钩爪式爬壁机器人研究进展
2022-12-12余淑荣徐养峰张来喜吴明亮
余淑荣,徐养峰,张来喜,吴明亮
(兰州理工大学机电工程学院,甘肃 兰州 730050)
近年来,在粗糙陡峭的壁面探测、桥梁安全检测、摩天大楼幕墙清洁、矿坑内壁探测等方面对爬壁机器人有重大需求[1]。为实现在竖直或者倒置壁面上攀爬,爬壁机器人必须同时具备附着和移动功能[2]。一般来说,爬壁机器人根据作业任务和使用环境来决定其移动方式和附着方式。爬壁机器人的附着方式主要有磁粘附、负压粘附、仿生材料粘附以及钩爪抓附等,移动方式主要有轮式、足式和履带式移动等[3-4]。
目前,仿生学的热潮正盛,仿生机器人的发展取得了丰硕的成果。仿生研究方法是在分析生物运动的功能原理和作用机理的基础上,多学科交叉研究、探索,制造仿生机器人的研究方法[5-6]。学者对自然界中具有超强爬行能力的昆虫进行研究,发现很多昆虫为了应对复杂的粗糙表面,通过钩爪进行抓附。几乎所有的成虫在附节末端都有钩爪结构,其钩爪与接触表面的微凹谷或凸峰形成机械锁合,或直接刺入接触表面,确保昆虫能够在爬行表面上稳定停留。通过对昆虫的足部结构和步态研究发现,附节和末端钩爪之间的柔性连接是其可靠抓附的关键,而且昆虫爪子与腿部倒刺之间的对抓模式能够提供稳定的抓附力[7-8]。本文对钩爪式爬壁机器人的研究成果进行了详细介绍,分析了爬壁机器人设计中的关键问题。
1 研究现状
自然界中存在大量粗糙壁面,传统的磁吸附和吸盘吸附都不适合用于这类壁面,而钩爪抓附方式具有传统吸附方式不具有的优点,对粗糙壁面有很好的适应性。下面从抓附方式、抓附机构以及移动方式三方面介绍钩爪式爬壁机器人研究现状。
1.1 抓附方式
钩爪式爬壁机器人利用尖钩与粗糙壁面的机械锁合提供吸附力。最初人们受攀岩者和昆虫攀爬动作启发,设计了勾附模式的攀爬机器人,此种方式采用的机械结构简单,易于控制,但抓附力不封闭、抗干扰能力差。研究人员通过对昆虫步态进一步研究发现,昆虫的腿部倒刺与爪子对抓可以提供稳定的抓附力,自此粗糙壁面爬壁机器人开始采用对抓模式。
1.1.1勾附模式
