改进型IF控制结合有效磁链法的永磁同步电机全速域无位置传感器控制策略
2022-12-03付康壮刘计龙麦志勤牧雅璐李科峰
付康壮 刘计龙 麦志勤 牧雅璐 李科峰
改进型IF控制结合有效磁链法的永磁同步电机全速域无位置传感器控制策略
付康壮 刘计龙 麦志勤 牧雅璐 李科峰
(海军工程大学舰船综合电力技术国防科技重点实验室 武汉 430033)

永磁同步电机 无位置传感器控制 改进型IF控制 有效磁链法 全速域
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有体积小、功率密度高、调速范围广等优点,在航空航天、舰船推动、新能源汽车等领域得到了广泛应用[1-4]。实现PMSM高精度矢量控制需要实时获取转子位置信息,传统的检测方式是在电机内部安装机械式传感器,这种方式会造成系统鲁棒性降低、安装和维护成本增加、线路连接复杂等诸多问题,严重影响PMSM的推广应用[5-7]。为拓宽PMSM的适用范围,无位置传感器控制技术逐渐成为众多学者研究的热点。
在PMSM中高速区采用基于电机基波模型的控制方法来实现转子位置辨识[8-11],但在零速或者低速区电机反电动势极其微弱,导致基于基波模型的转子位置辨识方法失效。为了实现PMSM全速域无位置传感器控制,必须要在低速区设计单独的控制策略,目前常用的零低速区控制方法是高频信号注入法[12-16]。高频信号注入法是通过向电机注入连续的高频电压(电流)信号实现转子位置辨识,在电机的零低速区具有较高的位置估计精度,但其工作时会产生额外的系统损耗和电磁噪声,并且需要多个滤波器进行滤波,计算量大且实现过程复杂,在一些有特殊要求的场合并不适用,如潜艇、水下自主航行器等。
IF控制(IF control)又称为电流频率比控制,是一种采用电流、频率给定的控制方式,与高频信号注入法相比,其实现过程简单,工作时不产生附加振动噪声,而且适配电机广泛,既适用于隐极电机也适用于凸极电机,是常用的PMSM零低速区无位置传感器控制方法之一。IF控制不依赖于转子位置信息且引入电流闭环控制,可有效避免电机过电流,同时具备一定的抗负载扰动能力,在如今的工业控制中已经应用得较为成熟,常被用于电机起动加速过程[17-19]。
经过调研发现,目前依然没有单一的且性能良好的无位置传感器控制策略能够同时兼顾PMSM零低速区和中高速区的控制,而实现全转速区域无位置传感器控制是该项技术服务于工程实践的现实需求。因此,开展无位置传感器高低速复合控制策略的研究具有重要的工程应用价值。为提升控制系统的可靠性和适用范围,一些学者将IF控制与中高速区观测器法相结合,避免了采用高频信号注入法带来的电磁噪声和结构复杂等问题[16-18]。
文献[20-21]提出一种IF控制与滑模观测器相结合的PMSM无位置传感器复合控制策略,实现了电机的正(反)转起动加速至额定转速过程。文献[22]采用IF控制与磁链观测器法相结合的控制方法,并提出一种基于双dq空间的起动、切换策略,实现了IF控制向磁链估计法的无缝平滑切换。文献[23]提出一种IF控制与改进型带补偿校正的反电动势法相结合的复合控制策略,解决了船舶推进PMSM在无位置传感器控制下,无法实现从起动平滑加速至全速的问题。文献[24]采用IF控制与反电动势估计法相结合的控制方案应用在滚筒洗衣机的驱动控制系统中。
1 零低速区IF控制
1.1 IF控制系统结构与基本原理
IF控制是一种转速开环、电流闭环的PMSM无位置传感器控制方法,具有实现简单、控制方便等优点,且在低速区具有一定的抗负载扰动能力,是实现PMSM零低速区无位置传感器控制的重要手段之一。因此,本文在电机零低速区采用IF控制,传统IF控制的系统结构如图1所示。

