基于类噪声量测数据的自动发电控制振荡模式辨识方法
2022-12-13李凯斌侯凯元王克非
李凯斌,陈 磊,闵 勇,侯凯元,沈 毅,王克非
(1. 清华大学电机工程与应用电子技术系,北京市 100084;2. 国家电网有限公司东北分部,辽宁省沈阳市 110180)
0 引言
频率振荡是一种区别于传统低频振荡的振荡类型,其振荡频率一般低于0.1 Hz,又被称为超低频振荡。该振荡表现为系统各处的频率同调振荡[1]。在频率振荡中,由一次调频过程引发的振荡称为一次调频振荡,其对应的模式称为调速器模式;由自动发电控制(automatic generation control,AGC)引发的振荡称为AGC 振荡,其对应的模式称为AGC 振荡模式,或简称AGC 模式[2]。在频率振荡中,对于一次调频振荡的研究较多[3],而AGC 振荡的研究主要集中于基本振荡原理[4-6]、影响因素[7-9]和控制策略的研究。实际电网中发生过的几次AGC 振荡事件[10],都呈现振荡突然发生并持续较长时间的特征。监测AGC 模式,对避免此类振荡事件的发生具有现实意义。
系统的振荡模式可以通过搭建数学模型来获得[11],也可以通过对量测信号进行分析获得。基于量测信号识别系统振荡模式的方法可以分为基于大扰动信号的方法[12]和基于小扰动信号的方法[13]。基于大扰动信号的方法依赖于大扰动的发生,无法实时掌握模式的信息;而基于小扰动信号的方法则在系统正常运行时就能实施。系统中小的负荷随机扰动,会导致系统量测信号中出现随机响应(也称为类噪声信号),可以利用该类噪声信号对系统振荡模式进行估计[14]。
随机子空间法[15]是一种基于类噪声信号的振荡模式辨识方法,该方法除了能够计算出系统的振荡模式,还能同时识别出对应的模态,且模态估计比较准确[16],在土木工程领域已有比较成熟的应用[17-18],在电力系统领域,也已被用于低频振荡模式的在线辨识[19-20]。本文将基于随机子空间法,并结合聚类算法,设计AGC 模式自动辨识算法。然后,分别采用仿真数据和电力系统实测数据进行验证。该方法不依赖于系统模型和参数,利用系统正常运行时的类噪声量测数据,即可对AGC 模式进行辨识。
1 设计思路
1.1 基本思路
随机子空间法应用于AGC 模式辨识存在以下问题[16,21]:1)由于数值误差会出现虚假模式;2)对参数变化比较敏感,即使是真实的系统模式(以下称真实模式),也会因设置参数的变化发生微小的变化;3)辨识结果不唯一,除了AGC 模式,还会存在其他振荡模式。为避免随机子空间法的这些问题,本文采用以下处理方法。
1)首先选取和频率振荡强相关的量测作为算法的输入,提取其中的类噪声数据。然后,进行随机子空间法辨识。接着,采用聚类算法对不同参数设置下的辨识结果进行聚类处理,得到真实的振荡模式。
2)对聚类算法给出的属于同一簇的辨识结果取均值,并作为聚类中心,以减小参数变化引起的误差。
3)AGC 模式属于频率振荡模式,相比于其他模式,具有振荡频率低、全网频率同调振荡的特点。因此,在采用随机子空间法得到辨识结果后,可以根据频率和模态进行筛选,剔除辨识结果中的非频率振荡模式,只保留符合频率振荡模式特征的辨识结果,进行后续的聚类分析。
1.2 数据选取