勾附是指机器人的钩爪依靠重力作用勾附在墙壁的凸起或者凹坑表面,满足机器人在粗糙壁面内攀爬的附着方式。
Kim等[9]在2005年开发了第一台钩爪式爬壁机器人SpinyBotII,如图1所示,该机器人使用柔性爪片作为抓附结构,爪片上分布多个极细的钩刺,可以提供多点抓附。2013年,宾夕法尼亚大学的Clark等采用类似SpinyBotⅡ的柔性爪片[10]研制了质量只有200 g的两足爬壁机器人BOB[11],BOB可在粗糙坚硬的壁面上攀爬。受蟑螂腿部柔性连接启发设计的柔性爪片,可以减少壁面的反作用力,同时使更多的爪片参与抓附,以改善机器人的抓附性能。
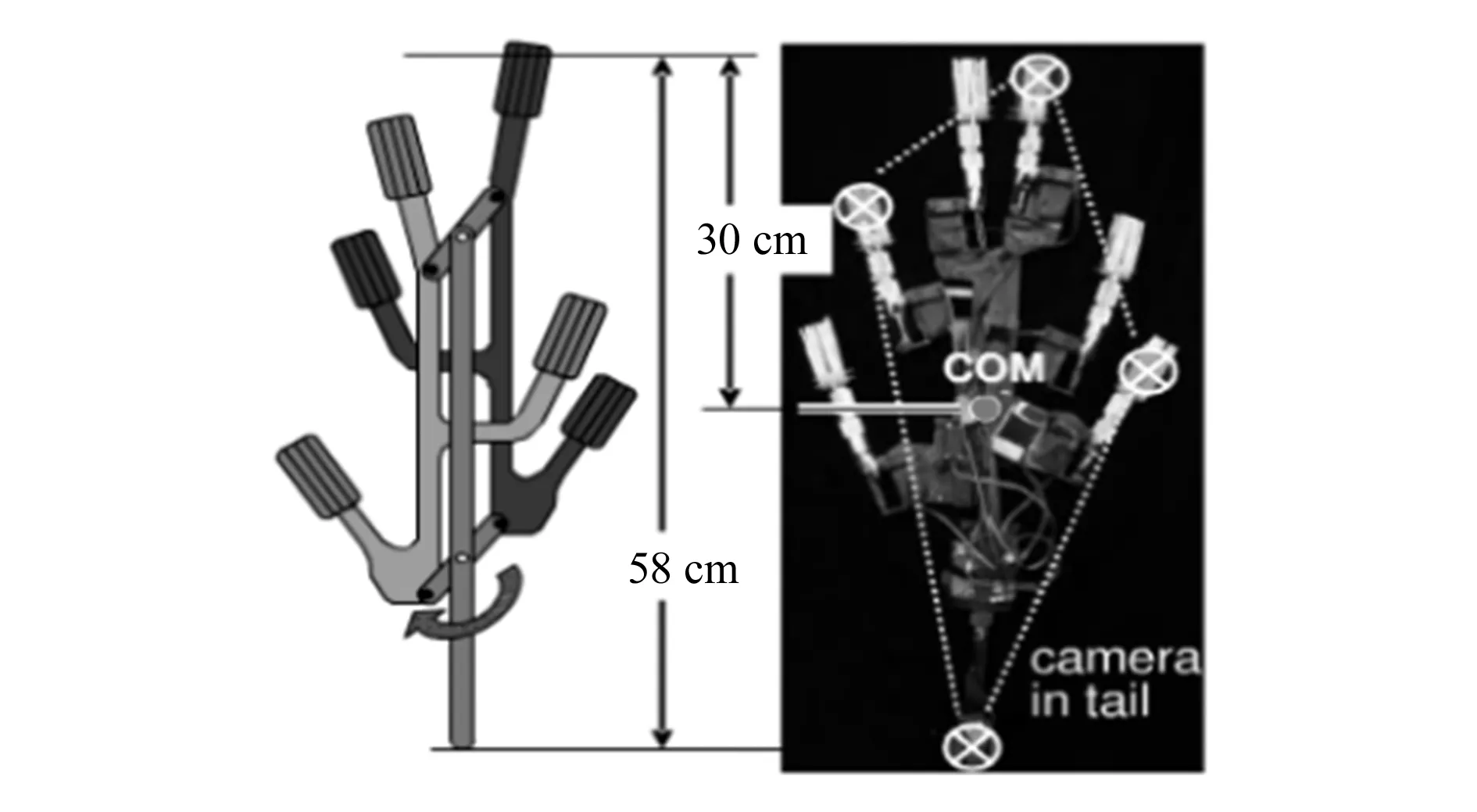
图1 SpinyBotⅡ机器人
2012年Parness等[12]研制了爬壁机器人DROP,如图2所示,DROP的柔性爪片呈圆周阵列分布于轮子周围,该机器人具有较高的爬行速度且能从水平面攀爬到45°壁面,但是攀爬过程中爪片依靠暴力脱附,对机器人稳定性和能耗都有影响。Jensen-Segal等[13]从提高机器人能耗效率的角度出发,研发了一台类似倒立摆结构的钩爪爬壁机器人ROCR,如图3所示,该机器人通过控制加有质量块的尾巴左右摆动,实现机器人左右足上两个钩爪交替勾附和脱附,使机器人向上攀爬。

图2 DROP机器人
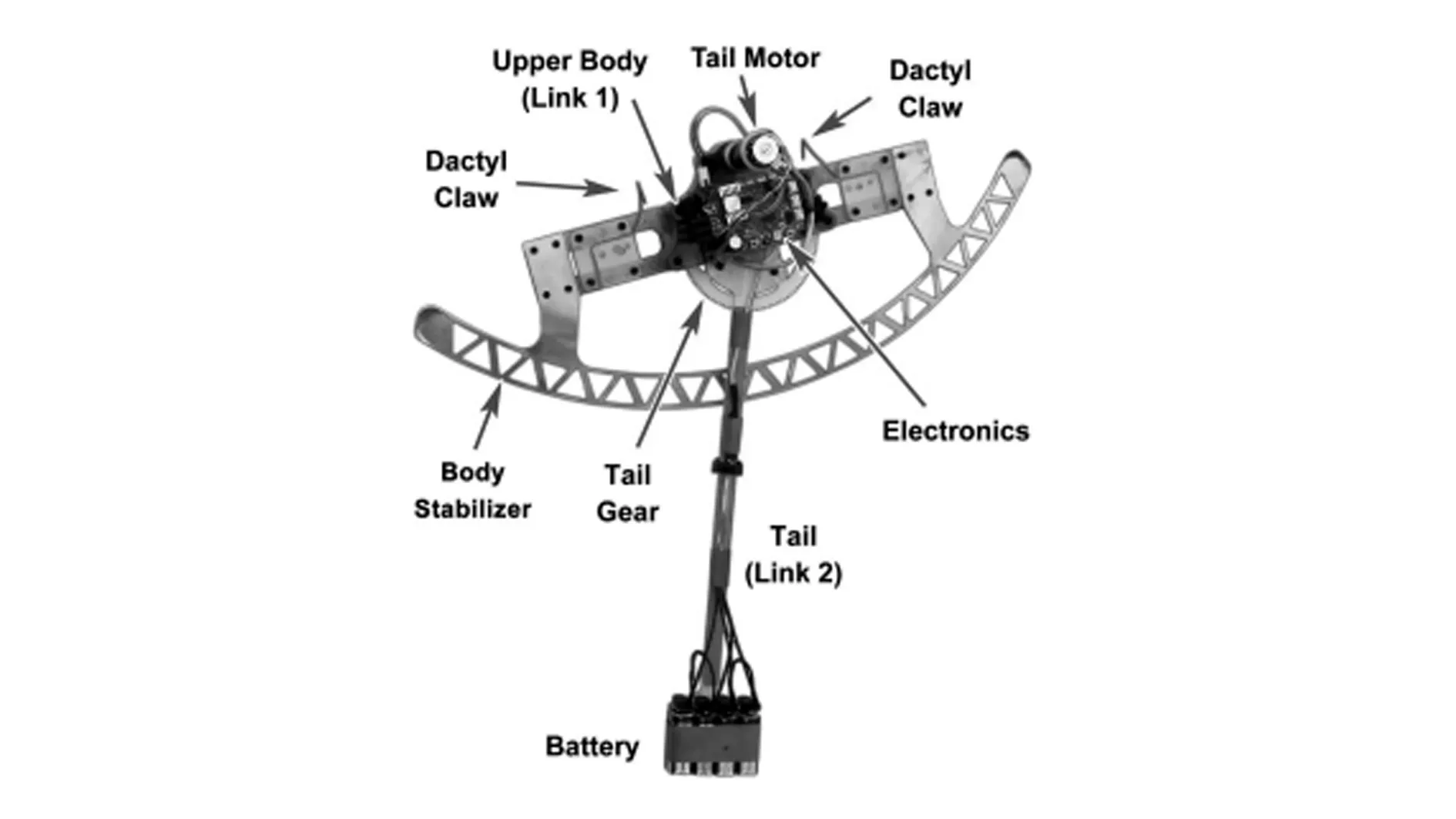
图3 ROCR机器人
南京邮电大学的Xu等[14]提出了尖爪与微凸相互作用的力学模型,并提出了尖钩的设计方法,开发了基于平行四杆机构的八足爬壁机器人。陈东良等[15]深入分析了爪刺与壁面接触时切入角对攀爬可靠性的影响,设计了主体为四杆机构的六足钩爪式爬壁机器人。Ji等[16]采用一种简单的机械锁合方式设计了柔性钩爪脚掌结构,采用对角爬行步态设计了四足爬壁机器人。西安理工大学的刘彦伟等[17]受昆虫攀爬动作启发,提出了一种基于切比雪夫连杆机构的钩爪式双足爬壁机器人,由舵机驱动连杆机构带动双足在壁面上交替爬升,具有一定的越障能力。Liu等[18]针对多壁任务需求,提出了爪刺抓附、特殊材料粘附以及吸盘吸附三重组合模式的爬壁机器人,在面对不同粗糙度壁面时采用不同的吸附结构。
