用于电动自行车的开关磁阻电机设计与优化*
2022-12-10梁永洲肖发远段锦锋黄朝志
梁永洲, 肖发远, 段锦锋, 谢 威, 黄朝志
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
随着能源危机和环境污染问题日益严峻,绿色出行的概念深入人心,电动自行车正在从传统自行车和汽车中获得越来越大的市场份额,研发稳定可靠且性价比高的电机及电机系统对促进电动自行车行业的发展具有深远意义[1~3]。开关磁阻电机(switched reluctance motor,SRM)具有过载能力强、启动转矩大、容错性强等特点,故在电动自行车领域具有巨大潜力,但SRM也有转矩脉动大、功率密度低等缺点[4,5]。
文献[6]通过设计6/8极外转子SRM与传统的8/6极SRM比较和实验测试,表明外转子SRM具有更高的转矩/体积比,电磁性能优于传统电机。文献[7]设计出一种12/16极直驱式电动自行车用开关磁阻电机,指出在考虑到高功率因素、高转矩输出、低转矩脉动时,必须考虑定、转子极弧角和极高之间的相互影响。通过实验发现,电机的磁共
能随着转子级数的增加而减小,虽然电机的平均转矩降低,但转矩脉动得到优化。文献[8]采用实验设计(design of experiment,DOE)和差分进化(differential evolution,DE)相结合的优化算法来优化转矩脉动和目标转矩,缩小搜索空间,节约计算时间。
电机输出转矩和脉动受电机尺寸和结构影响较大,文献[9]通过在SRM定子齿弧面开槽和添加极靴的方式有效地减小了SRM的振动和噪声;文献[10]设计了12/16极外转子SRM;文献[11]提出了定子极多齿拓扑概念,该拓扑结构具有较高的转矩密度;文献[12, 13]提出一种6/10外转子SRM结构,与传统SRM相比,在低速环境下,转子极数的增加会有效降低转矩脉动,从而使电机运行更加稳定。
本文以外转子SRM为研究对象,先确定新电机结构;其次,选取4个变量作为优化参数,通过响应面法对优化目标进行回归建模,在保证拟合精度的基础上,采用引入Pareto解集的多目标鱼群算法对参数进行优化,通过全局寻优得到非支配解集,为解决实际工程问题提供一个有效的优化方案。
1 初始设计与电磁原理
1.1 电机拓扑结构
依据新国标电动自行车设计要求,设电机额定功率为340 W,额定电压48 V,额定转速350 r/min。因需要将研制的SRM用于电动自行车上,故采用外转子驱动方式。与传统外转子SRM形成的磁通回路不同,本文提出的电机拓扑结构,每个定子极有2个齿形成磁通回路,如图1(b)所示。图1(a)为传统结构的磁通回路和磁通分布。

图1 传统与新型拓扑结构的磁通分布
1.2 极弧角和转子极数的设计
图2为新电机结构模型,俩齿拓扑结构的角度方程可以表示为
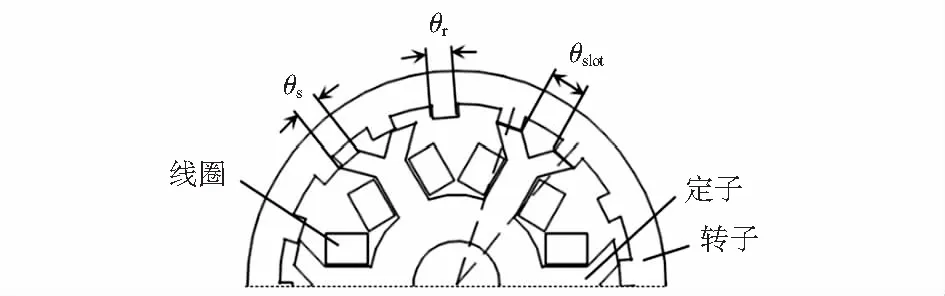
图2 新电机结构模型
(1)
式中 60°为定子极矩弧角度,120°/Nr为换向角,θslot为定子内槽弧角度,θs为定子极弧角,Nr为转子极数。为了使转子极数大于定子齿数,k设为3。故定子内槽弧角度与定子极弧角度之和为22.5°,转子极数为16,换向角为7.5°。
1.3 新电机结构工作原理
为建立新型SRM的瞬时转矩数学模型,将运行系统看成是一个无损系统。利用等效磁路(equivalent magnetic circuit,EMC)法验证该拓扑结构的优势。SRM的瞬时转矩为
Te=∂Wm/∂θ
(2)
设置转子开槽中心线与定子齿中心线对齐位置角为零,转子位置角可表示为
θ=π/Nr+la/rs-θr/2-θs/2
(3)
式中Nr为转子极数,rs为内定子的外半径,la为定、转子齿重叠部分弧长,θs,θr为定、转子极弧角。则磁共能为
(4)
由于R0≫Rs+Rr
(5)
式中I和N为相电流和相线圈匝数,R0,Rs,Rr分别为气隙磁阻和定、转子磁阻。由于磁通密度存在边缘效应,定、转子重叠区域可认为扩大了2个气隙长度。故气隙磁阻为
(6)
式中m为定子极齿数,lstk为电机长度,l0为气隙长度。则瞬时转矩为
(7)
由式(7)可知,当定子极齿数增大,瞬时转矩也会增大;但当继续增加定子极齿数,对应的转子极齿数也会增加,换向角变小,会产生更多的损耗,故取m=2。
2 电机优化设计
2.1 初始尺寸参数
依据传统6/8外转子设计经验,新的6/16电机模型原始尺寸如表1所示。

