基于模型试验的海洋核动力平台定位系统解脱作业关键指标分析
2022-12-15郭冲冲武文华程丛志吴国东曹光明吕柏呈罗起航
郭冲冲,武文华, 2, 3,程丛志,吴国东,曹光明,吕柏呈,罗起航
(1. 大连理工大学 工业装备与结构分析国家重点实验室,辽宁 大连 116024; 2. 大连理工大学 宁波研究院,浙江 宁波 315000; 3. 大连理工大学 深圳研究院,广东 深圳 518057; 4. 武汉第二船舶设计研究所,湖北 武汉 430064; 5. 中国海洋石油有限公司研究总院,北京 100010)
海洋核动力平台(marine nuclear power platform,简称MNPP)是一种海上浮动式核电站,将船舶工程与小型核反应堆有机结合(见图1),可对外持续提供电力、淡水等能源保障。海洋核动力平台(后简称平台)具有机动性能好、一次装料运行周期长、功率密度大、运行成本低、节能环保等优点,具有广阔的市场应用前景[1-4]。由于平台自身并没有航行动力系统,需要依靠定位系统实现海上长期作业。在复杂海洋环境长期作用下,平台会进行维修、修护等回坞改造,或根据作业海域的能源配置需求更换作业地点[5],因此定位系统常规解脱作业是确保平台长期生产作业的要素。定位系统常规解脱作业作为核动力平台的一种典型作业方式,属于综合性的海洋工程问题,具有难度、风险高的特点。无论是针对平台的应急处理还是完整性管理,对解脱作业过程的研究都具有重要的工程价值。

图1 海洋核动力平台Fig. 1 Marine nuclear power platform
国内海洋工程领域尚没有浮式核动力平台的工程应用案例,对于解脱作业安全性的研究主要针对于海上浮式储卸油装置(floating production storage and offloading,简称FPSO)等海洋油气开发平台。目前,海洋石油工程股份有限公司、中海石油(中国)有限公司天津分公司等已多次成功实现了渤海海域FPSO系泊系统的解脱作业。“海洋石油112”FPSO于2014年实现了世界首例水下软刚臂单点系泊系统的解脱[6]。宫学成和秦勇[7]结合“渤海长青号”FPSO解脱工程项目,从现场调研、施工设计等方面介绍了水上软刚臂系泊系统的解脱过程。田冰等[8]进一步总结了“渤海长青号”FPSO海上解脱作业的成功经验,并介绍了相关的施工技术和施工方法,为工程管理和技术人员研究FPSO解脱/相关工程提供参考。刘雪宜[9]从水上软刚臂单点组成、YOKE损坏情况、FPSO限位与浮吊就位、软管解脱、FPSO解脱拖航、YOKE拆除等方面,介绍“海洋石油102”FPSO在YOKE损坏时的应急解脱作业过程。刘斌[10]阐述了软刚臂系泊系统在解脱方案制定时应遵循的原则,并为非常规应急解脱提供了几种方案模型,通过适应性分析为特殊情况下解脱作业提供参考。刘雪宜等[11]以“渤海友谊号”FPSO为例,论述了解脱作业的方案设计、施工准备以及海上施工流程,同时针对冬季作业窗口的选择以及通航安全评估进行了介绍。孙丕松等[12]针对孤立塔柱式单点系泊系统的特点,通过准备工作和解脱流程对该类系泊系统的解脱作业进行了研究。吕子鹏[13]介绍了泰国湾FPSO的服役情况,并讨论了其海上解脱、拆除及拖航方法。
以上研究主要以海洋平台FPSO的解脱工程项目为背景,从项目施工、作业设计、作业流程和作业管理等方面进行介绍论述。同时国内外关于浅水软刚臂式单点系统解脱作业指标的研究较少,但有一些学者针对深水内转塔式单点系泊解脱作业中的设计分析方案和关键因素进行了研究,对于核动力平台解脱作业具有一定借鉴意义。如Luo和Wang[14]提出了深水油田开发中可解脱式FPSO的概念,重点介绍了解脱式FPSO的关键技术和工程分析,同时对永久式FPSO和可解脱式FPSO的优缺点进行了评估。刘亮等[15]介绍了可解脱式FPSO的解脱方式及解脱系统,针对解脱过程进行时域模拟及相关因素的敏感性分析,结合计算得到的关键因素进行了浮子的优化设计。桂龙等[16]以浅水单点系泊装置水下定位系统维修解脱为背景,计算了在拖轮限位状态下FPSO的运动与限位缆绳张力。
可以看出,虽然国内已经实施了多次FPSO的解脱、拖航作业,形成了较为完整的施工方案。但是,海洋核动力平台定位系统的解脱作业是否可行尚待验证。同时解脱作业各阶段潜在风险的研究还十分有限,解脱环节中关键力学指标仍偏重于指挥人员的工程经验,对于完整解脱过程关键力学指标的量化仍需深入研究。由于解脱过程具有复杂、分阶段及非线性的特点,属于综合性的作业问题,理论和数值方法均存在一定局限性,无法模拟作业阶段的转变情况。而模型试验能预测尚未建造出来的核动力平台定位系统的性能,探索其解脱过程的关键指标,同时通过严格控制定位系统的主要参数而不受外界条件和自然条件的限制,进而更加有效地反映真实定位系统的解脱过程。
本文梳理了海洋核动力平台解脱作业流程,建立了解脱作业故障树模型,基于故障事件风险传递路径提出了定位系统解脱作业关键指标;采用1∶9缩尺比模型试验方法对解脱作业流程进行模拟,验证了海洋核动力平台解脱作业的可行性;结合试验模拟结果,对解脱作业关键指标,包括提升缆绳在限位状态与解脱作业时的张力响应、法兰解脱时系泊腿下部万向节振动响应、系泊刚臂下放姿态等进行了分析,研究结果为定位系统解脱作业的设计与分析提供依据,对于核动力平台未来的解脱作业具有重要的参考价值。
1 解脱作业流程及关键风险指标分析
我国海洋核动力平台采用船型浮体方案[17],由水上软刚臂单点系泊系统(soft yoke single point mooring system,简称SYMS)实现平台的系泊定位。海洋核动力平台定位系统的结构主要包括:系泊支架、左右系泊腿、系泊刚臂(YOKE)、单点转塔以及船体支撑结构,如图2所示。