上述机器人在机体结构上各不相同,研究人员模仿了昆虫足部柔性附节结构,在机器人设计中采用柔性爪片作为抓附结构,改善了机器人的环境适应性。勾附模式适用于竖直面或者小于90°的壁面,不适用于大于90°的壁面或者倒置壁面。
1.1.2对抓模式
研究人员发现昆虫在坚硬的粗糙壁面攀爬时不仅足部柔性附节起重大作用,同时足部的对抓模式也是其稳定攀爬的关键。
2005年美国波士顿动力公司研制出Rise系列爬壁机器人,RiseV1与RiseV2以柔性爪片作为抓附结构,使用足间对抓模式,可以在粗糙的树干上稳定爬行[19-20]。RiseV3(图4)在RiseV2的基础上,增加了一个俯仰自由度,可实现竖直壁面到水平壁面的过渡[21]。

图4 RiseV3机器人
凯斯西储大学的Daltorio等受到蟑螂足间对抓模式的启发,在Climbing Mini-whegs机器人[22]的基础上,研发了爬壁机器人Screenbot[23]和Digbot[24],实现了机器人在竖直和倒置铁丝网上的攀爬。
Parness等[25]基于RiseV2所用柔性钩爪结构,设计了LEMUR IIB机器人(图5),可使机器人在更加倾斜的岩石表面攀爬。中国科学技术大学的胡重阳等[26]设计了一种仿生六足爬壁机器人,采用足内对抓模式,机器人在壁面内运动时具有转向能力。
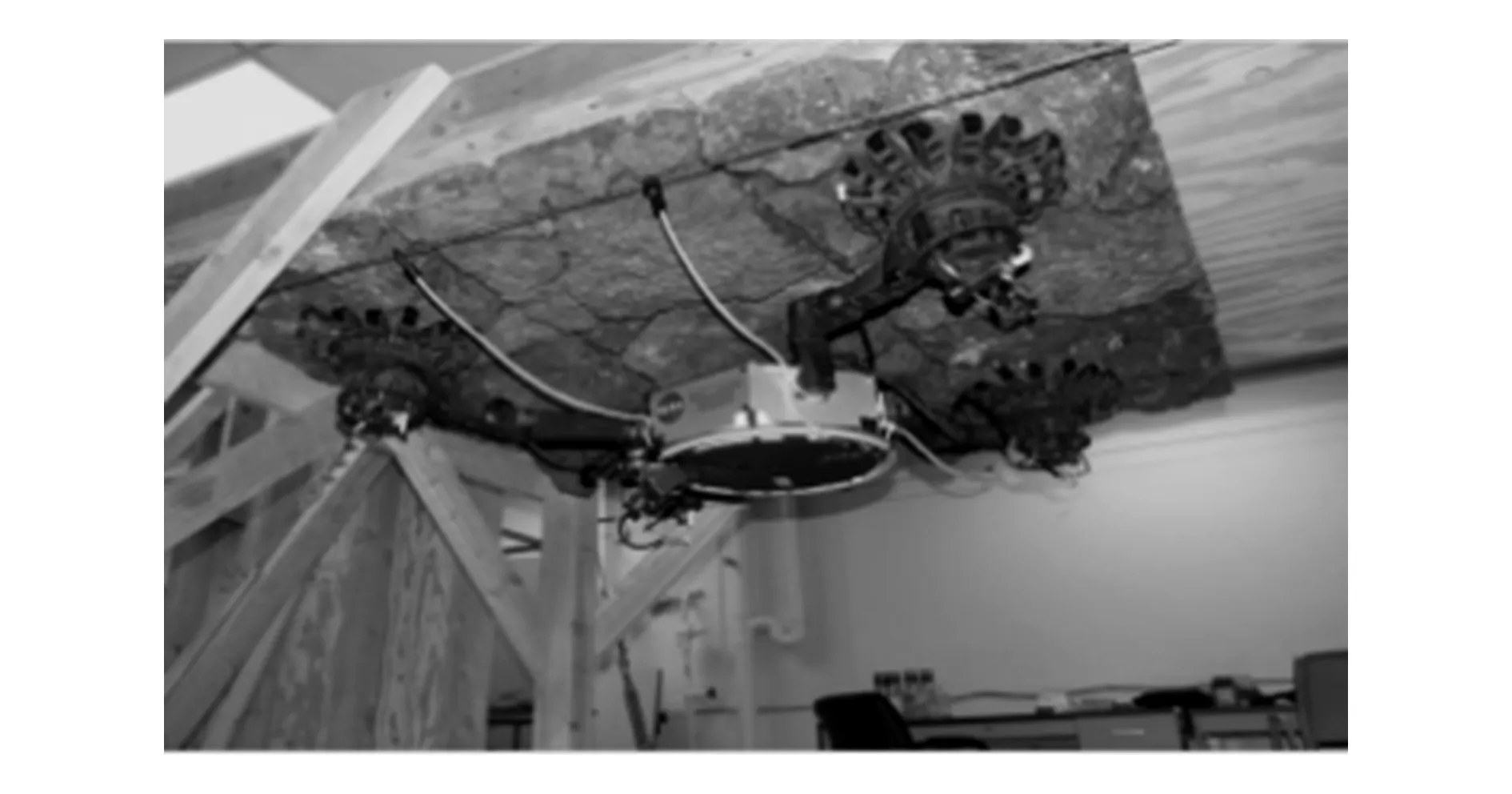
图5 LEMUR IIB 机器人
近年来,模仿尺蠖的机器人越来越多,广东工业大学的李明军等[27]受尺蠖勾爪启发,提出了一种基于形状记忆合金(SMA)的钩爪式柔性末端夹持器,能产生9.1 N的夹持力,相当于其自身重力的10倍。刘彦伟等[28]基于对尺蠖步态以及腹足对抓原理的研究,设计了对抓模式的两足爬壁机器人,机器人通过舵机驱动躯体屈曲和伸展,前行或后退。江西理工大学的王文慧等[29]模仿尺蠖躯干结构,采用形状记忆合金弹簧设计了机器人躯体,通、断电的时候会使得机器人躯体收缩或舒展,向前爬行,最高速度为4.1 mm/s。