图1 传统IF控制的系统结构


在SPMSM中d=q,式(3)可近似简化为

PMSM的转矩平衡方程表达式为
式中,L为真实同步坐标系和虚拟同步坐标系之间的相位差;d、q分别为直轴电感和交轴电感;e为电磁转矩;L为负载转矩;n为电机的极对数;f为永磁体磁链;为电机的转动惯量。
IF控制可以直接控制定子绕组的电流幅值,使得电机具有较好的负载转矩匹配能力。根据IF控制的“转矩-功角自平衡”原理可知,当负载发生扰动时,通过功角的变化,电机会建立新的转矩平衡,使其具备较强的抗负载扰动能力。
1.2 传统IF控制的局限性分析
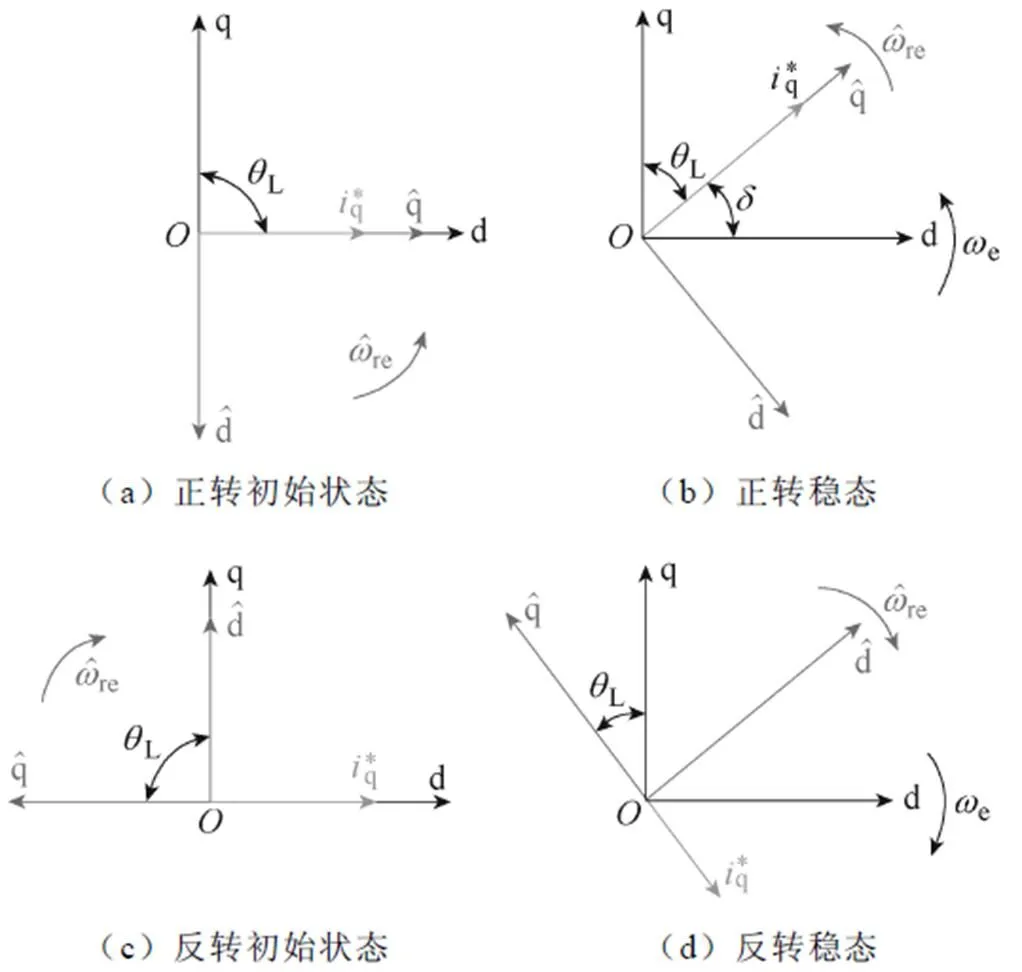
图2 传统基于轴电流给定的坐标系相位关系

表1 传统IF控制零速穿越工况的实现过程

1.3 基于轴电流给定方式的改进型IF控制

此时,电机的电磁转矩方程为


图3 改进型IF控制下两种坐标系的相位关系
1)正转起动至额定转速过程
2)正转降速至零速过程
3)反转起动至额定转速过程
4)反转降速至零速过程

表2 改进型IF控制零速穿越工况实现过程
2 全转速范围无位置传感器控制策略
在中高速区工况下电机端口信号明显,通常采用基于电机基波模型的无位置传感器控制方法来实现转子位置辨识,其中包括滑模观测器法、磁链估计法、模型参考自适应法、卡尔曼滤波法等。与高速区其他控制算法相比,有效磁链法实现简单、位置估计精度高,其研究也相对成熟,能同时适用于隐极电机和凸极电机,在工程中已经得到广泛应用[9-10]。
本文在中高速区采用有效磁链法进行转子位置辨识。在上述研究的基础上,本文可以较好地实现在无位置传感器条件下,PMSM在零低速区、中高速区的可靠运行,改进型IF控制结合有效磁链法的全速域无位置传感器控制框图如图4所示。从低速区IF控制到转速、电流双闭环控制需要经历一个过渡过程,通过设置合理的过渡过程实现两种控制策略的平滑切换是PMSM无位置传感器控制的重要研究内容之一。本节重点针对改进型IF控制与有效磁链法之间的平滑切换策略展开研究。

图4 全速域无位置传感器控制框图
2.1 转速区间的划分
反转情况),设置60r/min和100r/min为不同转速区间的切换点,将电机转速分为零低速区、过渡区和中高速区3个区间。表3为电机转速区间的具体划分情况。

表3 转速区域划分
2.2 状态机的滞环切换方案
本文利用状态机实现电机转速区间的切换,为防止系统在不同转速区间频繁切换,在切换时采用了滞环切换。根据工程经验,通常将滞环环宽设置为全速域宽度的1%左右,本文电机的转速范围为-500~500r/min,因此,滞环宽度设置为10r/min。基于状态机的滞环切换实现原理如图5所示。

