小型类人足球机器人腿部结构优化设计
2022-12-12张菁王君燕必希张重阳胡馨元吴欣颖
张菁 王君 燕必希 张重阳 胡馨元 吴欣颖
(北京信息科技大学仪器科学与光电工程学院,北京,100192)
0 引言
近年来,足球机器人已成为科学技术领域具有标志性和挑战性的研究方向之一。“建造一支完全自主的类人机器人球队,并在本世纪中叶战胜人类世界杯冠军队伍”是以体育竞技为载体的RoboCup(Robot World Cup,机器人世界杯)的终极目标[1]。但是,高昂的构建成本使得直接在类人机器人上的技术研究难以开展,而构建小型化的平台则提供了一种解决方案[2]。
RoboCup 技术规范的最新版是2019 年版,该版要求小型类人足球机器人的身高范围在40cm~100cm 内[3]。受本体空间狭小及关节驱动能力有限等问题的影响,小型类人足球机器人的结构设计存在诸多难点。机器人腿部是身体的基础结构,更是执行相关步态指令时必不可少的结构,合理的腿部机械结构能够保证机器人的可靠性和灵活性。RoboCup 小型类人足球机器人组别的比赛已经开展了10 余年,比赛中涌现出了大量设计新颖的机器人样机平台,其中腿部6 自由度的结构方案被广泛采用。6 自由度的腿部结构能够使得腿部末端在机器人的工作区间中达到任意的位置和姿态[4],适用性较强。但是,6 自由度的腿部结构有多种自由度配置方案,不同方案的稳定性之间存在着较大差距,其中,YRP(yaw-roll -pitch,偏航—横滚—俯仰)型和RPY(roll-pitch-yaw,横滚—俯仰—偏航)型两种方案较为普遍。2007 年,法国Aldebaran Robotics 公司推出的NAO 机器人采用了腿部6 自由度YRP 型配置方案及特殊的45°耦合机构,成为了RoboCup 的标准平台。2009-2010 年,来自德国的RoboCup 参赛队伍Darmstadt Dribblers 采用了自主设计的机器人硬件,且机器人的腿部也采用了6 自由度YRP 型配置方案,具有较高的灵活性,使得该队伍连续两年均以大比分的优势夺得小型类人足球机器人组别的冠军。2016-2019 年,法国参赛队伍Rhoban 的机器人同样采用腿部6 自由度YRP 型配置方案,并且凭借高水平的机器人团队协作能力连续4 年夺得该组别的冠军。
本文通过分析本校机器人当前腿部结构存在的问题,结合仿生学理论和步态调试需求,将膝关节处的偏航驱动器上移至髋关节处,使机器人腿部原有的RPY 型自由度配置方案优化为YRP 型方案;同时设计了各关节间的连接零件,更改了膝关节俯仰驱动器的配置方向,从而不仅保证了新方案下各自由度的协调配合,而且使机器人的总高度基本不变,实现了机器人腿部空间设计合理性的提升、步态设计的简化、步态执行稳定性的提高、驱动器保护措施的改善等。
1 腿部结构优化设计
1.1 腿部自由度配置方案
对类人机器人的研究其实也是人类对自身的一种研究。人体的构造是经过长期自然发展形成的,具有能量最优、关节配置最优等众多的最优性[5]。美籍华人机器人学家郑元芳教授从仿生学的角度对类人机器人腿部的自由度配置进行了研究[4]:髋关节处和踝关节处应各设置2 个自由度,使机器人可以在直立和行走时保持平衡;膝关节处应设置1 个自由度,达到调节摆动腿的着地高度和机器人重心高度的目的。此外,髋关节处应再增加1个偏航自由度以实现机器人的转向。
