主从结构微电网逆变器离网全过程平滑切换控制策略
2022-12-13张纯江徐菁远庆宏阳柴秀慧王晓寰
张纯江,徐菁远,庆宏阳,柴秀慧,王晓寰
(电力电子节能与传动控制河北省重点实验室(燕山大学),河北省秦皇岛市 066004)
0 引言
随着可再生的分布式电源的大规模发展[1],由分布式单元与储能单元、负荷以及监控保护装置等构成的微电网,因具有更大灵活性和独特性也得到广泛应用。微电网既能够与大电网联网运行,也能够与大电网断开独立运行[2],并且能够在并网与孤岛模式之间切换,保证对本地负载的不间断供电,因此微电网在提高供电可靠性和应急供电能力等方面有着显著的作用[3]。
逆变器是微电网的重要组成部分,其主要分为:针对主从结构的主从控制[4-9]和针对对等结构的下垂控制[10-17]两种。主从结构需指定一台容量较大的变换器作为主电源,并网时一般采用PQ控制,孤岛时一般采用V/F控制。因此,当因电网故障而离网时,系统发生非计划孤岛运行,主逆变器控制方式需从PQ控制切换为V/F控制,由于控制方法差异导致控制器输出状态不匹配而引起输出量跳变,产生较大的暂态振荡。对此,许多文献针对模式切换产生的问题进行了研究。文献[4]对控制器切换过程中的状态跟随器进行算法改进,并且通过软件锁相方法实现平滑切换。然而,上述提到的文献未考虑孤岛检测时间的延迟对切换过程的影响,由于孤岛检测的时延性,孤岛保护程序在达到规定检测时间后才会切换控制模式,突然脱离电网的逆变器无法瞬间完成PQ至V/F的控制模式切换,不仅不能及时弥补因电网断开造成的功率差额,无法维持功率平衡,同时还导致了逆变器以PQ控制模式运行在孤岛状态,失去电压支撑,致使微电网处于电压幅值和频率失控状态。文献[5]提出的基于储能广义算法的控制策略虽然考虑了非计划孤岛情况下模式的平滑切换,但其复杂程度较大,实际应用中有局限性。文献[6]通过控制电网电流环输出达到限幅器饱和值来完成平滑离网,但其限幅器的饱和值对切换过程影响较大,对相关控制器的参数取值具有一定的局限性。文献[7]和文献[8]分别在控制模式切换中加入自抗扰技术和改进预同步控制,达到了快速平滑切换效果,但是自抗扰控制器的参数设计难度较大,改进预同步中两种模式的控制量交互会对系统稳定性产生一定影响,都具有一定局限性。文献[9]根据在整个运行模式中始终采用电压控制器对负载电压进行控制的思路,提出一种电压-电流协同控制策略,保证微电网与负载始终保持功率平衡,但因需要通过计算中间变量来进行附加控制环路的设计,增加了控制器参数设计的复杂性与实施的难度。综上所述,在发生非计划孤岛时,如何实现逆变器的平滑切换仍是一个难题。
下垂控制可通过模拟发电机的P-f、Q-V下垂特性对电压和频率进行调节,在并联系统中无需联络信号就可实现功率分配[10],但由于传统下垂控制对线路阻抗的限制[11]以及并联环流问题[12],下垂控制需要进行诸多改进[13-16]。实际应用中,由于功率匹配的问题,下垂控制的应用场景具有局限性,而主从控制由于其技术更加成熟和适用性更强,在应用场景上更加广泛,目前微电网示范工程仍以主从控制为主[9]。
根据以上分析,针对PQ-V/F控制的平滑切换问题,本文提出一种基于附加电流控制器和电压保持器的组合式平滑切换控制策略。并网运行时附加电流环与电感电流环共同调节并网电流;孤岛运行时利用限幅器使附加电流环退出运行,电压控制器作为电压外环与电感电流内环共同调节输出电压。在孤岛检测期间,电压控制器作为保持器,保持孤岛模式下控制器输出量,附加电流控制器与电压保持器相互配合,共同维持逆变器输出电压,避免了电压越限问题。通过仿真和实验验证所提出的组合式平滑切换控制策略的有效性。
