱进行求解;最后用ADAMS仿真软件进行变幅机构的动力学仿真,能够详细的得到支护网变幅机构工作时的每个部件的受力情况,得到受力曲线图。
1 模型建立
1.1 支护网变幅机构的Solidworks建模
图1是支护网三维模型结构,该结构由套筒1、套筒2、HSG-80-50-1200液压缸、脚座、销轴、顶板支座、顶板和顶板盖板等组成。
支护网变幅机构的工作流程如下:首先是顶板盖板在顶板上打开,然后是HSG-80-50-1200液压缸伸长,将顶板送至工作面,固定工作面的支撑架,进行支护打锚工作。
1.2 支护网变幅机构的运动和受力分析
支护网变幅机构主要有套筒、液压缸和机构顶架组成,机构简图如下图2所示。支护网变幅机构上有3个铰点:液压缸与套筒通过脚座连接的铰点B,液压缸与顶板通过脚座连接的铰点D,顶板与套筒通过顶板支座连接的铰点C。脚座与套筒1的连接点为A,C点到BD线段的距离为Lh,C点与BD的延长线交于E点,CD的长度为e,AC的长度为d,AB的长为f,BD与BC的夹角为α,CD与CB的夹角β,过C点的竖直线与D点的水平线两线相交于点F。DF的长为a,CF的长为b。
(1)变幅机构基本的运动参数之间关系
在图2中,由三角形正弦定理得:
(1)
(2)
在△BCD中,由余弦定理可得:
BD2=BC2+CD2-2BC*CD*cosβ
(3)
可知液压缸的长度为:
(4)
又由
(5)
在△EBC中:
(6)
可得出液压缸力臂长度Lh为:
(7)

图1 支护网变幅机构结构图
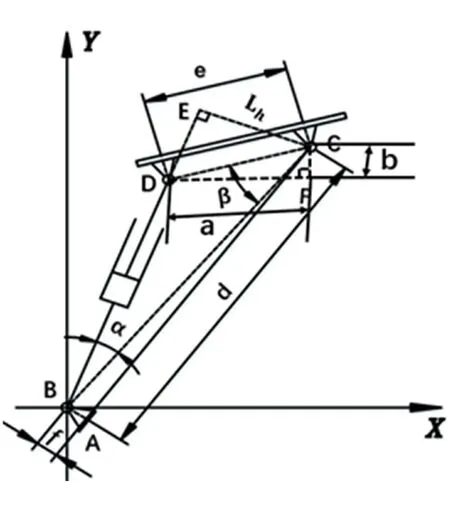
图2 支护网变幅机构结构简图
(2)受力分析
因为铰点的力矩平衡,所以对B点进行取矩,可以得出液压缸的推力为:
(8)
式中:F为液压缸的推力;W为吊臂工作状态下的最大起重量;G为吊臂的自身重量。
由公式(8)可以看出,AB之间的长度为是固定不变的,支护网变幅机构的最大承载量W固定不变后,液压缸的推力是β与Lh的函数。也就是铰点B、铰点C和铰点D的位置决定了,液压缸所承受力的大小。
2 模型的优化
2.1 选择设计变量
设计变量是经过优选和多次调整,最后才可以确定的一个或者几个设计参数。在支护网变幅机构中,对机构的性能影响最大的是铰点B、铰点C和铰点D的位置关系。假设以铰点B为参考点,令DF=x1,CF=x2,AC=x3引入3个设计变量,表达式为:
X=[abc]T=[x1x2x3]T
(9)
2.2 建立目标函数
上述建立数学模型和支护网变幅机构的设计需要,可以从液压缸的推力最小为优化的目标函数,公式如下:
F(x)=minF(x1,x2,x3)
(10)
2.3 建立约束函数
约束条件是在一个可行设计当中设计的变量必须达到的限制条件。支护网变幅机构的约束条件主要有边界约束条件、几何约束条件、支护网变幅机构的稳定性约束条件。
(1)支护网变幅机构边界约束条件
以铰点B为初始位置,设置初始长度,测量a=275mm,b=124mm,d=1945mm,对支护网的变幅机构给出限制范围:
(11)
(2)支护网变幅机构的几何约束
由于支护网变幅机构中3个铰点可以组成△BCD,又因三角形两边之和大于第三边,可得出支护网变幅机构的几何约束条件。
BD+CD-BC>0
(12)
BD+BC-CD>0
(13)
BC+CD-BD>0
(14)
(3)支护网变幅机构的稳定性约束条件
因为液压缸在工作时稳定性很重要,所以需要限制液压缸的伸缩量比,来保证变幅机构液压缸的稳定性。
λ=Lmax/Lmin
(15)
λ的范围为 1.68≤λ≤1.85。
2.4 MATLAB的优化求解
MATLAB仿真软件的工具箱里面有很多优化算法的函数。该支护网变幅机构从数学模型上看,能够用非线性的约束优化函数fmincon,去解决多变量非线性的有约束优化问题。进行编写程序,然后调试运行求解,求解结果如下表1所示。

