CFD数值分析三体船片体位置对阻力及兴波干扰影响
2022-12-15刘志强万德成
李 响,刘志强,万德成
(上海交通大学 船海计算水动力学研究中心(CMHL) 船舶海洋与建筑工程学院,上海 200240)
三体船作为高性能船舶之一,其水动力性能是目前各国研究的重点,为了我国海洋强国的发展与实现,对三体船水动力性能的探究是不可或缺的。相较于常规的单体船,三体船有快速性好、甲板空间大等优势。
在高速船中,兴波阻力占静水阻力的一大部分。对于三体船兴波阻力,三体船主体两侧的片体布局是关键。现今对三体船静水阻力的研究方法主要为试验模型方法和数值模拟分析方法。在试验研究方面,吴广怀等[1]进行了三类模型试验得出片体的横向与纵向距离能显著改变兴波阻力,甚至能决定三体船的最大航速。周广利[2]从事了大量试验得到剩余阻力系数走势不仅和侧体位置有关,而且还与航速密切相关。郦云和卢晓平[3]运用主片体均为Wigley船型的三体船进行了多种片体布局的船模试验,得到片体纵向距离对三体船兴波阻力系数有显著影响,低速时横向距离对兴波阻力系数有一定影响,但在高速时横向距离对兴波阻力系数影响显著。
船模试验方法拥有较高可靠性,但随着计算流体力学(CFD)方法精度和可靠性的逐步提高,借助高性能计算平台和先进数值方法也可以得到相对准确的数值模拟结果,同时CFD方法相对试验方法可以节约研究成本。在数值模拟方面,李培勇[4]以经典薄船理论为基础叠加计算各船波谱线,导出公式可以直观看见片体横、纵位置对兴波阻力影响。李江华和黄德波[5]采用枚举法和遗传算法优化三体船基于兴波阻力的构型,并也进行了试验验证其可靠性。邓锐等[6]使用商业软件FLUENT模拟了三种三体船侧体布置方案下的流场细节,得到了最佳布局。张英晟[7]研究了8种片体布置状态下的阻力。陈京普等[8]采用改进Dawson方法自行开发数值预报方法,讨论了三体船片体位置优化布局。李乐宇等[9]使用自主研发的求解器以黏性方法计算并优化了三体船的片体位置以得到最佳的兴波阻力。
使用黏流求解器naoe-FOAM-SJTU对4种片体位置的三体船快速性进行CFD数值仿真。首先通过数值仿真结果与试验结果对比,验证该求解器和模拟结果的可靠性。在验证基础上,对4种模型尺度三体船采用4种片体布局方案进行了静水航行数值模拟。根据数值仿真结果分析不同片体位置对流场兴波的干扰以及对静水阻力的影响。
1 数值方法
1.1 naoe-FOAM-SJTU求解器
三体船的流场计算采用基于OpenFOAM平台开发的船舶水动力学CFD求解器naoe-FOAM-SJTU(如图1所示)。该求解器在开源平台的基础上通过引入数值造波和消波模块、六自由度运动求解模块、系泊系统求解模块、重叠网格模块等针对船海水动力学的专用模块,可以实现各类船舶与海洋结构物的水动力性能数值预报。目前该求解器在船舶阻力[10-11]、耐波[12]、推进[13]和操纵[14-15]等领域已经得到了广泛的应用和验证。将采用目前的求解器针对三体船进行数值预报研究,进一步验证该求解器在三体船水动力性能预报方面的可靠性。
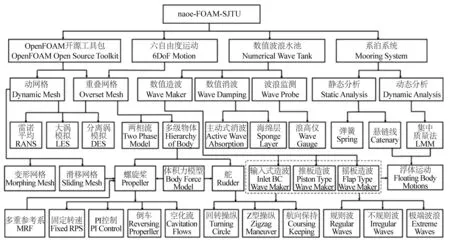
图1 naoe-FOAM-SJTU求解器框架Fig. 1 Solver frame of naoe-FOAM-SJTU
1.2 控制方程
采用不可压缩RANS(Reynolds-averaged Navier-Stokes)方程为控制方程,可表示为:
∇·U=0
(1)

(2)
式中:U和Ug分别为速度场和网格移动速度;pd=p-ρg·x为流体动压力;ρ为液体或者气体的密度;g为重力加速度向量;μeff=ρ(v+vt)为动力黏性系数的有效值,其中v为运动黏性系数,vt为湍流涡黏性系数并可由湍流模型求解得到;fσ为两相流模型中的表面张力项;fs为消波区域所施加的源项。
1.3 自由液面捕捉
自由液面的捕捉方法选择带有人工压缩项的VOF(volume of fluid)法。其中人工压缩项能有效控制数值耗散,提高自由液面捕捉能力和精度。其输运方程可以定义为:
(3)
其中,α为体积分数,代表每一个网格单元中液体部分所占整个网格单元的体积分数,α属于0和1,Ur表示相对速度,为水速与空气速度之差。