1 传统控制策略
1.1 主从型微电网系统
图1 给出了一种主从结构的微电网结构图,主要由公共连接点(point of common coupling,PCC)、主控单元(主逆变器和储能装置)、从控单元(光伏发电装置和从逆变器)以及用电负荷组成。PCC 闭合时,微电网中的发电单元并网运行;反之,以孤岛模式运行,不同运行模式下主逆变器的控制策略不同。
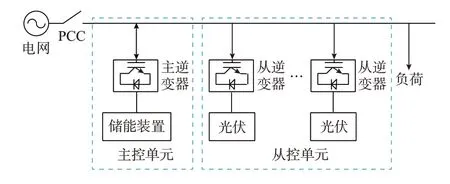
图1 主从结构微电网结构Fig.1 Structure of master-slave microgrid
1.2 主逆变器结构和控制策略
传统控制方法下主逆变器的结构与控制策略如附录A 图A1 所示,主逆变器采用中点钳位型(neutral point clamped,NPC)三电平拓扑。图A1中:Vdc为直流母线电压;Lf、Cf分别为LC 滤波器的电感和电容;主逆变器的输出电压uoabc与电感电流iLabc分别由采样电路获得,而后通过abc/dq变换后得到uod、uoq和iLd、iLq,计算出主逆变器实际输出的有功功率P和无功功率Q;θref为经过锁相环(phaselocked loop,PLL)获 得 的 坐 标 变 换 角 度;RLoad为负载。
附录A 图A1 中的电流内环用于实现电流控制,生成的信号变换到αβ坐标系下后用于空间矢量脉 宽 调 制(space vector pulse width modulation,SVPWM)形成三相SVPWM 信号。控制信号Ctrl选择不同的外环控制器,外环控制器的输出作为电流内环的参考,Gid和Giq分别为d轴和q轴的电流内环控制器传递函数。并网运行时Ctrl=1,选取功率外环,主逆变器采用PQ控制模式,输出的有功功率和无功功率跟随其参考值Pref、Qref,GP和GQ分别为d轴有功功率和q轴无功功率的功率外环控制器;孤岛运行时Ctrl=0,选取电压外环,主逆变器采用V/F控制模式,输出电压和频率跟随参考值uref、fref,Gvd和Gvq分别为d轴和q轴的电压外环控制器。
1.3 传统控制方法下模式切换产生的问题
在并网模式下发生非计划孤岛运行时,主逆变器的控制模式需要从PQ控制切换到V/F控制,并且因过程中流过PCC 的电流一般不为零,导致切换瞬间引起电流冲击,同时产生电压和频率振荡,非计划孤岛情况下产生振荡的主要原因如下:
1)主逆变器的输出功率不同。在非计划孤岛的情况下,电网断开,并网功率瞬间减小为零,但在孤岛检测完成之前,主逆变器工作于电流控制模式,仍保持给定功率参考值不变,导致逆变器的输出功率与负载功率无法匹配,导致负载的电压和频率发生突变。
2)电流内环的给定值不同。在孤岛检测完成后,控制器需要从PQ控制模式切换到V/F控制模式,控制器的直接切换导致切换瞬间的给定值发生突变,对输出电压造成很大的干扰。
传统控制方法下,在考虑非计划孤岛时的孤岛检测期间,主逆变器的输出电压、电感电流和并网电流的仿真波形如附录A 图A2 所示。微电网母线的额定相电压为220 V,t1时刻前,联网运行,采用PQ控制方法,t1时刻电网发生故障,经过t1~t2的孤岛检测时间后,切换为V/F控制方法。仿真时的入网功率为20 kW,在孤岛检测期间,电压的瞬时幅值达到400 V,已经远超过1.1 倍的额定电压,可能会导致微电网中的用电设备损坏,影响系统稳定运行。
由上述对非计划孤岛时产生冲击的原因分析和仿真结果可知,在非计划孤岛发生时若能及时调整控制器的输出功率与负载功率相匹配,并且使控制器的输出量不发生跳变,就可以实现模式的平滑切换,抑制切换瞬间产生的冲击问题。