图2 定位系统结构形式Fig. 2 Structure of positioning system
定位系统的海上解脱作业具有工程量大、流程复杂、施工周期长、技术要求高等特点。借鉴国内海洋石油平台解脱作业的成功案例,并在此基础上开展解脱作业流程优化和规范化分析,在满足解脱作业窗口条件下,给出核动力平台定位系统解脱作业的流程为:1) 在左、右系泊腿上下滑轮之间穿挂提升缆;2)在船艏与YOKE接头之间预布主系泊缆;3)在船艏与YOKE左、右刚臂之间预布交叉缆,如图3(a)所示;4)艉部拖轮就位,见图3(b);5)YOKE压载舱压载液排放,见图3(c);6)提升缆收紧,拆除YOKE与系泊腿连接法兰的螺栓;7)释放提升缆,核动力平台后退,如图3(d),3(e)所示;8)解除所有工作缆绳,核动力平台在艉部拖轮的拖带下离开现场,见图3(f)。

图3 核动力平台解脱作业流程示意Fig. 3 Schematic flow of MNPP disconnection operation
定位系统解脱作业中的主系泊缆、交叉缆以及船艉拖轮主要起到平台限位作用。收紧各缆绳至一定的张力,可以保持平台定位;与此同时,主系泊缆、交叉缆可以替代定位系统起到临时系泊功能,保证整个解脱过程的定位安全。提升缆是解脱作业的关键,通过提升YOKE使系泊腿处于松弛状态,同时系泊腿下部万向铰接头处的法兰螺栓不再受力,YOKE的重力全部转移至提升缆绳上。拆除法兰螺栓后,基本实现了定位系统的物理解脱,同步释放所有缆绳下放YOKE完成定位系统解脱。基于上述解脱流程梳理可知,定位系统解脱作业中关键阶段可以划分为:缆绳拴挂准备、提升缆预紧、拆除法兰螺栓、释放提升缆下放YOKE、解脱完成。整体的作业流程见图4。