国内一些研究团队还设计了许多类型的抓附手爪。管兴伟等[30]通过对昆虫跗节链运动机理的研究,设计了一种仿生柔性脚掌,由一根钢索驱动直径约为30 μm的钢针实现抓附。王贝等[31-32]设计了一种“十字形”钩爪抓取模块,并提出了爪子与三维壁面相互作用的抓握辨别算法,提高了抓附模块的抓附能力。江南[33]基于竖直粗糙面横向作用球面接触模型,设计了粗糙壁面对抓手爪结构。
综上所述,对抓模式可以提供封闭的抓附力,增强机器人的抓附稳定性,使爬壁机器人在竖直壁面内任意方向攀爬甚至在倒置顶面作业。
1.1.3密集刺抓附
密集刺抓附是Cutkosky等开发的一种攀爬水泥墙的新方法。该研究团队设计了微刺阵列[34],并讨论了微刺与表面粗糙度相互作用的关系。基于负载共享理念将载荷均匀分布在每个微刺上,最大限度地提高了微刺的抓附能力。2016年,该团队为喷气推进实验室的RoboSimian四足机器人设计了一种新的手爪,如图6所示,该手爪采用密集的微刺阵列作为抓附机构,密度为19根/cm2,大小为120 mm×100 mm,对混凝土砌块的平均剪切附着力可达710 N(183 kPa)[35],能够在陡峭的岩石表面上行走。
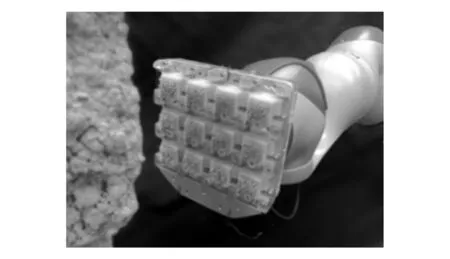
图6 RoboSimian手爪
2019年该团队针对大型爬行机器人,提出了一种新型末端抓附手爪。手爪表面覆盖着密集的微刺,如图7所示,可在岩石表面产生较高的剪切应力。手爪上增加了柔顺的关节和微粒干扰垫,使末端执行器在不需要复杂控制的情况下能够适应各种地形,当施加250 N或更大的载荷时由于强有力的肌腱和手爪的真空应用,整个柔性手爪刚性增大[36],因此能可靠地抓附在粗糙壁面上。

图7 微刺阵列手爪