2 组合式平滑切换控制策略
2.1 主逆变器结构
图2 给出了主逆变器的结构简化图,其中:C1、C2为 直 流 侧 两 个 分 裂 电 容;N为 电 容C1、C2的 中 性点;Lg、Rg分别为电网线路的等效电感和电阻;ig为经 过Lg、Rg的 并 网 电 流;iC为 流 过 滤 波 电 容Cf的 电流;iLoad为流入负载的电流;iL为流过滤波电感Lf的电流;io为经LC 滤波后逆变器的输出电流;uo为负载电压,也是滤波电容Cf的电压;ug为电网侧电压。图2 中的两个开关Sg和Si的作用不同,其中开关Si由主逆变器控制,电网保护开关Sg由电网控制。
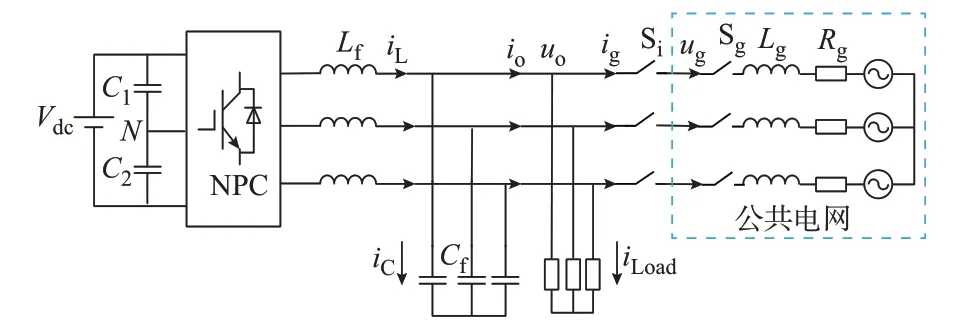
图2 主逆变器的简化结构Fig.2 Simplified structure of main inverter
本文考虑情况恶劣的非计划孤岛,当电网正常运行时,开关Sg和Si均闭合,主逆变器工作于并网运行模式,当电网突发故障时,开关Sg立刻跳开形成孤岛,通过孤岛检测后,开关Si断开,主逆变器的控制模式从PQ控制切换至V/F控制,微电网孤岛运行。
2.2 控制策略的原理与结构
根据以上分析,当图2 所示的主逆变器并网运行时,流过滤波电感的电流iL如下:

当电网发生故障时,流入电网的电流ig为零,则流过滤波电感的电流iL变为:

根据式(1)和式(2)给出基本原理:将滤波电感电流iL的控制量分为3 个部分,即iL1、iL2和ΔI。控制量iL1与实际负载电流iLoad相匹配,孤岛运行时由电压环调节器Gv产生,将负载电压控制为额定电压;控制量iL2与实际电容电流iC和并网电流ig之和相匹配,iC在稳态时由公式计算得到(具体说明见下文),ig由并网电流前馈得到,孤岛运行时自动减小为零;控制量ΔI与并网电流的扰动量和变化量之和相匹配,由附加电流环中的比例-积分(PI)调节器GⅡ产生。
图3 为本文所提控制方法的主逆变器平滑切换控制框图。图3(a)为主逆变器的总体控制框图,其中:ioabc为主逆变器输出的三相交流电流,经过abc/dq坐 标 变 换 后 得 到d、q轴 分 量iod、ioq;igabc为 并 网 三相交流电流,经过abc/dq坐标变换后得到d、q轴分量igd、igq;iCd、iCq分别为流过电容Cf的三相交流电流d、q轴分量;id,ref、iq,ref分别为主逆变器输出电流参考值的d、q轴分量;i*Ld、i*Lq分别为滤波电感电流参考值的d、q轴 分 量;ud,ref、uq,ref分 别 为 主 逆 变 器 输 出 电 压参考值的d、q轴分量;Gv为电压环调节器;GI为电流环调节器。整个控制框图由电压控制器、电感电流环与附加电流控制器组成,其中,电压控制器由电压环与电压保持器共同构成,附加电流控制器由附加电流环和限幅器共同组成。坐标变换角θ的相位跟踪控制采用了文献[4]的软件锁相方法,如附录A图A3 所示,其中频率参考值fref=50 Hz,电网相位θg由锁相环获取,当微电网系统并网运行时,控制开关信号DF=0,通道选择开关S 向下闭合,逆变器输出相位θ等于电网相位θg;当系统孤岛运行时,开关S 向上闭合,选取孤岛运行时的相位角θinv。此方法能够使θ快速跟踪参考值,保证系统从并网到孤岛的动态切换过程中,微电网的电压不会发生闪变,为不同工作模式间的平滑切换奠定了基础。由于d轴和q轴的控制结构相同,以d轴为例进行介绍,如图3(b)所示,其中ΔI是附加电流环中PI 调节器GⅡ的输出量。