图5 状态机的滞环切换实现原理
以电机正转为例,在电机正转加速和正转减速工况下,对状态机的切换方式进行介绍。
2.3 转速过渡区的轴电流储备方案

图6 基于过渡区的轴电流储备方案示意图
(1)控制策略切换。电机从零低速加速至额定转速过程,控制方式由IF控制切换到有效磁链法(策略在切换点A处完成切换),该过程采用的切换方式是“双dq空间切换”。PMSM的任一空间矢量都可以在双dq空间中表现出不同的分量,各分量的关系可以由两个坐标系之间的相位差L唯一确定,双dq空间切换示意图如图7所示。

图7 双dq空间切换示意图

(2)控制策略切换。电机从额定转速降速至零低速过程,其控制方式由有效磁链法切换到改进型IF控制(在策略切换点B处完成切换),该过程采用的切换方式是“直接切换法”,原因分析如下:根据IF控制的特性可知,IF控制所需要的位置给定信号可以直接给定。在有效磁链法向IF控制切换时,由于有效磁链法全程工作,切换瞬间电机转子位置和dq轴电流已知,因此在有效磁链法向IF控制切换时,将磁链法所估计的位置信息直接用于IF控制给定,可以保持电机的电压矢量和电流矢量不变,从而顺利实现切换过程。因此,采用基于IF控制参数给定的直接切换策略,可以有效降低磁链法向IF控制切换的复杂度。
3 实验结果与分析
为了进一步验证本文所提方法的可行性,搭建如图8所示实验平台对其进行验证,直流母线电压为500V,负载为一台发电机。被试电机由变频器供电并拖动发电机产生电能,发电机电能消耗在负载电阻柜上。在数据采集存储方面,首先将DSP内部的转子位置、转子转速等数据信息实时保存在RAM中,停机之后再将数据导出,然后利用Matlab完成数据处理并绘图。实验所用的永磁同步电机参数见表4。
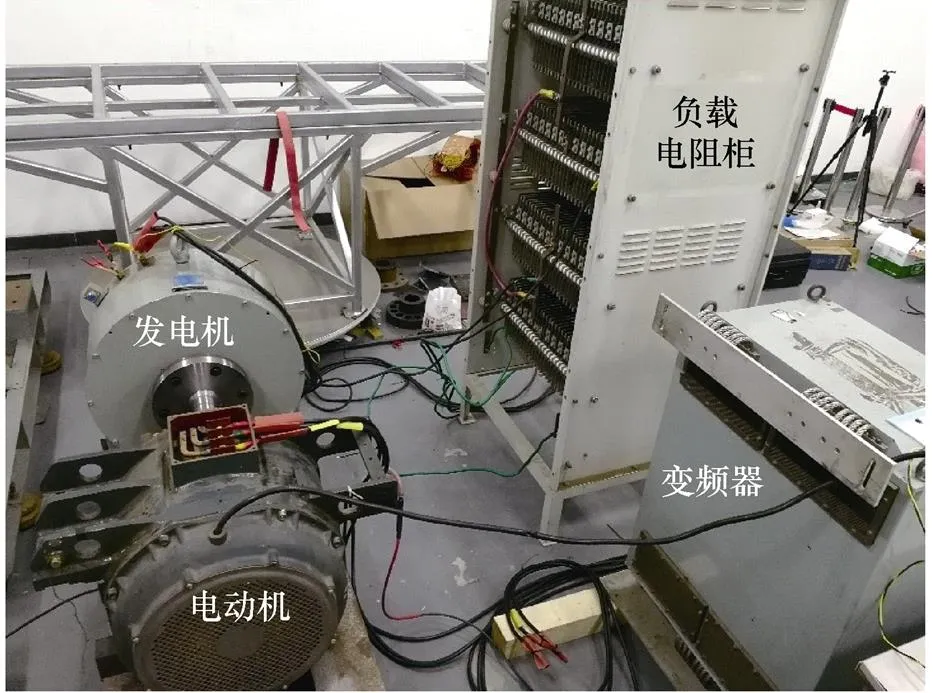
图8 实验平台