因为AGC 振荡与频率、联络线功率、区域控制偏差(area control error,ACE)强相关[2],所以可以选用机端频率、联络线功率等直接量测数据或由它们计算得到的ACE 数据作为输入数据来进行AGC 模式辨识。AGC 振荡的频率一般低于0.1 Hz,若要辨识出最高频率0.1 Hz 的AGC 模式,则根据采样定理,输入数据的采样间隔应不大于5 s,一般采样系统均能满足此采样间隔的要求。由于随机子空间法中的输出协方差矩阵是用有限长的数据进行估计,采样点数越多,估计越精确。此外,输入的量测数据应涵盖AGC 振荡的多个周期,并且输入数据在满足采样点数要求的同时,还要保证有足够长的采样时长。实验中发现,一般采样点数在3 000 以上、采样时长在30 min 以上时,随机子空间法才能获得比较好的AGC 模式辨识效果。
1.3 数据预处理
实际量测数据中,除了随机子空间法所需要的类噪声数据,还包含随机子空间法不需要的低频分量。为了提高信噪比,增加辨识精度,可以采用文献[22]提出的去趋势方法来处理输入数据。
1.4 模式和模态辨识
随机子空间法中假定阶数nl和Hankel 矩阵行块数i都会影响辨识结果,并且在辨识结果中,不仅有真实模式,还有由于数值误差而产生的虚假模式,需要对辨识结果进行一系列处理来剔除结果中的虚假模式,留下真实模式。因为真实模式在不同参数下变化不大,而大部分虚假模式并不会在不同的参数下稳定存在,所以可以使用稳定图[23]或聚类算法[20]对结果进行处理,剔除其中散乱分布的结果,留下集中分布的结果。最后,将集中分布的结果取均值作为最终结果,也能起到减小误差的作用。
1.5 模式筛选
首先,根据频率进行筛选。频率振荡模式的频率一般小于0.1 Hz,并且一般也不会低于0.001 Hz,所以可以将基于随机子空间法得到的辨识结果中振荡频率过高或过低的结果予以剔除。
然后,根据模态进行进一步筛选。因为频率振荡模式具有全网频率同调振荡的特点,所以可以根据机端频率的模态向量M把机端频率非同调的结果予以剔除。模态置信度可以用来表征2 个模态向量之间的相关性,模态向量M1和M2之间的模态置信度IMAC定义如式(1)所示:

2 个模态的相关性越高,IMAC越大,最大值为1。模态筛选计算各辨识结果的机端频率模态向量M与各分量都为1 的参考模态向量M0(表示机端频率完全同调)之间的模态置信度,如果模态置信度大于阈值γε,则认为该辨识结果的机端频率同调,属于频率振荡模式;反之,则认为该辨识结果的机端频率非同调,不属于频率振荡模式。本文中,取模态置信度阈值γε=0.995。
1.6 调速器死区影响分析
实际系统中调速器存在死区,频率在调速器死区内外的系统类噪声响应中反映的频率振荡模式存在区别。频率波动在调速器死区以内时,一次调频不动作,所以利用类噪声数据进行频率振荡模式辨识,辨识结果中不会有调速器模式,只有AGC 模式,而且该AGC 模式是不考虑一次调频环节的;但当频率波动在调速器死区以外时,辨识结果中可能会有一次调频模式和考虑一次调频环节影响的AGC模式。
从目前实际数据分析的情况看,由于频率波动大部分在调速器死区内,调速器模式不显著。虽然不排除调速器模式也会出现在最终辨识结果中的可能,但一般在辨识结果中很难反映出来,而AGC 模式则可以可靠地辨识出来。由于频率在调速器死区内或死区外时,一次调频不影响或影响AGC 模式,可能会导致AGC 模式出现2 个辨识结果。当算法最终给出多个辨识结果时,如何判断各个辨识结果所属的频率振荡类型还有待研究。
1.7 模式聚类
本文采用的聚类算法是基于密度的噪声应用空间 聚 类(density-based spatial clustering of applications with noise,DBSCAN)算法[24]。该算法具有不用事先指定簇类个数的优点。