图3 主逆变器平滑切换控制框图Fig.3 Block diagram for seamless transferring control of master inverter
1)电压控制器。电压控制器中采用PI 调节器Gv,孤岛运行时Ctrl=0,电压控制器作为电压外环产生控制量iLd1,与孤岛模式下的实际负载电流匹配,将输出电压uod控制为参考电压ud,ref;并网运行时Ctrl=1,此时调节器Gv的输入量为零,电压控制器作为保持器,维持上一时刻的输出值,即保持孤岛模式下调节器Gv的输出量不变,直至孤岛检测完成后,再次控制Ctrl=0,重新恢复对输出电压的调节,电压控制器t时刻的输出量iLd1(t)表示为:

式中:iLd1(t-1)为电压控制器上一时刻输出值。
2)附加电流控制器。并网运行时,由附加电流环中的PI 调节器GⅡ将输出电流iod控制到参考值id,ref,其中id,ref由给定功率计算得到。附加电流调节器中GⅡ的输出量ΔI与并网电流的扰动量和变化量之和相匹配。对于并网模式下负载发生改变的情况,在发生非计划孤岛时,需限幅器与附加电流环的相互配合,同时加上电压控制器的输出,由三者共同维持额定的输出电压。id,ref的计算公式以及限幅器的工作规则和限幅值的设置在下文进行具体介绍。
2.3 所提出控制策略的控制过程分析
本节分析所提策略下不同模式的具体工作原理和控制过程,以d轴为例,通过开关S1复位附加电流控制器,通过开关S2控制限幅器的接入与断开。其中,图3(b)中限幅器的工作规则为:并网时,并网电流ig不为零,限幅器不工作;稳态孤岛时,限幅器与电感电流环断开,限幅器不工作;非计划孤岛时,并网电流ig减为零,限幅器开始工作。
2.3.1 孤岛模式
在同步旋转坐标系下,稳态运行时,滤波电容器的电压和电流之间的关系可以表示为:

式中:ω为主逆变器输出电压的角频率。

电感电流的第1 部分参考iLd1是电压外环的输出量,将负载电压控制为额定电压,实现孤岛模式下与实际负载电流的匹配;另一部分参考-ωCfuoq为d轴电容电流的稳态值,此部分由q轴输出电压uoq决定,稳态时uoq取决于q轴输出参考电压uq,ref。因此,孤岛情况下电感电流参考值只受电压环路的影响,主逆变器工作在电压控制模式。
2.3.2 孤岛向并网模式切换
当电网恢复正常时,图2 中的开关Sg首先闭合,发出并网指令,锁相环重新获取电网相位,而后经过电压相位和幅值的预同步控制后,闭合开关Si联网运行。
闭合开关Si时,在图3 中控制Ctrl=1,电压控制器作为保持器退出调节,同时控制开关S1和S2闭合,附加电流环开始参与调节,主逆变器开始工作在电流控制模式。
2.3.3 并网模式

需要注意与孤岛模式下不同的是,电感电流的第1 部分参考iLd1为电压控制器作为保持器的输出量,保持为上一时刻孤岛模式下电压外环中调节器Gv的输出量,与孤岛时的负载电流值匹配;第2 部分参考-ωCfuoq中uoq并网钳位为电网电压,不再受电压环路的影响;第3 部分参考igd为并网电流前馈值;最后一部分参考值ΔId为附加电流环中PI 调节器GⅡ的输出量,通过附加电流环实现对输出电流的控制。综上,并网模式下电感电流参考值不再受电压环路的影响,主逆变器工作在电流控制模式,输出给定的功率Pref+jQref,输出电流的参考值计算式为:

下面对于附加电流环中调节器的输出量ΔId进行具体说明:在负载不变的情况下,电压控制器的输出量始终保持不变,但运行中与实际负载电流匹配的控制量iLd1会略有波动,且并网电流igd因干扰也会略有波动,因此附加电流环可以对上述波动进行实时补偿,提高了系统的抗扰能力;而在负载变化的情况下,附加电流环不但需要补偿以上两种波动,更主要的是需要补偿因负载改变而导致并网电流变化的这部分量。