表4 永磁同步电机参数
3.1 IF控制与有效磁链法稳态工况性能验证

图9 控制模式50r/min稳态工况下的转子转速和三相电流实验波形
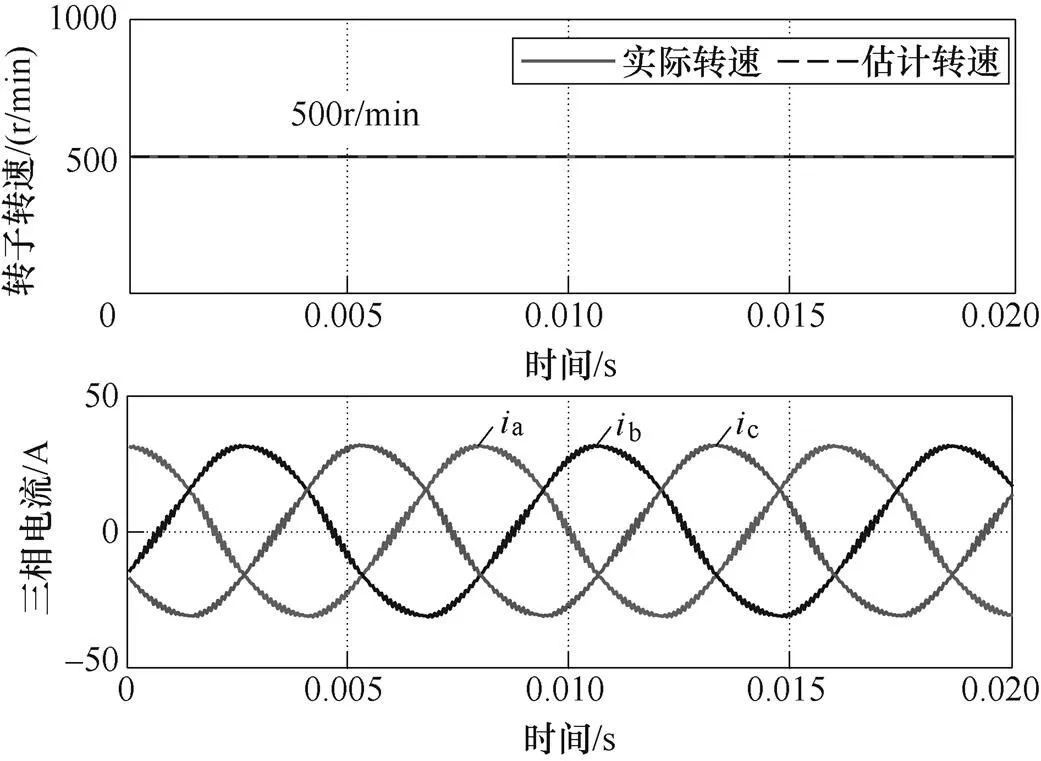
图10 有效磁链法控制模式500r/min稳态工况下的转子转速和三相电流实验结果
图9为在50r/min稳态工况下,电机采用改进型IF控制时的转子转速和三相电流实验波形。由图9可以看出,电机三相电流波形无明显波动且接近标准正弦,说明IF控制在低速区具有较好的控制性能,可以满足PMSM在零低速区的控制要求。
图10为在500r/min稳态工况下,采用有效磁链法控制方式估计的电机转子转速和三相电流实验波形。从图10可以看出,PMSM在500r/min稳态工况下运行时,有效磁链法估计的转子转速波形与旋转变压器所检测的实际转速波形拟合程度较好,未发生明显波动,三相电流波形具有较好的正弦度,电机平稳运行。实验结果表明,有效磁链法可以实现PMSM在中高速区运行时转子转速的精确估计。
3.2 改进型IF控制零速穿越性能验证
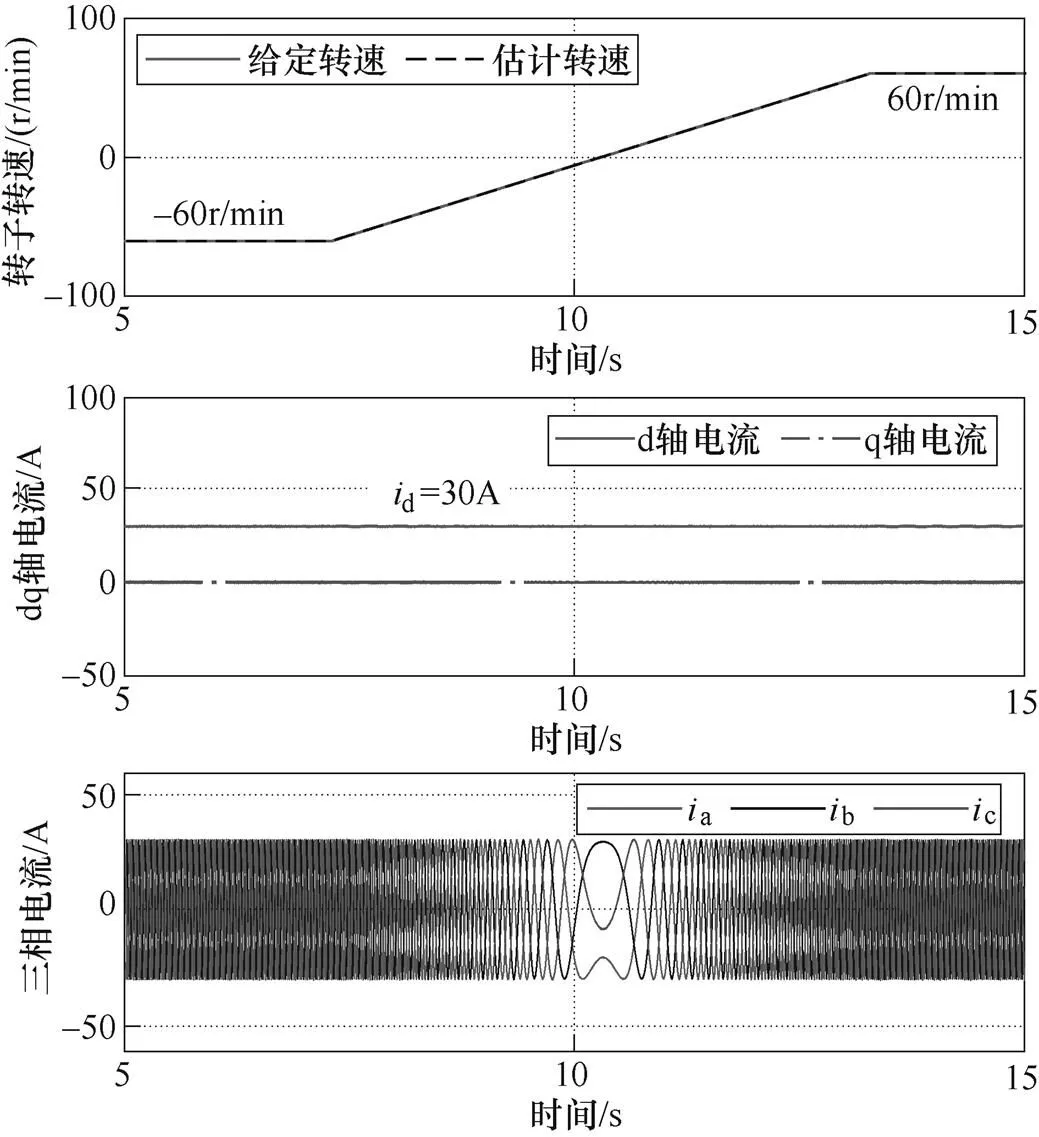