图1 给出了随机子空间法在不同参数下的AGC 模 式 辨 识 结 果,其 中,Δξmax=0.118 1 和Δfmax=0.002 7 Hz 分别为AGC 模式阻尼比和频率辨 识 结 果 最 大 误 差;σ2ζ=4.5×10-4、σ2f=6.5×10-7(Hz)2和r=0.228 5 分别为阻尼比方差、频率方差和阻尼比与频率之间的相关系数。从图1 可以看出,虽然阻尼比和频率辨识结果之间没有明显的相关关系,但是AGC 模式辨识结果在这2 个维度上的分布方差差距极大,若是采用欧氏距离衡量样本之间的距离,则不能很好地评估样本之间的相似性。因此,本文在应用DBSCAN 算法时,采用马氏距离[25]计算第k和第l个样本[ξk fk]和[ξl fl]之间的距离D([ξk fk],[ξl fl]),如式(2)所示,其中S为AGC 模式阻尼比辨识结果和AGC 模式频率辨识结果之间的协方差矩阵。
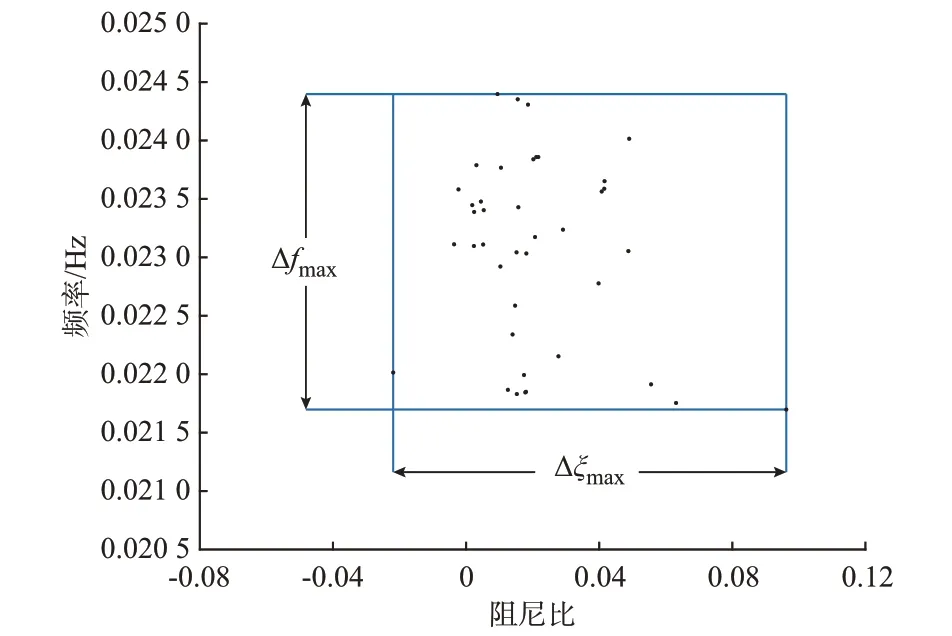
图1 AGC 模式辨识结果Fig.1 Identification results of AGC mode
由于阻尼比和频率辨识结果之间没有明显的相关关系,故S的非对角元素为0,而对角元素为多次试验后得到的不同参数下AGC 模式阻尼比和频率辨识结果的方差平均值。以式(2)计算样本之间的马氏距离,可以将不同维度上的数据根据方差进行归一化,以消除因不同维度上的数据尺度和量纲不同为聚类带来的负面影响[26]。
2 AGC 模式辨识算法流程
AGC 模式辨识算法流程如下。根据所述算法流程,即可实现AGC 模式的自动辨识。
步骤1:选取数据以及数据预处理。选取机端频率、联络线功率偏差或者ACE 量测数据作为算法的输入,并进行去趋势处理。
步骤2:利用随机子空间法获得大量初步辨识结果。将量测数据输入随机子空间法,将i从imin变化到imax,对于每一个i,令假定阶数nl从nmin变化到nmax,对每一个假定阶数nl,在采用随机子空间法进行奇异值分解时,保留前nl个奇异值,将其他的奇异值强制置为0,这样对于每一个nl,基于随机子空间法得到nl个模式模态的初步辨识结果。通过这个步骤,将获得随机子空间法在不同i取值和假定阶数下的辨识结果。本文中,设定nmin=10,nmax=50,imin=50,imax=200。
步骤3:频率筛选。将初步辨识结果中,振荡频率大于0.1 Hz 或小于0.001 Hz 的辨识结果予以剔除。
步骤4:模态筛选。对于步骤3 筛选后留下的辨识结果,计算其机端频率的模态向量与各分量都为1 的参考模态向量M0之间的模态置信度IMAC,将模态置信度IMAC小于阈值γε的结果予以剔除。
步骤5:第一步聚类。对于每一个i,将经过步骤4 筛选后留下的不同假定阶数下的辨识结果输入DBSCAN 算法,将划分到同一簇的辨识结果取均值作为初步聚类中心。计算马氏距离时,协方差矩阵S的对角线元素分别为1.3×10-3和6.5×10-7,DBSCAN 算 法 的 密 度 阈 值ρε取0.75×(nmaxnmin+1)≈31。
步骤6:第二步聚类。将所有的初步聚类中心输入DBSCAN 算法,将划分到同一簇的辨识结果取均值,并作为最终聚类中心,即最终的AGC 模式辨识结果。计算马氏距离时,协方差矩阵S的对角线元素分别为2.8×10-4和1.7×10-7,DBSCAN 算法的密度阈值ρε取0.5×(imax-imin+1)≈76。
3 算例验证
3.1 仿真算例验证