2.3.4 并网向孤岛模式切换
非计划孤岛与计划孤岛不同的是其发生的时间不确定,孤岛前后的功率差额也不确定,本文就情况恶劣的非计划孤岛进行介绍。
假设在孤岛运行发生前,主逆变器的输出功率大于负载消耗的功率,多余的功率注入电网。图2中当电网发生故障时,电网侧开关Sg迅速断开,但此时主逆变器还未确定发生孤岛,因此开关Si仍然保持闭合,在经过孤岛检测确定发生孤岛后,开关Si才会断开。开关Sg断开后的孤岛检测时间内,电网电流igd自然为零,限幅器开始工作,设置其上下限 为±ΔId,limit,因 输 出 电 流iod突 变,iod与 参 考 电 流id,ref的差值也发生突变,经调节器GⅡ后使限幅器迅速饱和,达到限幅值,此时附加电流环不再进行调节,简化后的控制框图如图4(c)所示,d轴电感电流的参考值变为:电感电流的第1 部分参考iLd1仍保持不变,与孤岛模式下负载的电流值匹配;对于第2 部分参考-ωCfuoq,只要保证主逆变器输出电压基本不变,此项也基本不发生变化;最后一部分参考ΔId,limit为限幅器的限幅值,主要与负载的变化值有关,下面具体说明。

图4 不同模式下主逆变器简化控制框图Fig.4 Simplified block diagram of master inverter control in different modes

假设并网运行后,因负载发生改变,主逆变器为负载提供有功功率的变化量为ΔP,参考式(7)得到简化的限幅值计算式为:

但在实际选取时,一般留出10%的裕量,则选取限幅器的限幅值为:

在负载不变的情况下,主逆变器为负载提供有功功率的变化量为ΔP≈0,因此将限幅器的限幅值ΔId,limit设置为一个很小的正值即可,这个值对系统的影响可以忽略,则可以将式(8)简化为孤岛模式下的式(5),从而模拟孤岛模式下的电压控制,避免电压失控。在负载改变的情况下,ΔP的值不能忽略,按式(10)计算,最后经限幅器后输出值ΔId,limit略大于因负载变化导致的电流变化量,则式(8)中限幅器的输出量ΔId,limit与电压调节器的输出量iLd1之和与变化后的负载电流值基本匹配,维持额定的负载电压直至孤岛检测完成。由于采用锁相环,q轴输出电压被控制到接近于零,电流值也几乎为零,对于q轴的限幅 器,其上下限 为±ΔIq,limit,将ΔIq,limit始终设置为一个很小的正值即可。
综上所述,本文所提出的离网全过程平滑切换控制策略如下:在负载始终保持不变的情况下,孤岛运行时,由电压外环与电感电流内环共同调节输出电压,主逆变器工作在电压控制模式;并网运行时,电压控制器作为保持器,保持孤岛模式下调节器Gv的输出量不变,由附加电流外环和电感电流内环调节并网电流,此时附加电流环中调节器GⅡ的输出量与并网电流的扰动量相匹配。由于负载不变时电压控制器的输出量与孤岛模式下的实际负载电流量相匹配,进而将负载电压控制为额定电压,在孤岛运行结束后将电压控制器作为保持器,使电压控制器输出量始终保持为孤岛模式下的状态量,保证在孤岛检测期间电压控制器的输出量始终能够产生与负载电流匹配的控制量,维持额定输出电压。
当并网运行时负载发生改变,与负载不变的情况相比,附加电流环中调节器GⅡ的输出量变成同并网电流的扰动量与变化量之和相匹配的量,其中,并网电流的变化量即为负载的变化量。在孤岛检测期间,电压控制器仍作为保持器,但输出量无法单独再与变化后的负载电流相匹配,而需要由电压控制器输出量与附加电流环中调节器输出量之和与变化后的负载电流值相匹配,使负载电压仍能维持额定输出电压。