图4 定位系统解脱作业流程Fig. 4 MNPP disconnect operation flow chart
由于定位系统解脱作业工程量大、作业设备较多以及作业环境复杂,通过解脱作业流程分析并结合作业案例调查、专家走访,建立了解脱作业故障树,如图5所示,其中编码及对应故障事件见表1。基于解脱作业故障树的风险传递路径可以看出,解脱作业各阶段缆绳的受力状态、法兰脱离的振动响应和YOKE的姿态变化等都是关键风险作业指标,直接关系到解脱作业的安全。基于工程经验的传统解脱方法往往缺乏对这些指标的关注,尤其是针对于提升缆绳失效造成解脱失败的危害考虑不足。

图5 定位系统解脱作业故障树Fig. 5 MNPP disconnect operation fault tree

表1 定位系统解脱作业故障事件Tab. 1 Fault events of MNPP disconnection operation
2 定位系统解脱作业模型试验
2.1 试验设施
利用MG6-12EP六自由度电动运动平台开展定位系统解脱试验。电动六自由度运动系统主要由电动缸、上平台、控制柜、气悬浮系统和外部接口等部分组成,如图6(a)所示。运动平台(见图6(b))的功能是支撑负载和驱动负载运动,包括上平台、6个电动缸、3个悬浮气弹簧、地基以及上下铰链。上平台根据负载安装要求预留机械接口;6个电动缸通过协同改变活塞杆伸出长度控制上平台的空间位置和姿态;气悬浮系统的活塞杆随着上平台的运动作被动运动并输出向上的抬升力。整体运动系统中位高度为3 607 mm,设计荷载不小于120 kN,可用于模拟船舶在航行中因操纵、装载不平衡和风浪等原因引起的纵向、横向摇摆的工况。

图6 六自由度电动平台Fig. 6 6-DOF electric stewart platform
2.2 相似准则
海洋工程结构物模型试验中,原型和模型两者之间应满足的相似条件包括几何相似、运动相似和动力相似[18]。一般而言,开展以研究海洋结构物在风、浪、流下的运动和受力为目的的模型试验,应遵循Froude 相似和Strouhal相似准则,即重力相似和惯性力相似[19]。定位系统的解脱模型试验也不例外,并且本试验研究目的在于探索解脱作业过程中的关键指标变化,重点关注系泊结构的运动与动力特性,这就意味着重力和惯性力的作用占主导地位。所以,试验中各项物理参数的设定遵循Froude和Strouhal相似准则进行:

(1)

(2)
其中,V是速度,L是特征线尺度,T是周期,下标m和s分别代表模型和原型。λ是模型和原型间的线性缩尺比,综合考虑运动平台尺度和加载能力,确定本次试验缩尺比λ=1/9,试验模型主要尺寸如表2所示。

表2 定位系统的主要几何参数Tab. 2 Geometric parameters of MNPP单位:m
继而根据几何缩尺比λ和选定的相似准则,进一步确定其他物理参数详细的相似比尺关系(见表3),从而对相关试验参数及测试结果进行缩尺或还原。

表3 实体与模型各物理量的转换关系Tab. 3 Physical quantities of transformation relationship between prototype and model
2.3 试验模型与流程
试验模型通过部分相似策略对定位系统进行缩尺,利用六自由度平台模拟核动力平台船体运动的方式,属于半物理仿真分析试验方向。一些学者利用该试验平台,开展了多种结果的测试分析。如进行软刚臂系泊系统关键结构的损伤识别研究[20];开展软刚臂系泊系统横向减振设计[21];设计了用于室内模型试验的中大比尺托管架模型试验样机,利用运动平台模拟铺管船运动[22];采用该试验平台进行大型储液舱的液体晃荡研究,实现规则和不规则的六自由度运动激励[23];同时,在航空航天领域六自由度运动平台也具有广泛的应用,如利用自由度运动平台进行飞行器模拟,从而推动飞行器设计和飞行员训练[24]。上述研究表明了利用六自由度电动运动平台来模拟船体运动具有合理性与准确性。文中定位系统采用1∶9的大比尺模型结构(见图7),通过改变压载块位置和调节压载水舱的配重,从而调整YOKE模型的重心位置、纵摇和横摇惯性半径,以满足相似要求。在解脱模拟试验系统中,YOKE左右刚臂以及铰接头处焊接带缆孔,安装固定左右交叉缆和主系泊缆;左、右系泊腿下部安装螺栓法兰和滑轮组;系泊支架平台处安装左右舷绞车与主绞车,实现提升缆和主系泊缆的牵引功能。图8给出按照定位系统解脱试验流程的穿挂提升缆、安装主系泊缆、安装交叉缆的环节照片。