钩爪式爬壁机器人在粗糙壁面上稳定抓附,需要同时克服重力及重力引起的颠覆力矩。勾附模式能提供向上的切向力,使机器人挂在墙壁上,但无法产生指向壁面的抓附力。对抓模式以及密集刺抓附能产生稳定的抓附力,平衡重力及重力引起的颠覆力矩,是钩爪式爬壁机器人采用的主要抓附方式。
1.2 抓附机构研究
21世纪初开始了钩爪式爬壁机器人的研究,目前已取得了重大突破。
1.2.1尖钩及抓附条件研究
尖钩是钩爪式爬壁机器人的关键部件,其结构设计十分重要。为了使机器人的钩爪具备昆虫钩爪的优良性质,有学者研究了机械钩爪与粗糙表面特征的关系。文献[14]基于球形微凸体的理想模型,建立了尖钩尺寸与粗糙度表征参数之间的关系(图8),得到钩爪尖端尺寸关系式:
(1)
式中:r为钩爪尖端半径;Ra为凸起颗粒的平均半径;Sm为颗粒平均间距;θ为接触角度。该研究考虑了作业壁面的表面特征对钩爪尺寸设计的影响,使钩爪有更好的抓附性能。
图8 微凸体理想模型
文献[37]提出钩爪可稳定抓附的θ角度范围及条件:
θb≥θmin
(2)
θmin=θload+arccotu
(3)
式中:θb为圆心轨迹法向与壁面法向的夹角;θmin为最小可用角度;θload为载荷角;u为尖钩与壁面之间的摩擦系数。当θb≥θmin时,接触点为可用接触点,如图9所示。文献[37]还模拟了尖钩截面在粗糙壁面轮廓上滑动的方式,测定了单位长度内(1 cm)可用微凸体的数目。Provancher等[38]通过实验研究发现爪刺的方位角(爪刺轴向与壁面法向夹角)为45°~60°时爪刺的抓附性能最佳(图10)。
图9 尖钩与粗糙壁面作用模型

图10 粗糙壁面简化模型
钩爪尖端尺寸与壁面微凸体表征参数有直接关系,尖钩半径越小,抓附性能越好,但尖钩半径太小也会导致爪刺刚度不足,因此应根据实际环境合理设计钩爪尺寸。可抓附条件以及爪刺方位角的研究为钩爪式爬壁机器人的前期设计奠定了基础,并且改善了机器的抓附性能。
1.2.2钩爪抓附机理研究
建立钩爪尖端在竖直粗糙面的作用模型,有利于分析接触角、摩擦系数等对钩爪抓附作用的影响。2002年,Dai等[39]将砂纸表面的颗粒和钩爪尖端假设为均匀的球形表面,提出昆虫钩爪尖端与粗糙水平面作用模型,如图11所示,简化了钩爪尖端与粗糙微凸起作用模型。