图11 电机由-60r/min加速到60r/min工况下IF控制零速穿越性能验证
图11为PMSM转速由-60r/min加速到60r/min工况下的dq轴电流、转子转速和三相电流实验波形。由图11可以看出,采用改进型IF控制时,在转速过零瞬间转速未发生波动,dq轴电流和三相电流也未产生明显波动,电机由正转切换到反转过程连续且平滑。
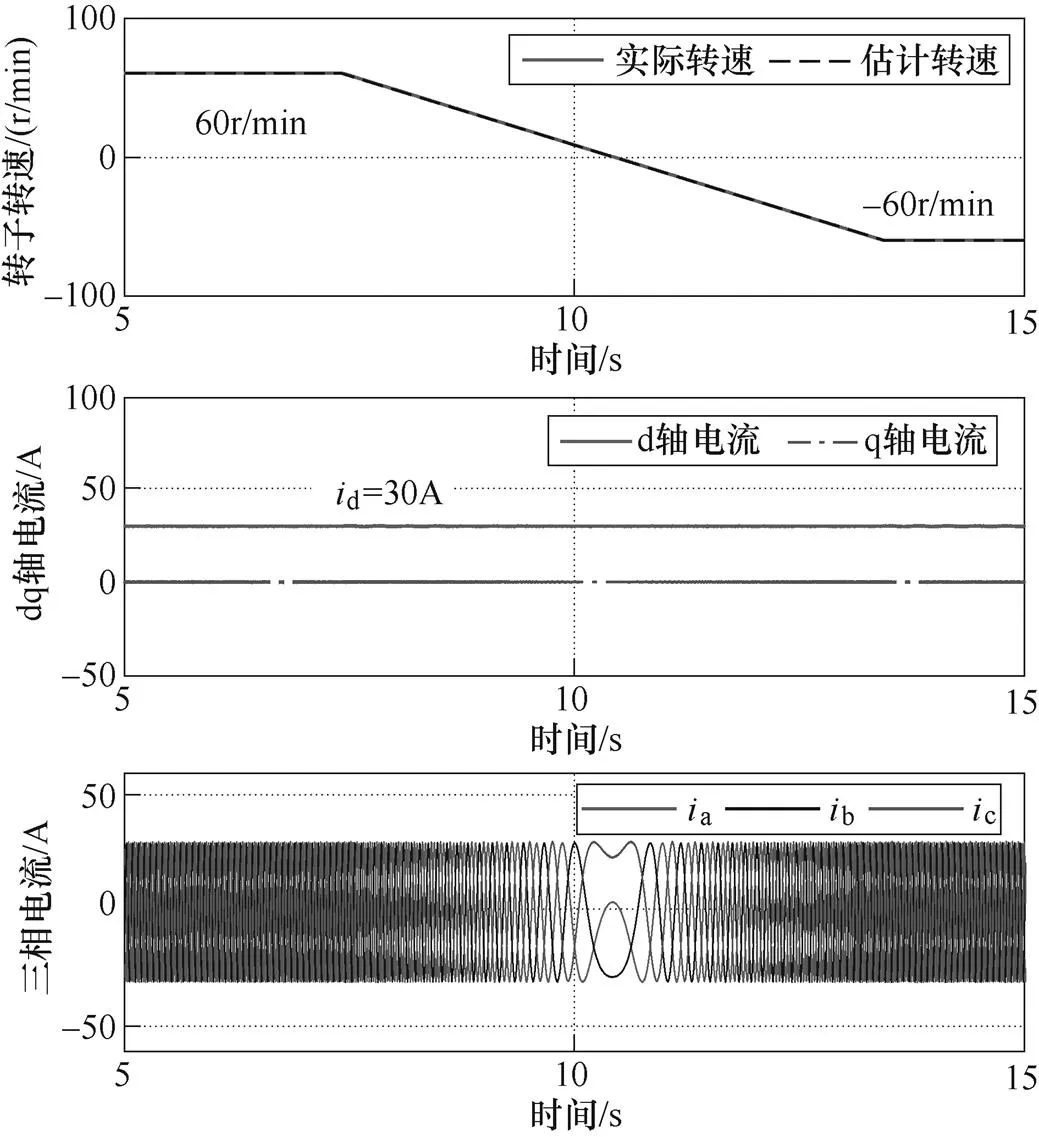
图12 电机由60r/min加速到-60r/min工况下IF控制零速穿越性能验证
图12为PMSM在60r/min加速到-60r/min工况下的dq轴电流、转子转速和三相电流波形。由图12可知,在电机零速穿越过程中,dq轴电流和三相电流均未产生波动,电机正反转切换过程平滑,且起动过程平稳。
3.3 切换策略性能验证
PMSM加速阶段采用的切换方式为双dq空间切换(IF控制-有效磁链法),减速阶段采用的切换方式为直接切换法(有效磁链法-IF控制)。本节对两种控制方式之间的切换策略的切换性能进行验证,实验结果如图13和图14所示。