目前,本校小型类人足球机器人腿部自由度配置采用RPY 型方案,如图1(a)所示。该方案中腿部的偏航驱动器位于膝关节处,不仅使膝关节臃肿笨重,影响机器人的灵活性[6],而且存在步态调试复杂、稳定性较差等问题。此外,该方案中的膝关节俯仰驱动器处于横向配置的状态,导致膝关节在机器人摔倒时所受到的冲击较大,加速了舵机的磨损与老化,同时也存在着一定的安全风险。
综合考虑郑元芳教授的仿生学理论[4]、机器人当前腿部结构存在的问题以及步态调试的需求,本文将机器人腿部自由度的配置方案优化为YRP 型方案,如图1(b)所示。两种方案中各关节的自由度配置数量如表1 所示。

表1 两种方案中各关节的自由度分配表
机器人各自由度之间的连接形式分为串行连接和并行连接。其中,串行连接具有体积小、运动空间大的特点,可用于腿部膝关节处;并行连接虽然空间体积较大,但运动灵活、承载力也较大,可用于腿部髋关节和踝关节处。在确定机器人腿部的自由度配置方案及连接形式后,即可绘制出如图2 所示的自由度结构分布示意图[7]。
1.2 腿部结构设计
本文设计的机器人腿部各关节驱动器选用韩国Robotis公司生产的数字舵机MX 系列。根据YRP 型自由度配置方案,笔者构造出腿部关节的自由度模型,如图3(a)所示;结合舵机的结构和尺寸,并考虑零件板材的加工工艺[8],设计出各关节处驱动舵机之间的连接零件,如图3(b)所示;在SolidWorks软件中将设计好的各个零件与舵机进行装配,并将横向配置的膝关节俯仰驱动器更改为纵向配置,得到机器人腿部结构的三维模型,如图3(c)所示。
1.3 样机整体组装
将设计好的机器人腿部与其他结构连接,组装机器人的整体结构如图4 所示。同时,提取出结构优化后的关键尺寸数据,以便进行后续的结构合理性验证等相关研究。各关键尺寸的数据及其经结构优化前后的差值如表2 所示,其中,Hthigh为机器人大腿长度、Hshank为小腿长度、Hleg为整体腿长、Htop为身高、HCOM为重心高度。
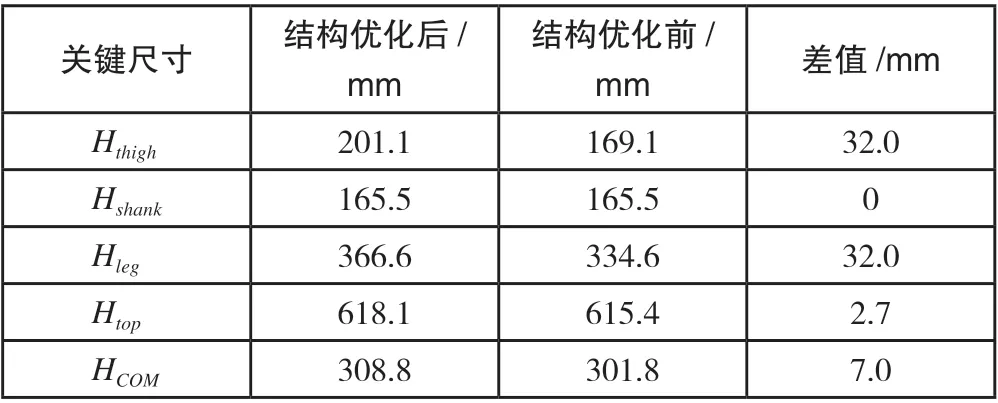
表2 机器人各关键尺寸的数据及差值
由表2 可知,结构优化后的机器人大腿长度增加了32.0mm,小腿长度不变,导致整体腿长增加了32.0mm。由于原结构中髋关节与胸腔之间的空间被合理缩小,机器人身高基本不变,仅增加了2.7mm。机器人重心高度也未发生太大变化,仅上升了7.0mm。计算并比较结构优化所更改的10 个连接零件的质量可知,机器人的总质量减少了85.7g。综上所述,经结构优化后,机器人的腿长、身高和重心高度稍略有增加,总质量略有减少。
1.4 结构优化规范性分析
机器人结构优化涉及到RoboCup 最新版技术规范[3]的相关要求如下:
计算出结构优化后变更的相关参数,并与RoboCup最新版技术规范的对应要求进行比较验证,如表3 所示。