表1 优化前后铰点位置参数(mm)
3 幅机构ADAMS仿真分析
3.1 各部件约束副添加及驱动函数的选择
先在Solidworks三维建模中建模,在导入ADAMS仿真软件中,支护网变幅机构在ADAMS中模型如下图3所示。
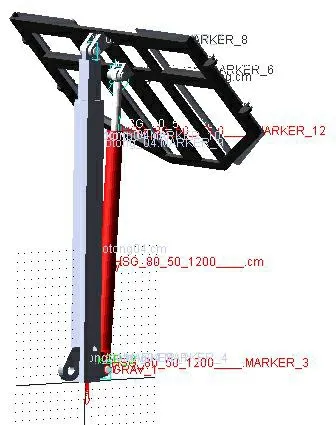
图3 支护网变幅机构仿真模型
由支护网变幅机构在实际情况下工作情况,变幅机构液压缸工作伸长量为最大时,顶板完全展开,仰角为90°,总共时长定为5s,对支护网变幅机构个部件添加各种连接约束和驱动副,如下表2所示。
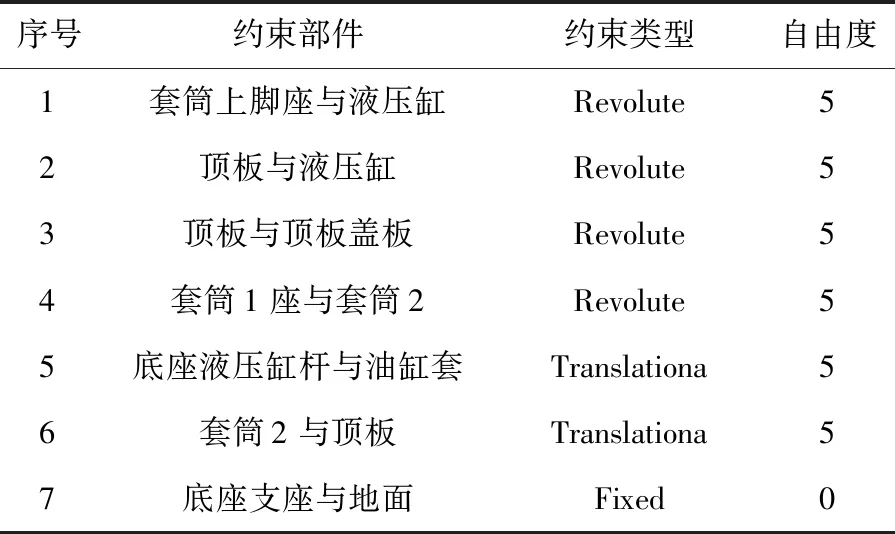
表2 各个部件连接约束类型
3.2 仿真结果和分析
(1)仿真结果
首先设置终止时间为5s,步数为20步。对支护网变幅机构进行仿真分析,在变幅机构液压缸上建立移动副,在移动副上设置驱动函数。进行运动学仿真,测量变幅机构液压缸随时间所受力的大小。如下图4所示,在2s时刻压力为1080.75N,此时变幅机构液压缸在整个仿真分析中受力最小,在4.75s时刻压力为2100.78N,此时变幅机构液压缸在整个仿真分析中受力最大。
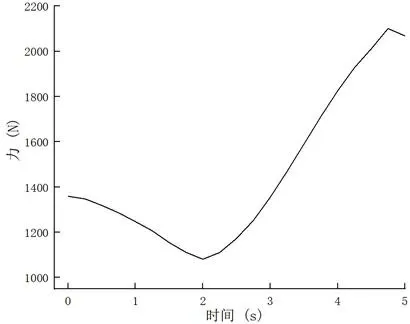
图4 变幅机构液压缸随时间受力图
(2)优化结果对比分析
在Matlab仿真软件中输入3个初始设计变量,进行编写程序,然后调试运行求解,求解结果,最后得出三个设计变量的最优解。根据得到的最优解,在solidworks中调整支护网变幅机构的三个铰点的位置。导入ADAMS中进行运动学仿真,得到支护网变幅机构液压缸优化前后受力情况,如下图5和表3所示。
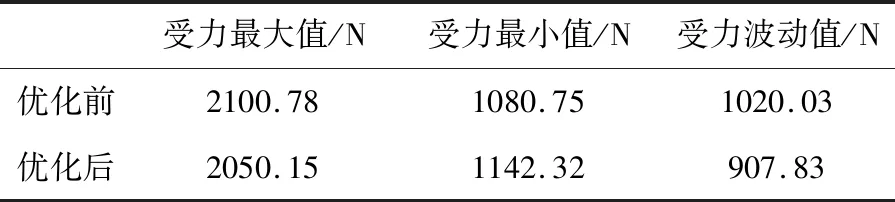
表3 变幅机构优化前后受力数据对比(N)
经过优化,支护网变幅机构液压缸的最大受力从2100.78N下降到2050.15N,下降了5.34%,而且变幅机构液压缸受力波动值从1020.03N下降到907.83N,液压系统压力差变小,增加了变幅机构的稳定性,达到了预期优化目标。

图5 优化前后变幅机构液压缸受力对比图
4 结 论
(1)支护网变幅机构是有液压缸推动顶板,并且带动套筒一起运动,直到顶板达到工作面平台进行支护作业,同时也为下一步打锚作业做好准备。
(2)运用SolidWorks,ADAMS和Matlab联合对所建立支护网变幅机构模型进行了最优化求解和动力学仿真分析,验证了所设计支护网变幅机构的正确性;