图11 水平面作用模型
刘彦伟[40]基于钩爪粗糙水平面模型假设设计了钩爪尖端在竖直粗糙表面的作用模型,如图12所示,分析了壁面法向力对抓附性能的影响。所建模型符合竖直壁面抓附环境,为爬壁机器人研究提供了可靠参考。
以上两种模型揭示了钩爪与粗糙面的抓附机理,为尖钩结构设计以及参数设计(尖端直径、切入角度、弯曲角度等)提供了理论依据。

图12 竖直面作用模型
1.2.3手爪结构设计
手爪结构设计包括柔性爪片设计以及抓附结构设计。目前,柔性爪片结构主要有两种:1)Rise项目组研发的柔性爪刺足片[10],如图13所示;2)中国科学技术大学研制的仿生柔性爪片[17],如图14所示。前者利用形状沉积制造技术,将硬质聚合物和软质聚合物结合起来制造爪片柔性连接结构,后者利用S型结构实现高柔顺性,作用类似于昆虫的柔性跗节链结构。手爪结构一般是多个柔性爪片阵列组合,尽可能把负载平均分配到多个尖钩上,以增大柔性手爪的抓附力。
图13 柔性爪刺足片
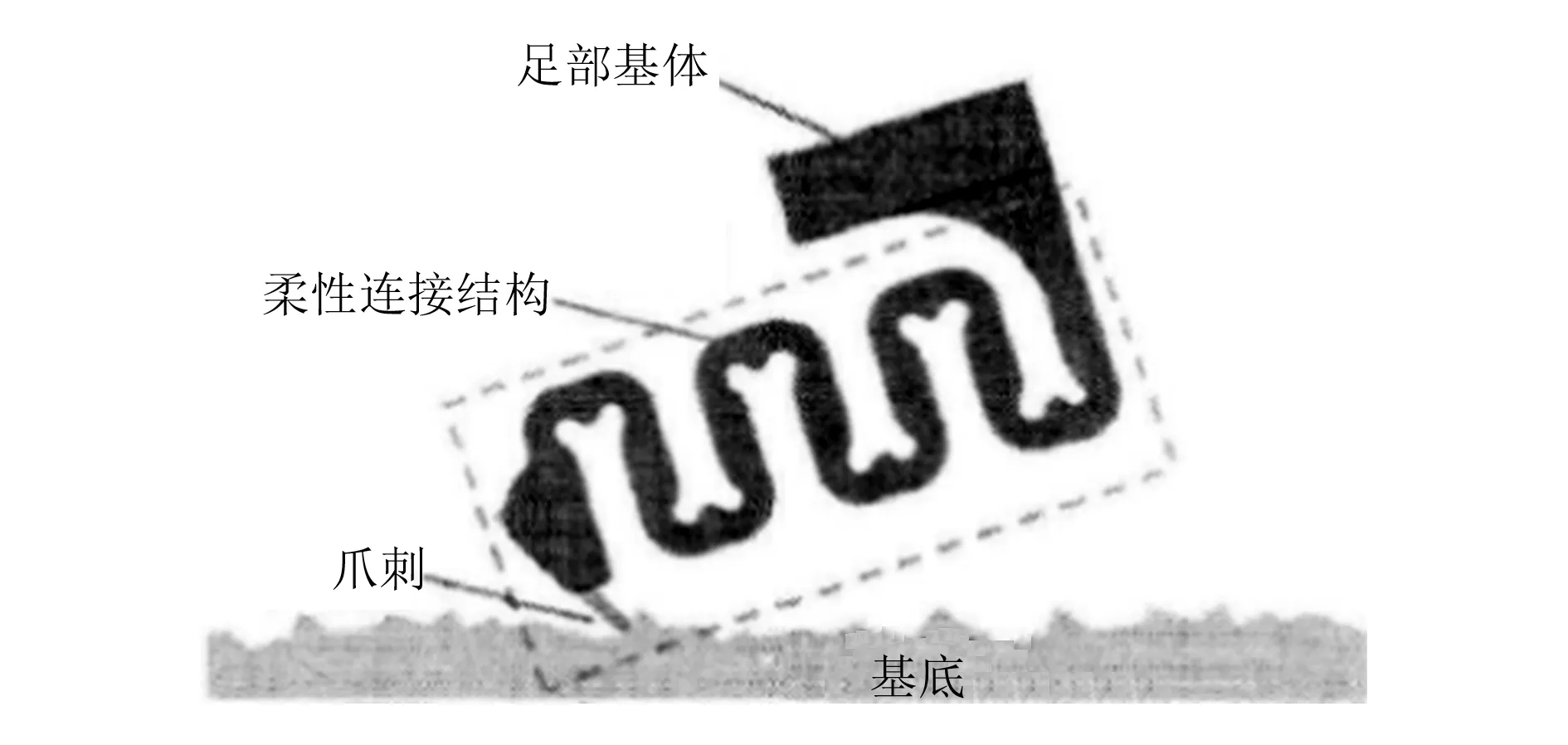
图14 仿生柔性爪片
手爪抓附结构最初采用单向勾附模式,结构简单、抓附率高,但抓附性能不稳定,易受风载荷及振动的影响。基于对昆虫足部及运动步态的研究,人们设计了对抓结构以提高机器人的稳定性及负载能力。
1.2.4驱动控制方式
抓附手爪的驱动方式包括主动抓附和被动抓附。主动抓附是通过电机驱动手爪相向运动实现抓附,被动抓附是利用储存在弹簧中的能量实现抓附。
刘彦伟[40]设计的爪刺式爬壁机器人,第一代和第二代抓附手爪采用主动抓附方式,利用电机驱动手爪抓附,第三代抓附手爪使用被动抓附方式,利用储能装备抓附。被动抓附方式抓附力由弹簧预变形决定,难以根据实际环境调整力的大小。对比发现,主动抓附控制利用力的反馈信息,结合一定的控制策略,能够实现柔顺控制,是实现智能控制的首选方式。
抓附机理研究基于理想模型,已经获得了重要成果。在抓附机理分析的基础上进行抓附机构的结构设计以及驱动控制,目前已经开发了许多类型的抓附手爪,大多引入柔性部件,具有良好的环境适应性。