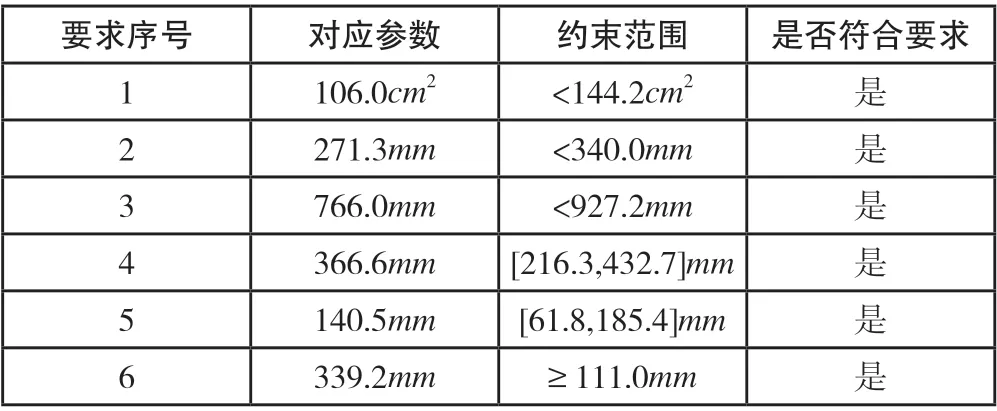
表3 机器人变更的参数及验证
由表3 可知,机器人结构优化后变更的相关参数均符合RoboCup 最新版技术规范的对应要求。
1.5 整机组装
机器人优化后的结构通过合理性验证后,笔者在SolidWorks 软件中将三维设计模型转为可用于切割加工的二维图纸。接下来根据图纸完成10 个连接零件的加工制作,具体包括侧摆支架2 个、大腿内侧板2 个、大腿外侧板2 个、髋关节前支架2 个和髋关节前支架板2 个,加工后的连接零件如图5 所示。
用加工后的连接零件取代原结构下对应位置的零件,根据结构优化后的自由度配置方案进行组装,得到优化后的机器人样机如图6 所示。
2 步态调试实验
对结构优化后的机器人进行步态调试的验证实验,首先编辑出该机器人的步态文件,包括直立行走、左脚踢球、右脚踢球等。部分步态执行情况如图7、图8 所示。
通过理论分析可知,该结构优化方案并未更改髋关节处3 个旋转轴轴线相交于一点的特征,保持了腿部自由度总数不变,同时也并未改变逆运动学的求解难度[9]。笔者通过将髋关节与胸腔之间的空间由35.5mm 合理缩小为7.5mm,确保机器人身高基本不变,仅增加了2.7mm;通过将膝关节横向配置的俯仰驱动器更改为纵向配置,使膝关节的宽度由79.0mm 合理缩小为40.2mm,减小了膝关节在机器人摔倒时所受到的冲击,改善了驱动器的保护措施。另外,通过将膝关节处的偏航驱动器上移至髋关节处,有效提升了腿部空间设计的合理性以及机器人的仿生设计程度。
在步态调试的实验过程中,结构优化后的机器人能够稳定、流畅地执行参加RoboCup 小型类人足球机器人组别比赛的所需步态。在执行直立行走步态时,机器人起步瞬间的作用力明显减小,有效缓解了因驱动器瞬时负载过大而导致的机器人失稳现象。机器人行走时的抬腿高度明显减小,从而使行走时的动作幅度有所减小,稳定性有所提高,增强了机器人行走时躯干保持直立的程度,减少了行走时因身体大幅晃动以致摔倒的次数,延长了机器人的工作寿命。此外,机器人在每个行走周期内的步态帧数由35 帧减少至28 帧,行走步频有明显的提高,从而实现了高步频下的稳定、快速行走,同时也验证了该结构优化方案的可行性和正确性。
3 结语
本文为符合RoboCup 技术规范的小型类人足球机器人的腿部结构提供了一种新的优化设计方案,通过将腿部RPY 型6 自由度配置方案优化为YRP 型方案,重新设计各关节间的连接零件,将横向配置的膝关节俯仰驱动器更改为纵向配置并改装样机的整体结构,强化了类人足球机器人腿部的仿生设计程度,改善了驱动器的保护措施。在保持逆运动学求解难度不变的前提下,有效提升了腿部空间设计的合理性,具有提高腿部空间设计合理性、简化步态设计、提高稳定性等重要作用。
不过,在设计大腿与小腿间的连接零件时,为了保证机器人身高的基本不变而“牺牲”了一定的大腿后摆空间。目前,该结构下机器人大腿后摆的最大角度约为43°32′,虽然仍能满足步态设计需求,但是会影响机器人的远距离踢球能力。后续的研究工作将对该部分的零件进行进一步的改进,以满足机器人远距离踢球的需求。