本文所提出的组合式平滑切换控制策略通过以下两点保证控制模式的平滑切换:
2)引入电压控制器,在孤岛运行时作为电压环对电压进行控制,在其他状态下作为保持器始终保持为孤岛模式下的输出量,保证输出量连续平滑,从而避免孤岛检测完成瞬间因控制器切换而造成的输出量突变,实现控制器输出量的平滑切换。
孤岛检测完成后,断开图3(b)中的开关S1和S2,同时重新控制Ctrl=0,使电压外环重新投入工作,主逆变器再次运行在电压控制模式。
3 仿真分析与实验验证
为了证明本文所提控制方法的有效性,通过仿真和实验进行验证和分析。根据国际上IEEE 微电网防孤岛标准[18],并参考文献[17]对孤岛检测时间的设定,以下所有孤岛检测时间都设定为20 ms完成。
3.1 现有改进平滑切换方法仿真分析
为了验证本文所提平滑切换方法的优越性,对文献[6]提出的改进平滑切换方法进行了仿真,附录A 图A4 为仿真结果,其中主逆变器的主要控制参数如下:电网电流环控制器PI 参数中比例系数设为2、积分系数设为8;电压环控制器PI 参数中比例系数设为4、积分系数设为80;电感电流环控制器PI 参数中比例系数设为20、积分系数设为600。由于文献[6]中d轴限幅器对平滑切换的影响较大,此处将限幅器最大限幅值uod,max设为两种情况:uod,max=313 V和uod,max=314 V。
附录A 图A4 中Uoφ(φ=a,b,c)为微电网母线电压,ILφ为主逆变器三相滤波电感电流,P为主逆变器输出功率,逆变器系统在0~1 s 孤岛启动,1 s 时并网,3 s 时发生非计划孤岛,3.00~3.02 s 之间进行孤岛检测。图A4(a)为uod,max=313 V 情况下的仿真结果,可以看出在非计划孤岛期间,母线电压过渡没有发生过压情况,但母线电压出现明显凹陷并且主逆变器电感电流有比较明显的瞬态冲击。图A4(b)为uod,max=314 V 情况下的仿真结果,在该情况下主逆变器电感电流切换过程平滑且无冲击,但母线电压在非计划过程中发生了明显的电压抬升。同时,根据图A4(c)中两种情况的有功功率变化可以发现,在并网过程中,uod,max=313 V 情况下功率调节过程相对平滑,功率抬升较小,但调节过程较长;uod,max=314 V 情况下功率调节过程较短,但是功率冲击较大。以上仿真结果说明文献[6]中提出的改进平滑切换方法无法兼顾并网跟踪的快速性和非计划孤岛运行时的稳定性,同时也说明限幅器参数的设置对平滑切换具有较大的影响,且文献中也并未对其参数设置进行详细说明,因此文献[6]所提出的平滑切换控制方法具有一定局限性。
3.2 组合式平滑切换方法的仿真分析
为了验证本文所提出的离网全过程平滑切换控制策略的正确性与可行性,在MATLAB/Simulink软件中进行仿真验证。以1 台主逆变器和1 台从逆变器为例,系统及控制器相关参数的设置见附录A表A1,模式切换前后各单元的功率分配情况见表1,其中负号代表吸收功率。

表1 模式切换前后各单元功率分配情况Table 1 Power distribution of each unit before and after mode switching
本文所提出的控制方法由并网模式切换到孤岛模式的仿真结果如图5 所示,与传统控制方法下的仿真结果(见附录A 图A2)进行对比。同样,为了模拟非计划孤岛情况,将孤岛检测时间设置为20 ms,3.50 s 时发生非计划孤岛,3.52 s 时孤岛被检测出来,此后运行于孤岛模式。图5 中ILoφ为从逆变器φ相滤波电感电流,Igφ为φ相并网电流。