图7 定位系统模型实物照片Fig. 7 Model physical diagram of MNPP

图8 定位系统解脱试验模拟Fig. 8 MNPP experimental simulation
2.4 数据测试系统
基于关键风险作业指标建立了一套解脱模拟的测量系统,对解脱过程中的作业指标实时采集。传感器类型及作业指标测量见表4。试验平台测量系统的传感器布局见图9。

表4 测量系统传感器类型及作业指标Tab. 4 Sensor type and key performance indicators of measurement system

图9 解脱试验传感器测量系统Fig. 9 MNPP experimental sensor measurement system
3 定位系统解脱作业关键指标分析
3.1 各阶段关键指标
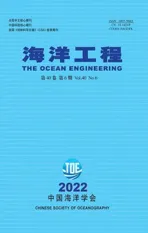
在YOKE下放阶段,由于主系泊缆与交叉缆的限位作用,YOKE刚臂绕单点头部做纵摇运动。图10~12是解脱作业过程YOKE下放角度、YOKE—船体距离和YOKE自身姿态运动状态的变化情况。由图10可知,在解脱作业前YOKE的初始姿态约为17.5°,解脱完成时YOKE的最终姿态24.2°,即YOKE由连接状态到脱离状态的变化。由图11可知,从解脱作业开始到结束过程,YOKE—船体距离由初始的250.1 mm增大到640.6 mm。YOKE下放角度与YOKE—船体距离的变化可以准确表征当前的作业阶段。由图12可知,YOKE下放从293.3 s处开始,下放作业持续时间110.9 s,YOKE的下放速率稳定在0.0617°/s,YOKE—船体距离的变化速率为3.7 mm/s。可以发现,YOKE解脱下放速率变化关系着作业安全与作业效率,基于试验模拟分析的量化指标能够为实际作业提供参考,避免过度依靠工程经验。
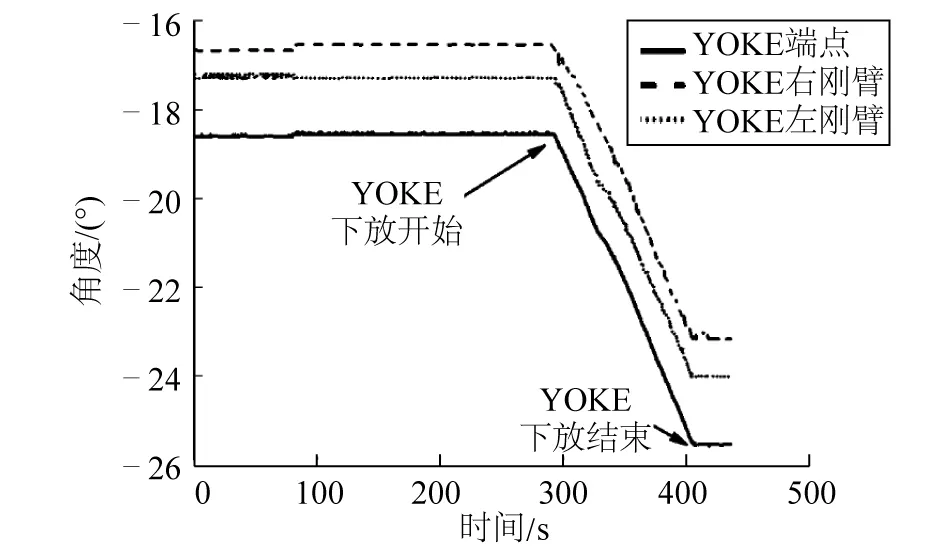
图10 YOKE下放角度时程曲线Fig. 10 Time-history diagram of YOKE angle