本文仿真算例的系统模型采用文献[5]搭建的多区多机系统,在其基础上加入一次调频死区,具体模型及参数参见附录A,通过特征值分析,得到该系统一次调频不起作用或起作用时的AGC 振荡模式阻尼比分别为3.63%、11.89%,振荡频率分别为0.021 0、0.027 6 Hz。在各个负荷上施加零均值高斯白噪声模拟负荷的随机波动。
算例1:采集9 台机组的机端频率信号作为AGC 模式辨识算法的输入数据,采集信号的采样间隔为1 s,采样点数为4 000 个。
图2 给出了执行算法步骤5 后得到的i=110 时的辨识结果。图2 中,结果1 为未通过频率筛选的辨识结果;结果2 为通过频率筛选但未通过模态筛选的辨识结果;结果3 为通过频率筛选和模态筛选,但被第一步聚类判定为噪声的辨识结果;结果4 为第一步聚类给出的簇。后文图4 中的图例具有与此相同的含义。
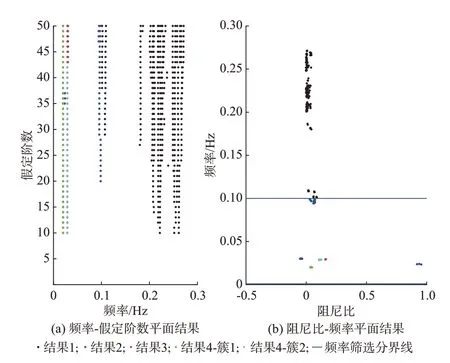
图2 仿真算例的辨识结果Fig.2 Identification results of simulation case
从图2 可以看出,频率筛选可以剔除大量频率过高或过低的非频率振荡模式(结果1)。经过频率筛选后,仍有大量辨识结果,剩余的部分辨识结果(结果2)由于其机端频率的模态非同调,未通过模态筛选。经过频率筛选和模态筛选后,剩余结果3和结果4,由于结果3 的辨识结果较少,未达到DBSCAN 算法的密度阈值,而结果4 在每个假定阶数下稳定存在,辨识结果较多,因而最终第一步聚类将结果4 划分为2 个簇,将结果3 划分为噪声。将簇中的点取均值,给出的2 个初步聚类中心的阻尼比分别为4.32%、11.93%,频率分别为0.020 0、0.028 9 Hz,和仿真系统的2 个真实AGC 模式较为接近。
图3 给出了i取不同值时的初步聚类中心的分布情况。从图3 可以看出,i取某些值时,AGC 模式辨识算法可能无法得到2 个初步聚类中心,但在大部分的取值情况下,是可以得到2 个初步聚类中心的,所有的初步聚类中心在第二步聚类后,被划分为2 个簇,将簇中的点取均值后,得到2 个最终的AGC模式辨识结果的阻尼比分别为3.83%、12.75%,频率分别为0.020 1、0.028 8 Hz,算法较为精确地辨识出了2 个AGC 模式。
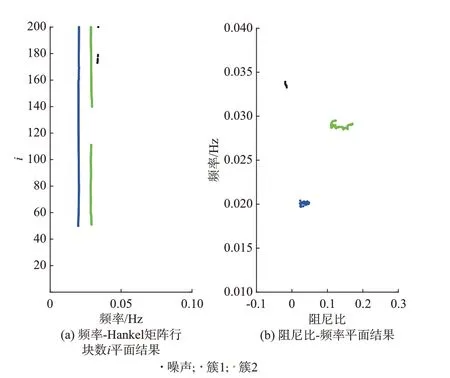
图3 仿真算例的全部初步聚类中心Fig.3 All primary cluster centers of simulation case
算例2:采集9 台机组的机端频率信号作为AGC 模式辨识算法的输入数据,一共采集10 个时间窗,每个时间窗内采样点数为4 000 个,采集的信号的采样间隔为1 s,每个时间窗之间没有重叠。
表1 给出了不同时间窗内AGC 模式的最终辨识结果,可以看出,本方法能够获得对于系统AGC模式的大致估计;但在部分时间窗内,误差可能较大,有时甚至无法辨识出全部的2 个AGC 模式。因此,若要对系统的AGC 模式进行在线实时监测,本方法的时效性和精确性还不满足要求,还需要做进一步的改进。

表1 不同时间窗的AGC 模式辨识结果Table 1 Identification results of AGC mode with different time windows
3.2 实际数据验证