图5 本文所提控制方法下非计划孤岛的仿真结果Fig.5 Simulation results of unintentional islands controlled by proposed method
由图5 可看出,在模式切换过程中,传统控制方法下的孤岛检测期间,母线中会产生很大的电压突变,其峰值约为400 V,同时电流在切换过程中也存在很大畸变,因此电压、电流均无法实现平滑切换。而采用本文所提的组合式控制策略后,母线电压能够基本保持不变,几乎不再产生冲击,并网电流和主逆变器的电感电流在模式切换过程中也能保持平稳,实现了电压、电流的平滑切换。同时,从逆变器的输出三相电感电流保持稳定,不受主逆变器控制模式切换的影响,也实现了平滑切换。
附加电流环加入后,逆变器并网运行时负载的变化会引起附加电流环的调节。逆变器在1 s 之前运行于孤岛模式,1 s 之后并网运行,在3.50 s 时电网发生故障,图2 中的电网保护开关Sg立刻断开,经过20 ms 孤岛检测后,主逆变器的控制开关Si断开,此后运行于孤岛模式。整个过程中负载不发生变化时主逆变器的输出有功功率曲线见附录A 图A5(a),过程中输出量ΔId的仿真结果见图A5(b)。并网时因附加电流环投入运行,输出量ΔId会有轻微的波动用来补偿电流的波动值,在孤岛检测的3.50~3.52 s期间,附加电流环与电压控制器互相配合以及对限幅器的设置,使得ΔId的输出很小,对系统的影响几乎可以忽略,因此电压并没有发生越限。
为了更充分地证明附加电流环的调节作用,在并网运行时投入负载,在2 s 时加入3 kW 负载,2.5 s时加入2 kW 负载。整个过程中负载发生变化时主逆变器的输出有功功率曲线见附录A 图A6(a),过程中输出量ΔId的仿真结果见图A6(b)。负载变化后非计划孤岛时的微电网母线电压和主逆变器三相滤波电感电流见附录A 图A6(c)。由图A6(a)和(b)可以看出,在并网运行负载发生变化时,附加电流环中调节器GⅡ的输出量ΔId主要用来补偿负载的变化量,同样在孤岛检测的3.50~3.52 s 期间,附加电流控制器的输出量没有突变,保证了输出值的平滑性,避免了因控制器输出量突变而产生冲击。同时,从图A6(c)可以看出,由于本文设计的组合式控制器中的限幅器留有10%裕量,负载变化后的负载电压在非计划孤岛发生时有细微的抬升,而主逆变器的组合控制器为了匹配新的负载功率,对自身的电感电流进行了改变,负载变化后的负载电压和主逆变器电感电流在整个过程能够保持平滑过渡,证明了所提方法同样能够适应负载变化下的并离网平滑切换。
通过对比本文所提组合式平滑切换方法与文献[6]所提平滑切换控制方法的仿真结果可以看出,本文所提方法下的逆变器系统对参数变动的适应性更强,均能在非计划孤岛时实现电压和电流的平滑切换,相比已有平滑切换方法具有更高效和更稳定的特性。
文献[9]同样研究了非计划孤岛的平滑切换方法,其控制方法能较好地实现非计划孤岛下模式的平滑切换(仿真和实验参见文献[9])。但文献[9]除了有对输出电流的控制环路外,还添加了附加电压环。此外,文献[9]采用的电压控制器控制量还需要通过额外的阻抗计算获得。以上两方面均增加了控制策略的复杂性,增加了控制策略的实施难度。而本文提出的控制策略保留了原有电压环结构,通过利用电压环自身的控制器构成电压保持器,只附加了对输出电流的控制环,很大程度上简化了控制结构,在达到几乎同样效果的前提下降低了方案的实施难度。