图11 YOKE—船体距离时程曲线Fig. 11 YOKE-ship displacement time-history diagram

图12 YOKE姿态变化Fig. 12 YOKE attitude variation
基于解脱作业流程可知,在预紧提升缆的作业阶段,YOKE姿态虽然没有发生变化,但定位系统的受力状态已发生调整。通过提升缆8绳复滑轮组的穿挂设计,锚机绞车的缆绳张力只需承担被拴挂结构重力的1/8。从图13缆绳张力的变化情况,可以完整反映定位系统解脱作业的各个阶段。由图13可知,在0~76.5 s,解脱作业处于准备阶段,提升缆绳保持松弛状态,张力情况基本为0;在76.5 s时刻,左右舷锚机绞车开始收紧提升缆,在4.3 s内提升缆绳张力增大到477 N;与此同时,由图14可知系泊腿的轴力在对应时刻由3 581 N变化为-148.5 N,受力状态由拉变压,YOKE的重力完全由系泊腿转移到提升缆绳上,依靠提升缆、交叉缆以及主系泊缆的临时系泊系统已经完全替代定位系统的海上定位功能。
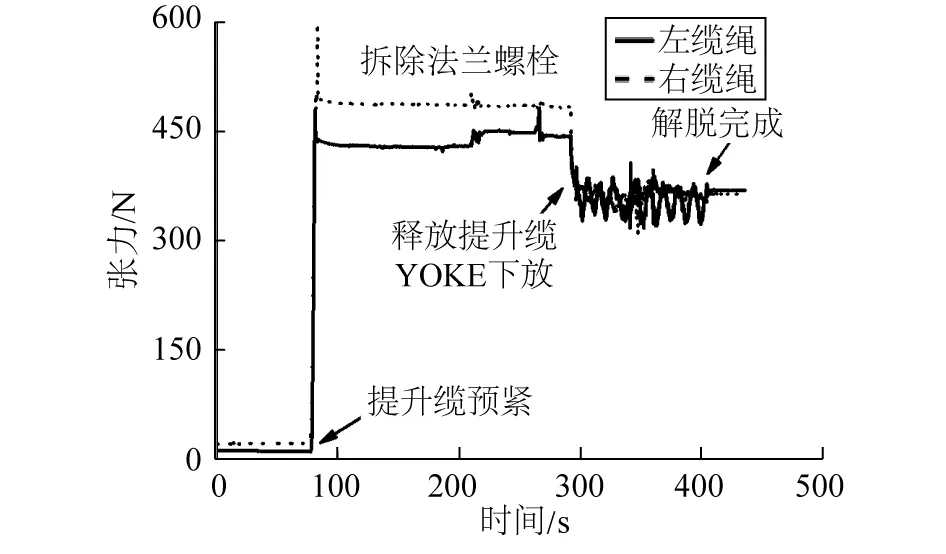
图13 提升缆绳张力变化Fig. 13 Lifting cable tension time-history diagram

图14 系泊腿轴力变化Fig. 14 Mooring leg force time-history diagram
当提升缆绳完成定位系统的限位作业后,进行法兰螺栓的拆除作业,从图13~14中标注可见。在实际工程中螺栓拆除顺序满足对称拆卸的要求,并结合YOKE压载液的排放同步进行。在292.4 s时,所有螺栓拆除完毕,释放提升缆绳下放YOKE,系泊腿与YOKE分离处于不受力状态,从图14可知,系泊腿轴力由-148.5 N变为0。在293.3~404.2 s的YOKE下放阶段,由于左右舷锚机绞车转动作业,提升缆绳张力存在周期性的波动,变化幅值约为58.4 N,波动周期约为10.3 s,由于缆绳松动造成的张力峰值达到407.1 N。考虑到提升缆在交变荷载作用下的安全状态,绞车转动速率的选取需要进一步关注。图15可以更直观呈现提升缆绳张力与系泊腿轴力的对应节点变化情况。