(4)
基于体积分数α,密度ρ和动力黏性系数μ分别定义为:
(5)
其中,下标g代表气体,l代表液体。
2 算例配置
2.1 模型建立
以模型尺度下的三体船为研究对象,三体船的具体主尺度模型参数如表1所示,模型如图2所示。

表1 模型参数 Tab. 1 Model parameter单位:m

图2 三体船模型Fig. 2 Trimaran model
保持计算模型片体横向距离不变,选取了4个不同的片体位置如图3所示,其中方案2为原始模型位置。以方案2为基础,方案1片体位置是向船尾移动0.05Lpp,即0.355 m;方案3片体位置是向船首移动0.05Lpp,即0.355 m;方案4片体位置是向船首移动0.1Lpp,即0.711 m。
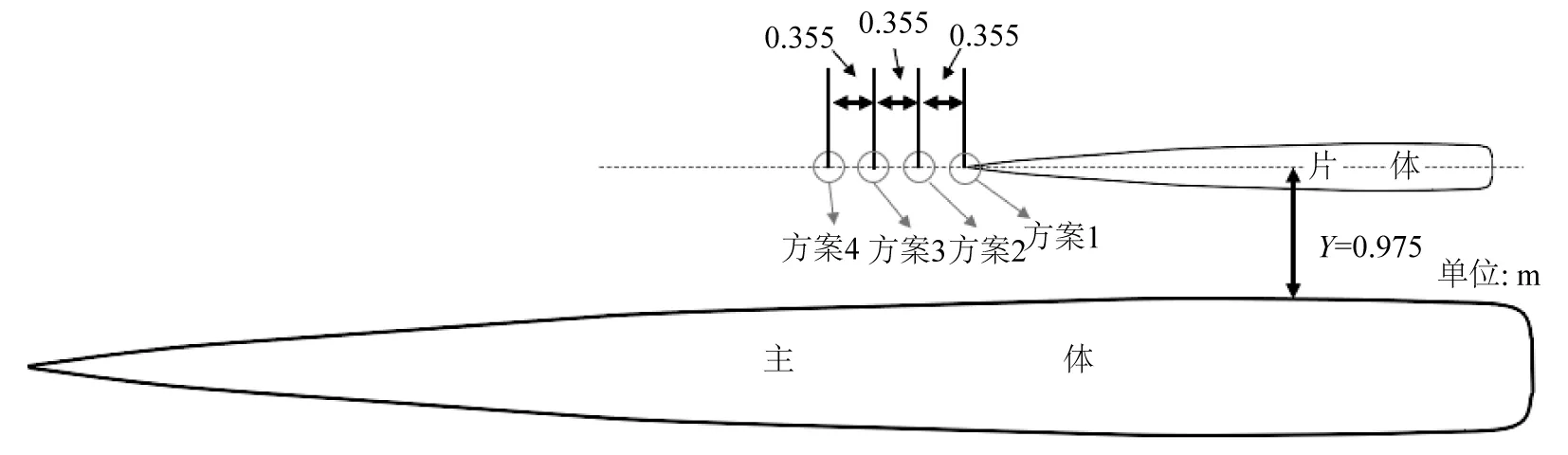
图3 三体船4种片体布局Fig. 3 4 body layouts of trimaran
2.2 网格布置
采用OpenFOAM自带的网格软件snappyHexMesh生成计算域网格。初始自由液面与船尾的交点处设置为坐标原点,x轴指向船舯,y轴指向右舷,z轴指向正上方。边界入口在x=-2Lpp处,边界出口在x=3Lpp处。
因为静水阻力计算的数值模拟具有对称性,因此采用半域进行数值计算,以节约计算资源,减少计算时间。采用船固定位置流体为匀速来流来模拟船舶在静水航行的姿态。左右边界和底边界均设置为对称边界。右边界设置在y=2Lpp处,底边界设置在z=-Lpp,上边界设置在z=0.5Lpp处。z=0平面为水气交接面,即自由液面,其上方是空气,下方是水,网格全局计算域如图4(a)所示。
采用逐步加密的网格,对自由面附近流场进行捕捉,如图4(b)所示,网格由外到内逐级加密分为4个部分,为了保持所有算例捕捉流场的精细程度一致,全部算例的加密区域不变,只改变片体变化时船体周围的网格,因此每一套网格的网格数量相似,均为272万左右。图4(c)为三体船静止时气体界面与液体界面的分相,图中z=0处横线为自由液面位置,横线上面部分为气体,下面部分为液体,黑色为船体模型位置。