1.3 移动方式
附着方式和移动方式是爬壁机器人研究的两大热点,钩爪抓附主要配有以下3种移动方式。
1.3.1轮式
轮式结构的特点是具有移动的高速性,其主要得益于轮式结构的优势,具有比其他结构更高的移动速度,控制系统也比较简单,现在已经有了比较成熟的结构形式。
2012年,美国国家航天局喷气推进实验室研制了第一台轮式机构的钩爪式爬壁机器人DROP[12],其抓附爪片呈圆周阵列分布,有较高的爬行速度。中国科学院物理科学研究所设计了类似的轮式爬墙机器人Tbot,将一种柔顺的爪刺分布在车轮圆周内,能够以10 cm/s的速度攀爬砖墙并且可从水平表面稳定地过渡到垂直表面[41]。
1.3.2足式
足式机器人对于壁面的适应性更好,在结构上有更多的类型。足式结构利用孤立的地面支撑而不是轮式机器人所需的连续地面支撑,具有很强的环境适应性和运动灵活性,能轻易跨越工作面上的凸起和沟槽。
现有的钩爪式爬壁机器人多采用足式结构,比如SpinyBotⅡ[9]、RiseV1[19]和RiseV2[20]等为六足机器人,RiseV3[21]是四足机器人,BOB[11]是两足机器人。就目前的研究成果看,足式移动是钩爪式爬壁机器人最主要的移动方式。
1.3.3履带式
履带式爬行机构多用于磁吸附机器人或者负压吸附机器人,具有较高的移动能力与越障性能,但目前仅有少数钩爪式爬壁机器人使用过。2019年西安理工大学的刘彦伟等[42]设计的仿生爪刺对抓式爬壁机器人采用履带式爬行机构,履带由数十个仿生爪刺对抓足通过链条结构连接构成,能够实现在粗糙壁面上快速、稳定爬行。相比足式结构,履带式结构运动速度较快,抓附面积更大,在特定的规则面内有较好的应用前景。
综上所述,轮式结构的优点是速度快,履带式结构的优点是接触面积大,但这两者对凹凸不平的壁面适应性较差。足式结构运动时只需要离散的点接触壁面,并且通过增加足式结构自由度可以使机器人的运动更加灵活,对粗糙复杂的竖直壁面适应性更强,是钩爪式爬壁机器人的主要移动方式。