3.3 实验验证
StarSim HIL 系统外接DSP 控制器的闭环实验平台如附录B 图B1 所示,主电路部分在StarSim HIL 进行搭建,由外接DSP 进行控制。实验采用的系统和控制器参数以及模式切换前后各单元的功率分配情况均与仿真一致,如附录A 表A1 和表1所示。
与仿真相同,在实验过程中,断开电网保护开关Sg形成非计划孤岛,20 ms 后孤岛检测完成,此时断开主逆变器控制开关Si。图6(a)和(b)分别给出了传统控制方法与本文所提控制方法下,离网过程中主逆变器的a 相母线电压ubus,a和a 相电感电流iLa的实验波形。可以看到,在本文所提控制方法下的模式切换过程中,a 相电压始终能保持稳定,a 相电感电流也能平滑过渡。本文所提控制方法下负载不变时从逆变器的实验波形如附录B 图B2 所示,可以看出从逆变器的a 相母线电压和a 相电感电流平滑过渡,说明从逆变器不受主逆变器模式切换的影响,能够实现运行模式的平滑切换。
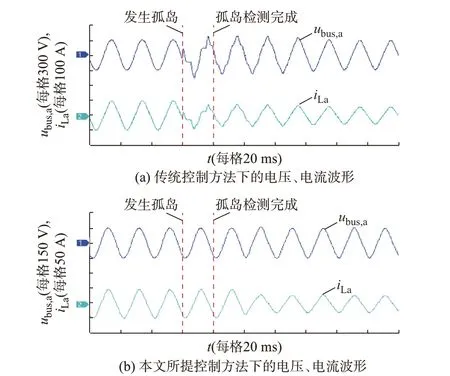
图6 负载不变时主逆变器的实验波形Fig.6 Experimental waveforms of master inverter without load change
为验证负载变化后,本文所提控制方法能否保证负载电压和主逆变器电感电流在非计划孤岛时刻的平滑过渡,根据附录A 图A6 的负载变化进行了变负载下的非计划孤岛实验验证,离网过程中主逆变器的a 相母线电压ubus,a和a 相电感电流iLa实验波形如图7 所示。从图7 的实验结果可以看出,即使改变了负载大小,负载电压和主逆变器电感电流依然可以保证在非计划孤岛时平滑切换,图7 的实验结果与附录A 图A6(c)的仿真结果基本相同,更加充分地证明了本文所提方法同样能适用负载变化后负载电压和主逆变器电感电流的平滑切换。
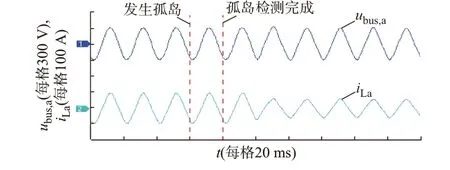
图7 负载变化时主逆变器实验波形Fig.7 Experimental waveforms of master inverter with load change
为了验证系统的稳定性,进行了多次并离网的切换实验,附录B 图B3 给出了整个切换实验中各电气量的输出波形图。在每次进行离网切换时,a 相母线电压和a 相电感电流总能保持稳定过渡,同时主逆变器输出的功率也可以实现平稳过渡。实验结果验证了本文所提出的组合式平滑切换控制策略能够保证逆变器在发生非计划孤岛运行时模式的平滑切换。
4 结语
基于主从结构的微电网逆变器从并网模式切换到孤岛模式时会导致孤岛检测期间电压出现不可控的问题,本文提出了一种基于附加电流控制器和电压保持器的组合式平滑切换控制策略,能够在非计划孤岛运行时实现主从结构逆变器的离网全过程平滑切换,主要工作如下:
1)并网运行时引入控制输出电流的附加电流环,由附加电流环与电感电流环共同调节并网电流。孤岛运行时附加电流环退出运行,由电压外环与电感电流内环调节输出电压。
2)引入电压控制器,在孤岛模式下作为电压外环控制输出电压;并网模式下与孤岛检测期间,电压控制器作为电压保持器,保持孤岛模式下控制器的输出量;孤岛检测期间,电压控制器与附加电流控制器互相配合,共同维持逆变器输出电压。
由于本文所提方法采用的控制器比传统控制器复杂,理论上的动态和暂态稳定特性有待进一步分析,此部分内容将在后续研究中进一步完善。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