2021 年10 月11 日,某电网发生振荡频率约为0.019 6 Hz 的AGC 振荡。采用振荡发生前50 min内15 台机组的机端频率量测信号作为输入数据,进行AGC 模式辨识,采样间隔为1 s,采样点数为3 000 个。
图4 给出了i=150 时的辨识结果。从图4 可以看出,频率筛选和模态筛选剔除了大量非频率振荡模式(结果1 和结果2),剩余的结果中部分结果分布比较分散,被聚类算法划分为噪声(结果3),另外的一些结果由于分布集中,被聚类算法划分为了3 个簇,表2 给出了这3 个簇的聚类中心的阻尼比和频率。从振荡频率来看,初步聚类中心1 和2 的频率与AGC 振荡事故中的振荡频率比较接近。

图4 实际电网的辨识结果Fig.4 Identification results of real power grid
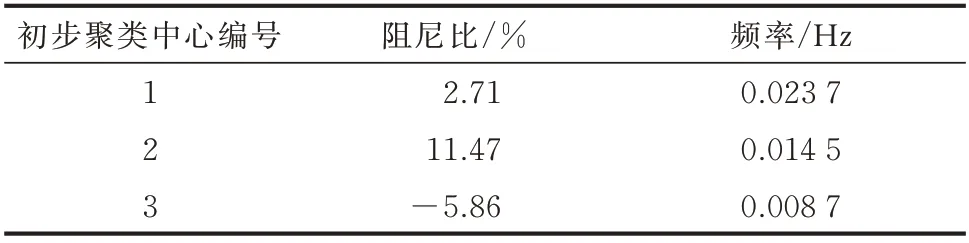
表2 实际电网的初步聚类中心Table 2 Primary clustering centers of real power grid
图5 给出了i取不同值时的初步聚类中心的分布情况。从图5 可以看出,在i取不同值时,初步聚类中心3 对应模式出现次数较少,而初步聚类中心1和2 对应模式出现次数较多,因而通过第二步聚类得到2 个簇,分别对应初步聚类中心1 和2 代表的模式,这2 个簇的聚类中心(也即最终AGC 模式辨识结果)的阻尼比和频率分别为2.56%和0.023 4 Hz,以及11.47%和0.014 6 Hz,2 个辨识结果的频率都与事故中的振荡频率0.019 6 Hz 比较接近。因为作为算法输入的频率量测数据在部分时段,其频率波动超出调速器死区范围,所以这2 个AGC 模式最终辨识结果可能分别对应频率波动在调速器死区内和死区外时的AGC 模式。根据文献[5]的结论,一次调频动作时,AGC 模式的阻尼比会更高,因此,阻尼比为11.47%的最终辨识结果可能对应频率波动超出调速器死区时的AGC 模式,另一个最终辨识结果对应频率波动在调速器死区以内时的AGC 模式。从实际系统AGC 振荡预警预防的角度,上述结果已经可以对可能发生的振荡进行预警。

图5 实际电网的全部初步聚类中心Fig.5 All primary clustering centers of real power grid
4 结语
本文尝试将随机子空间法应用于AGC 模式的辨识。考虑到应用随机子空间法对AGC 模式进行辨识所面临的问题,在设计算法时采取了相应的改进措施,以提高AGC 模式的辨识可靠性,并减少误差。
通过仿真算例和实际算例对所提方法进行了验证。结果表明,采用所提方法得到的最终辨识结果与真实AGC 模式比较接近。但所提方法仍存在以下不足:1)单次辨识的精度不够高,无法用于AGC模式的在线实时监测,但可以获得对系统AGC 模式的大致估计结果;2)当类噪声数据的频率波动超出调速器死区时,最终辨识结果可能不止1 个,方法自身无法判断各个辨识结果所属的振荡类型,需要人为对最终辨识结果的振荡类型做进一步的判断;3)方法中包含一些人为确定的参数,这些参数需要根据实际情况进行适当调整;4)在实际数据验证中,因为暂时无法获得实际系统的真实AGC 模式,所以只能将算法辨识结果的频率和事故中的振荡频率进行比对,而难以对AGC 最终辨识结果的准确性做出正确的判断。如何克服该算法存在的这些不足将是进一步研究的方向。
论文在研究过程中受国家电网公司东北分部科技项目资助,谨此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