图4 CFD计算域网格设置Fig. 4 Grid settings of CFD calculation domain
3 数值模拟结果及分析
3.1 静水阻力验证
通过模型试验结果与数值仿真结果对比验证该求解器的可靠性。选取Fr=0.10、0.24和0.27三个航速进行验证,验证结果如表2所示。低航速Fr=0.10工况下静水阻力数值预报误差为-4.22%,在中等航速和高航速下的数值预报误差分别为0.24%和2.31%,上述三体船总阻力计算结果表明采用的naoe-FOAM-SJTU求解器在不同航速下的阻力数值计算结果可靠,可以满足工程实际要求。万德成等[16]已证明求解器在船舶水动力性能数值预报中有着适用性和可靠性。

表2 静水阻力系数比较 Tab. 2 Comparison of coefficients of static water resistance
除了船体受力结果外,还将数值计算得到的流场结果与模型试验测量结果进行了对比。图5为船舶试验和数值模拟方法得到的尾流场,可以看到数值模拟得到的尾流场与试验得到的尾流场吻合较好。图中②和④为处于主片体之间受到主片体兴波干扰下的兴波波谷与波峰;③为受到主片体兴波干扰的片体尾兴波波峰,可以看到数值模拟与试验都有明显的波峰偏移;①为主体尾兴波受到主片体间兴波干扰后的兴波波峰,同时可以看见尾波峰在与片体尾波叠加的位置产生了明显的偏折,这一点同试验结果一致。
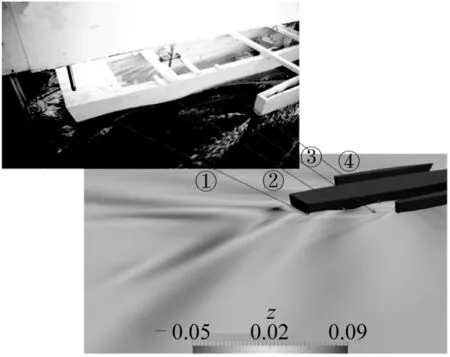
图5 Fr=0.27时试验尾流场与数值计算尾流场对比Fig. 5 Comparison of the wave fields of experiment and numerical calculation when Fr=0.27
3.2 片体位置影响分析
选择4种片体布局方案,使用naoe-FOAM-SJTU求解器对设计航速时的快速性进行数值预报,得到4种方案的总阻力系数、自由面兴波干扰和尾部流线。图6展示了4种片体布局方案数值模拟得到的总阻力系数。可以得到方案2的总阻力系数最大,方案4的总阻力系数最小,方案1的总阻力系数略大于方案4,方案3的总阻力系数介于方案1和方案2之间,由此可推测出方案2的片体布局在4种方案中有着最不利的主片体兴波干扰,方案4存在较为有利的兴波干扰。之后将通过流场的具体结果给出进一步的分析。

图6 Fr=0.18时4种片体方案总阻力系数Fig. 6 Total resistance coefficients of 4 body layout schemes when Fr=0.18
如图7所示,4个模型的片体尾部产生了明显不同的兴波干扰。在4种方案中,很明显方案2兴波干扰最为不利,方案2的片体尾部产生的第一个波峰与主体产生的一个波峰处于峰峰叠加状态,使得三体船尾部兴波波高增大,产生更大的兴波阻力,这和图6中计算得到的总阻力系数相吻合。在方案1中,片体位置相对方案2偏向于船尾,使得方案1的片体尾兴波波峰与主体产生的尾波峰相互错开,从而兴波高度相对方案2平均要小,总阻力系数也相对较小,同样与图6总阻力系数结果吻合。在方案3中,由于片体位置相对方案2更靠近船首,不仅使片体兴波与主体兴波干扰减弱,而且片体尾兴波波峰也未和主体尾兴波波峰相遇,这使得主体船尾兴波波高相比方案2的兴波波高小。但是相对于方案1,方案3兴波干扰还较为不利,从图6中也可以看到方案3产生的兴波波高相对于方案1兴波波高的平均要大些,这是由于方案3中片体尾部产生的兴波波峰接近主体尾兴波的波峰,产生了不利的兴波干扰。4个方案中方案4的片体位置最靠近船首,相比方案3有着更弱的主片体兴波干扰,从图6和7中可以看到方案4的兴波波高平均是4个方案中最小,总阻力系数也是4种方案中最小的。

