分数阶PMSM混沌系统的柔性同步控制研究
2022-12-12王军光郭浩轩
王军光 郭浩轩
(1.国能榆林化工有限公司;2.东北石油大学电气信息工程学院)
永磁同步电动机(PMSM)系统具有良好的动态特性,具有高效率、高性价比、高可靠性等特性[1],适用于中低端的工业应用功率范围,被广泛应用于石油石化等领域[2~4]。 分数阶PMSM系统由于在系统模型中引入了分数阶微积分理论,优化了系统模型,因而能够更好地表现永磁同步电机的动态特性[5]。
PMSM系统是含有多变量耦合的非线性系统。 对非线性动力系统的动态特性进一步研究发现,PMSM的状态变量存在混沌现象[6]。文献[7]讨论了PMSM系统混沌现象的存在, 发现在一定条件下,PMSM系统状态变量呈现杂乱无章的变化,但相图中存在吸引子。 PMSM系统的混沌现象会影响电机工作的稳定性,为了消除此种不稳定特性,需要对其混沌状态进一步分析和研究。
近年来, 分数阶PMSM混沌系统同步控制被广泛研究。 文献[8]针对不确定参数分数阶PMSM系统同步控制, 提出了一种新分数阶控制方法,实现了初值不同参数不确定的两个分数阶PMSM系统的同步控制。 文献[9]研究了分数阶PMSM系统中混沌现象存在的条件,并通过设计控制器实现了分数阶PMSM系统的同步控制。 文献[10]利用分数阶滑模变结构控制方法,实现了两种不同PMSM系统的同步控制。 然而,目前对于柔性变结构控制策略的研究则较少。
笔者利用柔性变结构控制策略实现同步控制, 对两个分数阶PMSM混沌系统的稳定性进行理论分析, 最后通过常见的分数阶PMSM系统数值仿真进行验证。
1 问题描述
分数阶PMSM混沌系统如下[11]:

当系统初始状态为x(0)=[1,1,0.1]时,系统呈现出如图1所示的混沌现象。
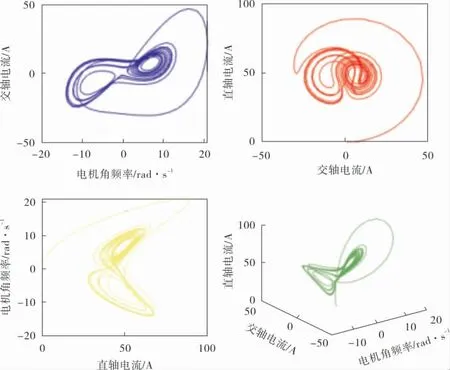
图1 分数阶PMSM系统初始状态下的混沌现象
对上述结构相同初值不同的分数阶PMSM混沌系统进行同步控制, 可将系统简化为如下形式:


2 同步控制器设计
为实现两初值不同系统的同步控制,采用分数阶Lyapunov理论,设计柔性变结构同步控制器。由式(3)得:

其 中,ui=H(p,e),H 为 光 滑 函 数 并 且 满 足Lipschitz条件,p=[p1,p2,p3]为控制器参数;aij为系统参数。 为了设计柔性控制器,采用分数阶微积分的方法确定选择参数pi,则选择参数pi连续变化时,控制器也会变化,避免出现抖振情况。 其中选择参数取:

定义1 在所设计控制器ui的作用下, 系统(4) 是Lyapunov稳定的。 即控制器实现两分数阶PMSM系统的实时跟踪。
证明 根据分数阶PMSM同步系统选取Lyapunov函数:

由分数阶Lyapunov稳定性理论判定该系统是渐近稳定的,证明从任意初始条件出发的误差系统(3)将稳定在平衡点。 所设计的控制器(6)实现了系统(2)与系统(1)状态变量之间的同步控制。
3 数值仿真
对三维分数阶PMSM混沌系统进行数值模拟仿真,以验证该方法对两永磁同步电机混沌系统同步控制的效果。
驱动系统为:

分数阶阶次q=0.98。 两系统的状态变量初始值x(0)=[1,1,0.1],y(0)=[0.01,0.01,0.01]。
如图2所示,当控制器u无输出时,系统状态误差在10 s内不收敛。

图2 无控制器作用时系统状态误差曲线
为使系统误差收敛并趋于稳定,加入柔性控制器ui=-kiei-piliei,选取k=[2,2,2]。
为体现柔性控制器反应迅速的优越性,先设置控制器中的l=[0,0,0],即控制器为:
得到当控制器为比例控制器时的系统状态误差曲线如图3所示, 可以看出此时误差曲线收敛速度较慢。

图3 比例控制器下系统状态误差曲线
为缩短两分数阶PMSM系统同步的时间,利用柔性变结构控制器(6)对该系统进行控制。 为简化仿真,选取l=[1,1,1],φ(p,e)=1,β=1,使选择参数pi在一定范围内。 通过数值仿真得出柔性控制器作用下系统误差曲线如图4所示, 选择参数pi如图5所示。从图4中可以看出,柔性变结构控制使得系统误差更快地收敛至平衡状态,具有更短的收敛时间。 图5中最初2 s需要控制器较大的调节能力, 此时选择参数较大;2 s后系统趋于稳定,控制器输出会干扰系统稳定,故选择参数逐渐衰减至0,从而具有更快的稳定时间。

图4 柔性控制器下状态误差曲线

图5 选择参数变化曲线
为进一步验证柔性控制器对系统误差的影响,仿真中对柔性变结构控制器的加入时间加以设定,在仿真开始2 s后加入控制器,结果如图6所示。可以看出,仿真的前2 s误差曲线不稳定、波动大,在2 s后加入柔性控制器后,系统状态误差逐渐趋于稳定,收敛速度较快。 仿真结果表明,两分数阶PMSM系统在任意初始条件下, 柔性变结构控制器使得同步误差状态渐近稳定,两系统状态变量实现了同步。
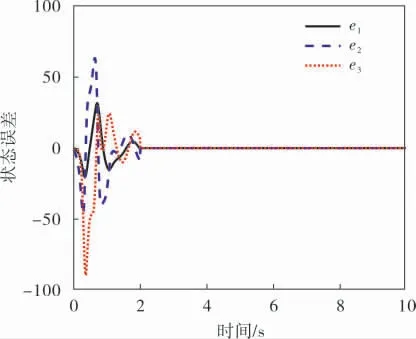
图6 2 s后加入柔性控制器后的误差曲线
4 结束语
笔者设计了一种柔性变结构控制器,实现了两不同初值分数阶PMSM混沌系统的同步控制。通过柔性变结构实现对两系统同步时间的改变,并通过分数阶稳定性理论判定了误差系统的稳定性。 控制器缩短了两分数阶PMSM系统状态变量的跟踪时间。Matlab仿真验证了在分数阶PMSM系统同步控制中, 该控制器缩短收敛时间的优点。