图15 提升缆绳拉力与系泊腿受力对比Fig. 15 Comparison diagram of lifting cable and mooring leg
图16给出了解脱作业过程中法兰螺栓处加速度的曲线。注意到在292.4 s螺栓拆除完毕时,法兰螺栓处的加速度值仍然基本为0;而在341.6 s,法兰螺栓处的加速度突变到9.1g。这是由于螺栓拆除完毕,下部万向节由于法兰盘之间距离太小无法转动,在提升缆绳释放到一定距离之后,法兰盘可完全分离不受约束,下部万向节在YOKE处于倾斜状态由于自身重力而发生转动,造成法兰盘撞击YOKE刚臂现象。因此,由法兰加速度响应分析表明,在法兰螺栓拆除完毕后,作业人员应及时远离下部万向节的转动半径,避免撞击砸伤带来的人员作业风险。

图16 法兰连接处加速度响应时程Fig. 16 Flange acceleration time-history diagram
3.2 各阶段关键指标
为了进一步研究平台运动对于解脱作业的影响,利用六自由度电动运动平台模拟船体的运动情况,进而分析定位系统解脱的动态作业指标。考虑到真实作业环境下拖轮及缆绳对平台的限位作用,试验模拟中对六自由度电动运动平台施加垂荡工况。基于设计温和海况下船体垂荡数据换算得到试验参数,文中在六自由度运动台上模拟垂荡工况,数据为幅值100 mm,频率0.2 Hz的正弦波。
图17是在该工况下定位系统各结构的运动姿态,可以看出左右系泊腿和YOKE的x轴数据(横荡方向)具有明显的周期性,是由于船体升沉带动系泊腿抬高或放低YOKE,定位系统绕YOKE的横摇—纵摇铰接头进行纵摇。定位系统左右系泊腿受力情况如图18所示,可以看出左右系泊腿的初始轴力约为3 985 N;动态工况下轴力变化趋势基本一致,幅值变化约为160 N,动力学效果变化4%。

图17 定位系统姿态变化Fig. 17 YOKE and mooring leg attitude diagram
图18 左右系泊腿轴力变化Fig. 18 Mooring leg force time-history diagram
同时,提升缆在保持一定张力的情况下,在动态海况作用下的张力变化如图19所示,左右提升缆的张力变化幅值分别为1.6 N、3.1 N,动力学效果为8.2%、9.7%。分析结果表明,考虑真实海况的船体运动,会显著增大解脱作业指标的动态效果。同时,对于提升缆绳在满足静态加载的强度校核情况下,其在真实海况下动力学因素在10%以内,因此在解脱作业提升缆的选型中,要考虑增加一定的安全余量。

图19 左右提升缆张力变化Fig. 19 Left/right lifting cable tension time-history diagram
3.3 现场解脱作业指标推算
根据定位系统缩比尺模型和原型结构的系统相似率,可以将试验计算数据转换成核动力平台真实结构在解脱过程的作业指标值。表5给出了平台实际作业条件下YOKE下放的角速度、缆绳张力和提升缆绳张力幅值等指标,可以为定位系统现场解脱设备选型、作业设计、人员操作安全性提供参考。

表5 作业指标原型推算Tab. 5 Prototype calculation table of key performance indicators
4 结 语
开展了海洋核动力平台定位系统解脱作业的模型试验,考虑了各阶段作业关键指标和动态作业关键指标的变化,得出以下结论:
1)在国内FPSO软刚臂系泊系统解脱经验的基础上,给出了海洋核动力平台定位系统解脱作业流程,建立了定位系统解脱作业故障树模型。
2)基于故障事件的风险传递路径给出了定位系统解脱作业的风险指标,包括提升缆绳在限位状态与解脱作业时的张力响应、法兰解脱时系泊腿下部万向节振动响应、系泊刚臂下放姿态等。搭建了定位系统1∶9缩尺比模型试验平台,模拟了定位系统全流程解脱作业,验证了海洋核动力平台定位系统解脱作业流程的可行性与有效性。
3)通过试验结果分析了风险作业指标,可以准确表征解脱作业的试验准备、提升缆预紧、拆除法兰螺栓、释放提升缆下放YOKE、解脱完成等各个作业阶段。考虑船体动力学因素,基于试验系统相似准则将风险作业指标推算到真实结构,为定位系统现场解脱设备选型、作业设计提供参考数据,可结合工程经验指导解脱作业安全高效地实施。