表1 初始6/16电机主要参数
2.2 单变量参数分析
根据经验取4个参数变量进行有限元分析,通过仿真观察转子齿高hr,转子极弧角θr,定子极弧角θs,定子齿高hs的变化对电机平均转矩Te,转矩脉动kT和效率η的影响。
如图3所示,可以清晰观察到各变量参数单独变化下电机性能的变化趋势。图3(a)和图3(c)中,随着定、转子极弧增大,磁通量增加,转矩上升,且两相间的低电感区间减小,转矩脉动降低;继续增大定转子极弧,磁通量已饱和,两相间互感增加,导致转矩降低,转矩脉动受互感影响而波动;图3(b)和图3(d)中,定、转子极弧效率跟转矩呈正比。
图3(e)中,随着转子齿高增加,凸极率增加,平均转矩上升,到达8.5 mm后,对应的转子轭厚减小,导致磁通量下降,平均转矩减小,转矩脉动增加。图3(g)和图3(h)中,随着定子齿高的增加,总磁路增加,能量转换能力降低,平均转矩和效率均降低;由于定子齿高的变化幅度较小,故转矩脉动的变化幅度在0.01以内。

图3 单变量变化对电机性能影响
2.3 响应面法建立模型
为进行多变量优化,本文采用中心复合设计(central composite design,CCD)方法[14]对上述4个变量进行5水平采样,如表2所示。

表2 因素与水平对照
使用有限元分析软件对不同水平下的参数组合进行仿真分析,进而得到平均转矩Te,转矩脉动kT和效率η的响应面模型表达式
(8)
式中x1,x2,x3,x4分别为定子极弧、转子极弧、转子齿高、定子齿高。电机优化响应面模型回归分析如表3所示。

表3 响应面模型回归分析
P值(model Prob大于F)均小于0.000 1,说明响应面模型显著,拟合度好;多元相关系数R2和校正系数Adj-R均大于0.88,表明响应面模型的预测准确度高,模型具有指导意义;信噪比Adeq-Precision大于4,模型具有较高的可信度;失拟项的P值均大于0.05,表明失拟项对模型的影响不显著,所得方程在实际拟合中非正常误差所占的比例小。
2.4 多目标鱼群优化算法
2.4.1 基本原理
人工鱼群算法通过模拟鱼类的觅食、聚群、追尾等行为在搜索域中寻找最优值[15]。改进的算法主要步骤如下:
1)觅食行为:设目标人工鱼当前位置为Xi,在其视野范围内选择任意位置Xj表示为
Xj=Xi+(2·rand(Xi)-1)·visual
(9)
若Xj处的食物浓度优于Xi,则
(10)
式中Xnext为人工鱼迭代位置;rand(1)为0~1的随机数。若直到最大尝试次数仍不满足,则执行