2 发展趋势
基于对钩爪式爬壁机器人研究现状的分析,结合机器人技术发展的总体方向,爬壁机器人的发展趋势如下。
2.1 刚柔一体化结构
从生物的优异结构中受到启发,研究人员更加注重柔性部件对爬壁机器人性能的影响。在机器人结构设计中,柔性材料可以赋予机器人自然柔顺性,与刚性机器人相比,刚柔耦合机器人的适应性以及抗干扰的能力更强,如SpinyBotⅡ[9]和Rise机器人[19-21]均采用柔性手爪作为抓附结构。未来钩爪式爬壁机器人将向着刚柔一体化结构的方向发展。
2.2 新的能源供给方式
新形势下,机器人朝着功能多元化和集成化方向发展,机器人工作需要消耗更多的能量[43-44]。针对特殊环境作业的机器人,传统的有缆供电方式或者蓄电池供电方式都有一定的局限性,一种新的能源供给方式正在应用到机器人领域,微波无线供电是一种利用磁耦合的能量传输方式,能远距离动态传输能量,是未来爬壁机器人供能的理想方式[45-46]。
2.3 抓附机构与移动机构协同工作
附着方式和移动方式是爬壁机器人研究的主要方面,机器人移动机构与抓附机构之间相互协调,才能保证机器人在壁面上灵活移动。Haynes等人设计的RiseV3[21]机器人采用力反馈式的控制方法,根据外界环境对腿部作用力的反馈信号来改变腿部四杆机构传动比,使运动更加稳定可靠。机器人能够感知外部环境变化并协调各部分动作是爬壁机器人发展的趋势。
3 结论
通过对钩爪式爬壁机器人抓附方式与移动方式的研究,得到以下结论:
1)钩爪式爬壁机器人的抓附方式包括勾附、对抓和密集刺抓附。利用柔性部件能够提高机器人的抓附性能,是钩爪式爬壁机器人研究的重大进步。模仿昆虫足部设计的对抓结构可以提供稳定的抓附力,能满足倒置面、受风载荷以及其他环境干扰等复杂的壁面。
2)机器人的移动方式有足式、轮式以及履带式,按现有研究成果看,足式结构具有高灵活性以及对复杂地形较强的适应性,是爬壁机器人主要的移动方式。
随着爬壁机器人研究的日益深入,钩爪式爬壁机器人对粗糙壁面的适应性和移动灵活性方面的能力不断提高,未来将能够满足复杂环境作业的需要。