图7 4种片体布置方案下的船体周围自由面兴波干扰对比Fig. 7 Comparison of wave-induced interference on free surface around ship hull under 4 different plate arrangement schemes
根据黏流数值模拟结果,本文还得到了4种方案三体船船尾处的流线情况(如图8所示)。由图中可以得到4种方案主体尾部有着不同程度的流体回流,可以看到在方案2中,主体尾部回流区最大,此时船体尾部压力最小,使整个船体压差阻力增加。同时在其他三个方案中,方案1、3、4主体船尾的回流区明显小于方案2,造成这个现象的原因就是片体纵向布局不同使兴波干扰的影响发生改变,从而改变船尾流场的状态,方案2的主体片体之前有着相对不利的干扰,使其尾兴波产生的高度增加,从而尾部低速区范围更大,速度更低。相比方案1、3、4,由之前的分析可知方案4的总阻力系数最小,也可从图8中看见方案4主体尾部流线低速的部分最窄,片体兴波影响到尾部流场的程度更低。而相比方案1和3,两个模型主体尾流宽度相似,但是从图中可以看到方案3主体尾流低速区的长度更长。
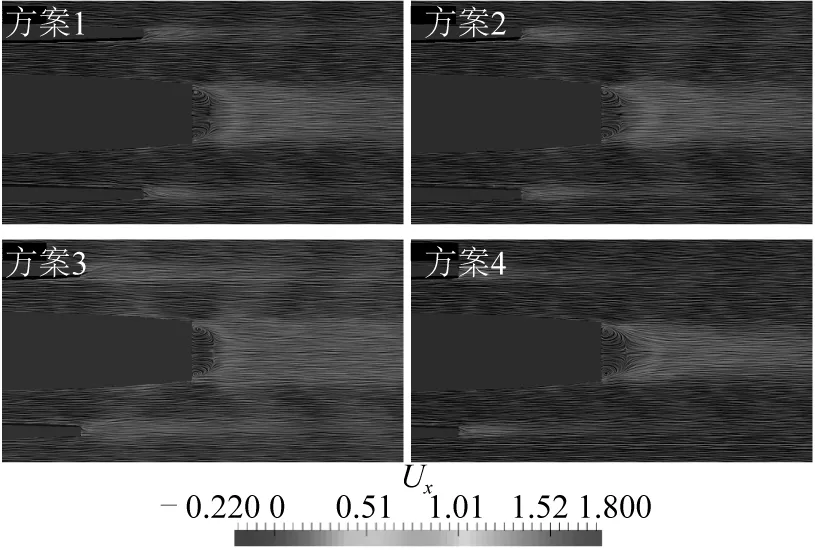
图8 4种片体方案下的船体尾部流线对比Fig. 8 Streamline comparison of hull stern under 4 different body schemes
同时,从图8中可以看到4种方案布局中片体尾部的流线会向外侧偏移,这是因为主体兴波同时在干扰片体的兴波,同样,方案2的片体兴波受到主体兴波干扰的程度最大,从而形成了相对面积更大的低速区,同样反应在了总阻力系数上。相比方案1和3,从图8中可以看到方案3中主体尾流深色区域面积更大,这表示方案3主体尾部相对方案1有着更大的低速区,产生的兴波波高更大,有着更大的总阻力系数,这也符合计算出的总阻力系数结果。
4 结 语
对三体船不同片体布置方案进行了阻力预报和流场对比分析。研究结果表明三体船片体位置布局影响着其静水阻力,并且不同的片体布置位置直接影响了三体船主、片体间的兴波干扰,通过调整片体分布可以得到较为有利的兴波干扰以及更低的兴波阻力。
使用黏流求解器naoe-FOAM-SJTU对三体船快速性进行数值模拟,通过细节流场中主体与片体间的兴波干扰得到了如下结论:
1)静水数值模拟结果与试验结果吻合较好,证明求解器naoe-FOAM-SJTU在三体船全航速下的数值计算结果可靠,并为进一步研究三体船片体布局对阻力影响和兴波干扰提供可靠的手段。
2)在三体船的片体位置布局中,控制片体横向位置不变,只改变片体的纵向位置对三体船兴波影响显著,呈现一定规律性变化趋势。同时三体船的不同片体纵向布局可能产生相似的数值模拟兴波干扰结果。
3)三体船在不同的片体位置布局下,产生不同的兴波干扰情况,片体靠近船尾时,主片体间的兴波干扰加强,此时不利的干扰会更明显,产生更大的兴波波高,但有利的干扰会使兴波波高减小。
4)三体船在不利的主片体兴波影响下,主体尾流区会存在更大的回流区,同时主片体尾部会存在更大的低速区;相反主片体干扰相对有利时,主体尾流的回流区和主体尾部低速区会相对较小。
计算分析了4种不同片体位置三体船的阻力与兴波干扰,考虑到片体横向位置对于兴波干扰影响更多取决于航速影响,而同一航速下纵向片体位置影响相对横向片体位置影响更明显,暂只分析了纵向位置的影响,横向位置影响的细节将在之后模拟分析。本研究方法可为分析三体船主片体兴波干扰相关问题提供参考方案,也表明使用黏流CFD方法可为研究三体船水动力性能及片体位置影响提供有效的分析手段。