(11)
式中Xb为当前状态下鱼群中的最优位置。
2)聚群行为:设目标人工鱼当前位置为Xi,求取视野范围内人工鱼的中心位置Xc可表示为
(12)
式中dk为Xi与其他人工鱼之间的距离;b为Xi视野范围内人工鱼的集合;Xj为视野围内其他人工鱼的具体位置;Nb为视野范围内人工鱼个数。若满足fXc(Te,1/kT,η)>fXi(Te,1/kT,η),则执行式(10)(仅将Xj替换为Xc),此处为提高算法寻优精度,忽略拥挤度;否则执行觅食行为。
3)追尾行为:设目标人工鱼当前位置为Xi,筛选出视野范围内非支配人工鱼群位置,选择其中拥挤度最大的人工鱼Xm作为前进方向,若存在
(13)
式中D(Xm),D(Xi)分别为Xm和Xi位置的拥挤度,delta为设定的拥挤度因子。若满足上式则执行式(10)(仅将Xj替换为Xm),否则,执行觅食行为。
4)拥挤度计算:电机的平均转矩为重要参数,故平均转矩、转矩脉动和效率的拥挤度权重因子λs分别为:1.2,1,1,个体Xi拥挤度Di可表示为
(14)
式中m为目标函数个数。
5)最优位置选取:与一般仅考虑前后代最优位置比较选取不同,本文设置在全局范围内寻找非支配解中拥挤度最大的作为最优位置。即每次迭代后的种群会与之前得到的非支配种群汇聚成一个新种群,并在新种群中筛选出新的非支配种群,再从中找出拥挤度最大的人工鱼作为最优位置。
2.4.2 模型求解
依据响应面法得到的模型求解多目标优化问题为
minf(kT),maxf(Te),f(η)
(15)
各变量与式(8)对应,算法初始化中设置迭代次数为50代,种群为数60,最多试探次数为50次,拥挤度因子为1,步长为0.65,可视距离为2。
图4为第50次迭代后的种群分布和非支配人工鱼的分布情况,可看出鱼群已经收敛。转矩、转矩脉动和效率集中分布在9~9.5 N·m,0.5~0.8,0.915~0.925,说明改进后的算法收敛效果良好。从图5中可看出,鱼群的最优位置主要分布于3个区域,结合第50次最优人工鱼位置为(8.996 1,0.527 2,0.918 2),可知最优位置在中间区域,其余两区域为局部极值区域,表明改进后的算法对跳出局部极值区域有良好的效果。图6为50次种群迭代得到的240组全局非支配的人工鱼位置,若不设置拥挤度权重因子,则最优位置在(9.95,1.06,0.927)附近。另外,结合图4~图6可得出转矩脉动与转矩、效率成制约关系,转矩与效率整体呈正相关趋势。

图4 Pareto前沿 图5 最优位置迭代 图6 全局非支配解
3 优化分析
图4所示Pareto可行解区域内选取4组优化方案来验证响应面方程模型的有效性。优化结果与分析如表4~表6。
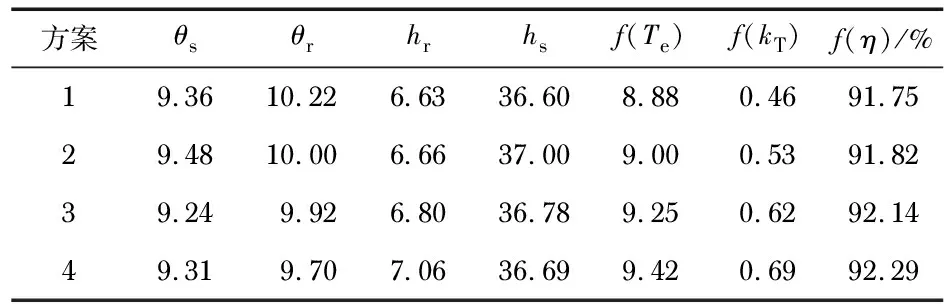
表4 基于多目标鱼群算法的优化结果

表5 有限元分析优化结果

表6 误差分析 %
表4列出了4组优化后的参数组合和优化解,其中,方案2为算法中最优人工鱼位置;表5为有限元分析后的优化解。通过表6的误差分析可以看出响应面模型中平均转矩和效率的误差在1.5 %以内,优化的精确度较高;转矩脉动的误差较大,但其转矩脉动实际差值均小于0.1,在可接受范围内。
算法改进后得到的4组参数组合的平均转矩均满足输出功率的设计要求,方案2的转矩脉动最低,在效率相差很小的情况下,方案2为优先选择项。
图7为算法改进前后最优位置转矩变化情况,改进后的转矩脉动较改进前降低39.08 %,平均转矩降低11.56 %,效率降低0.49 %。由于算法改进前后的输出转矩均达到设计要求,此时转矩脉动为首要考虑因素,改进后低转矩脉动更受青睐。若迭代后的最优位置没达到预期目标,也可通过Pareto解集筛选出符合设计目标的参数组合。
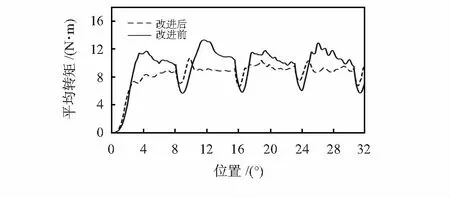
图7 算法改进前后最优位置比较
4 结 论
本文依据电动自行车新国标要求设计了一种新型外转子SRM拓扑结构,并通过理论分析验证该结构具有更大的瞬时转矩输出。然后选取4个结构参数作为设计变量,利用响应面法对转矩、转矩脉动和效率进行数学建模。通过改进的多目标鱼群算法寻找Pareto解集,用有限元法对优化后的参数进行仿真与误差分析,验证了算法的有效性,为后续验证提供了研究基础。