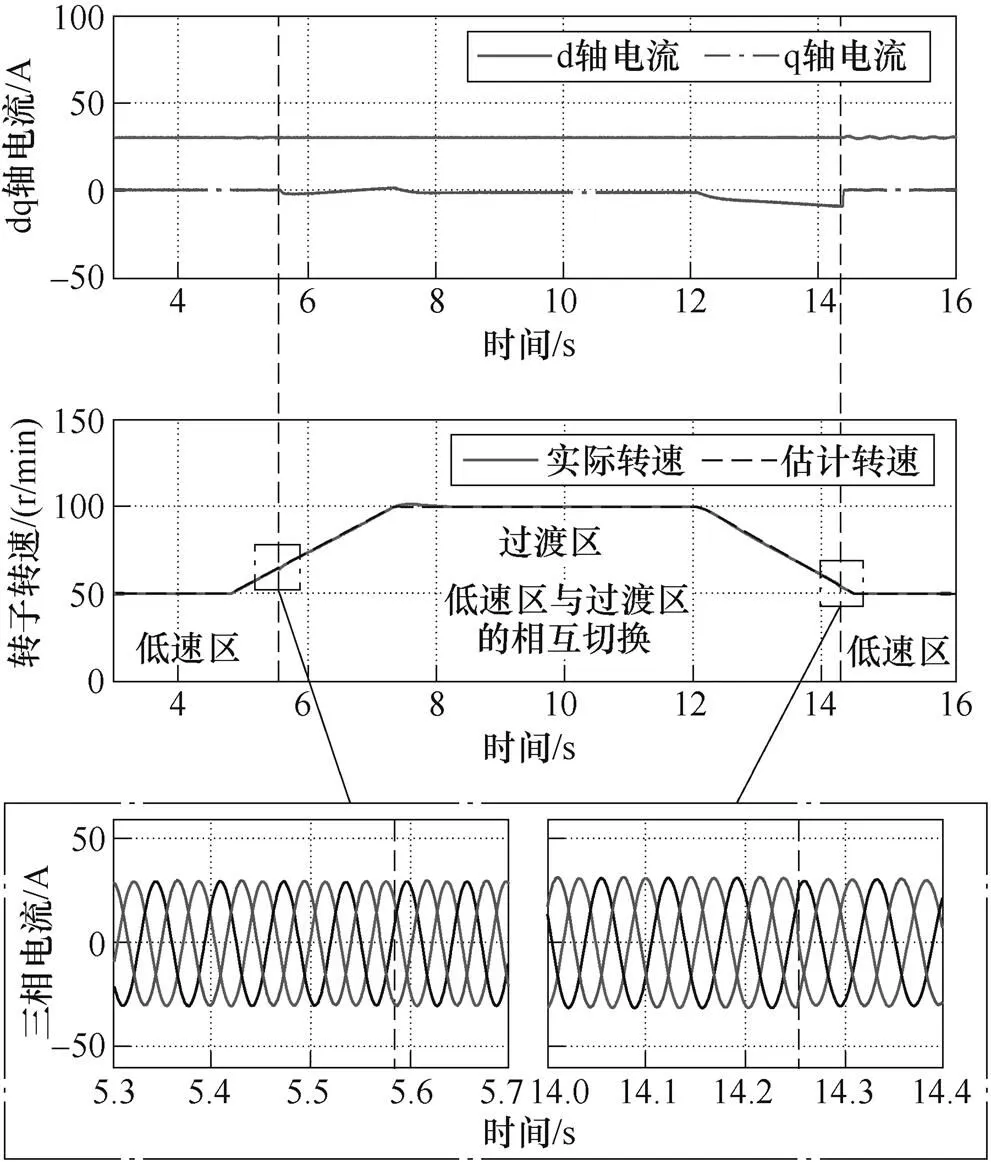
图13 电机正转工况下两种控制方法切换策略性能验证

图14 电机反转工况两种控制方法切换策略性能验证
由此可以看出,本文采用的切换策略在进行切换过程中电机运行稳定,转子转速和三相电流均未发生明显波动,可以有效实现IF控制与有效磁链法之间的灵活、平滑切换。
3.4 全转速范围无位置传感器控制性能验证
图15和图16为在PMSM全转速范围对所提无位置传感器复合控制策略性能验证的实验结果。图15给出电机在-500r/min到500r/min工况下的dq轴电流、转子转速和状态机状态实验波形。以电机正转工况为例,通过观察图15可知,PMSM由0r/min加速至500r/min过程系统工作状态如下:
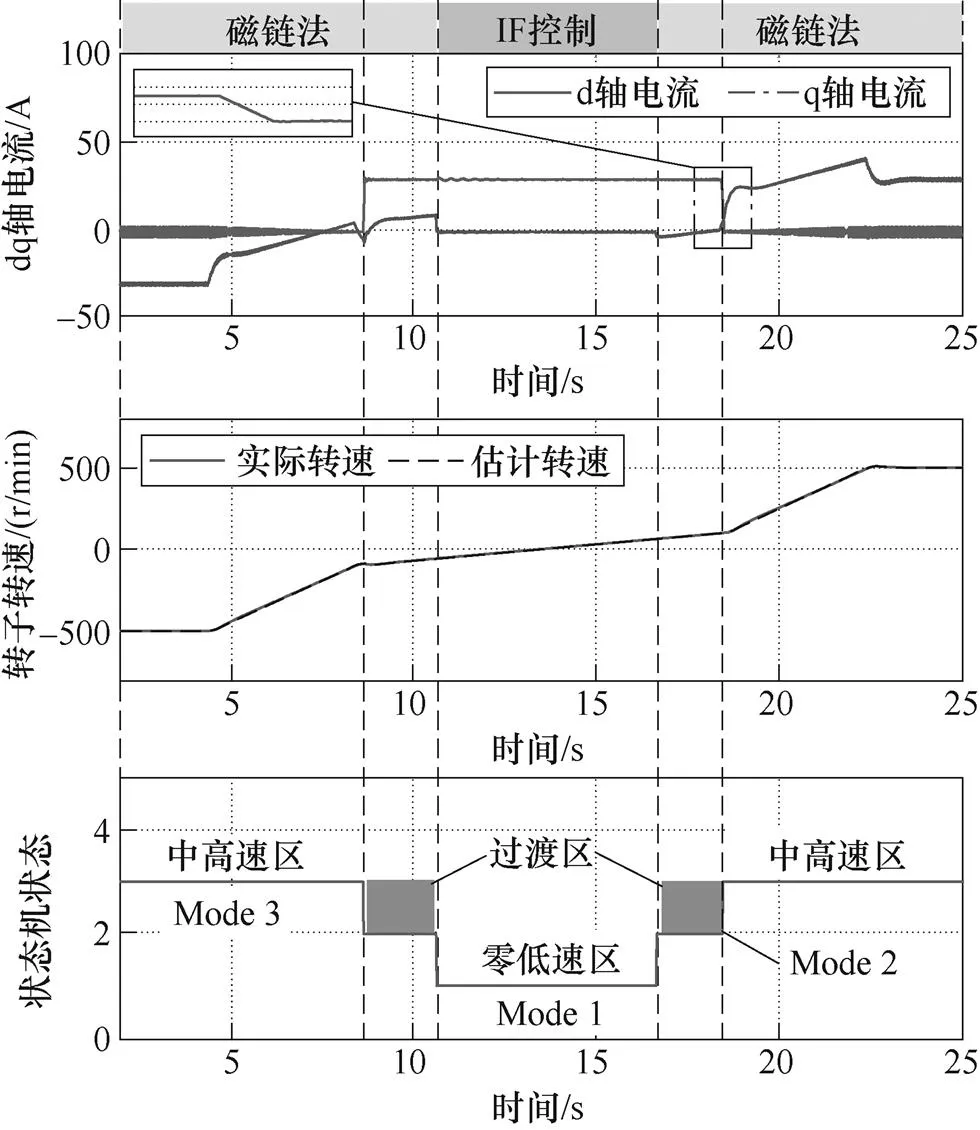
图15 转速从-500r/min到500r/min变化时dq轴电流、转子转速和状态机状态实验波形
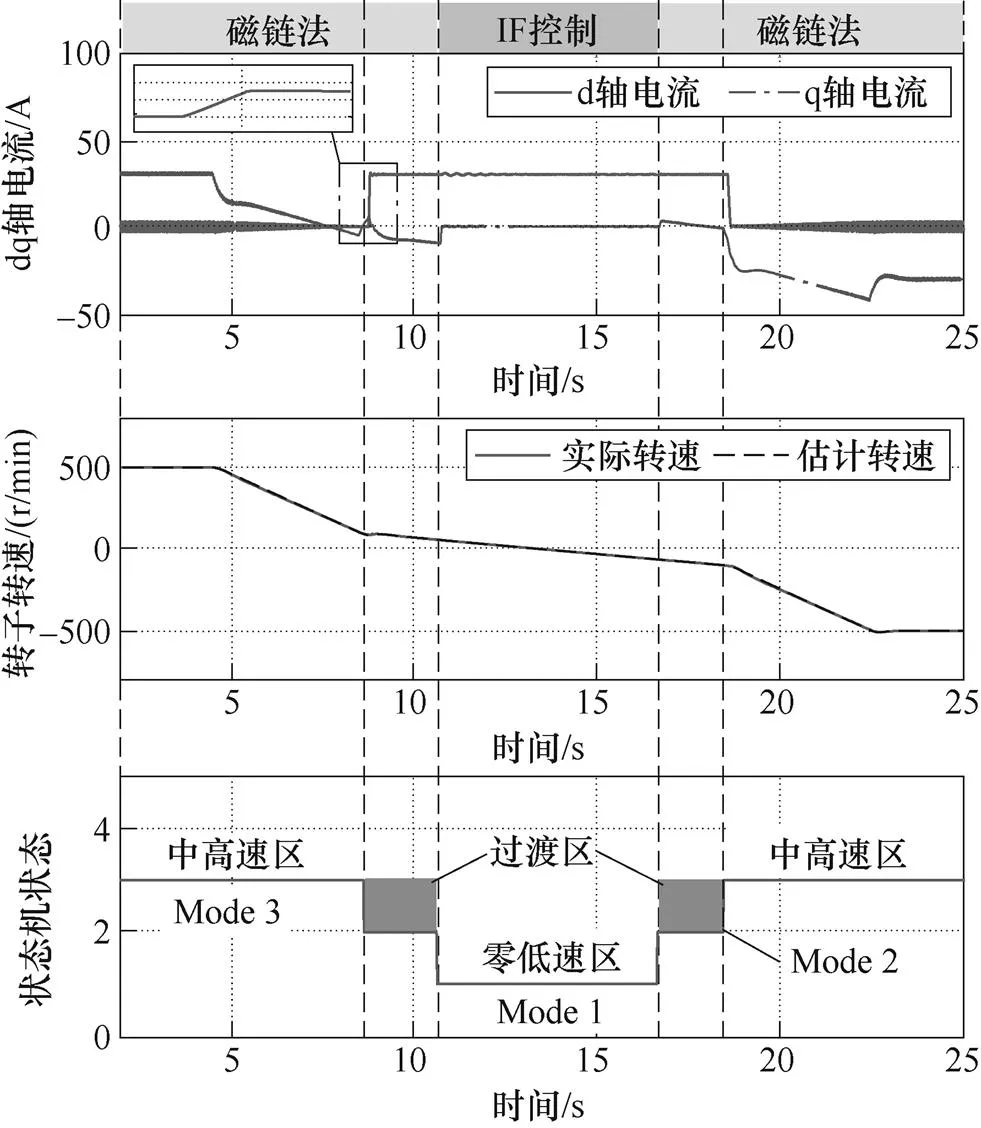
图16 转速从500r/min到-500r/min变化时dq轴电流、转子转速和状态机状态实验波形
(1)PMSM首先运行在零低速区,由0r/min开始加速,状态机处于Mode 1状态,此时IF控制给定的转子位置信息参与矢量闭环控制,有效磁链法开始工作。
图16给出电机在500r/min到-500r/min工况下的dq轴电流、转子转速和状态机状态实验波形。以电机正转为例,通过观察图16可知,PMSM由500r/min减速至0r/min过程系统工作状态如下:
(1)PMSM首先运行在中高速区,由500r/min开始降速,此时状态机处于Mode 3状态,在该模式下有效磁链法估计的转子转速和位置信息参与矢量闭环控制。
图17为全速域工况下有效磁链法位置估计结果与真实位置采样结果的误差实验波形。观察图17中转子位置误差波形可知,当中高速区采用有效磁链法时转子位置估计误差的平均值在±8r/min范围内,基本满足实际的工程需求。而当转速处于零低速区时,由于电机转速偏低,电机端口反电动势信号偏弱甚至消失,该转速区有效磁链法的位置估计性能显著下降。但是,本文中有效磁链法不用于电机的低速区控制,当电机进入低速区后,控制方法由有效磁链法切换至IF控制,因此电机依然保持正常运行状态。
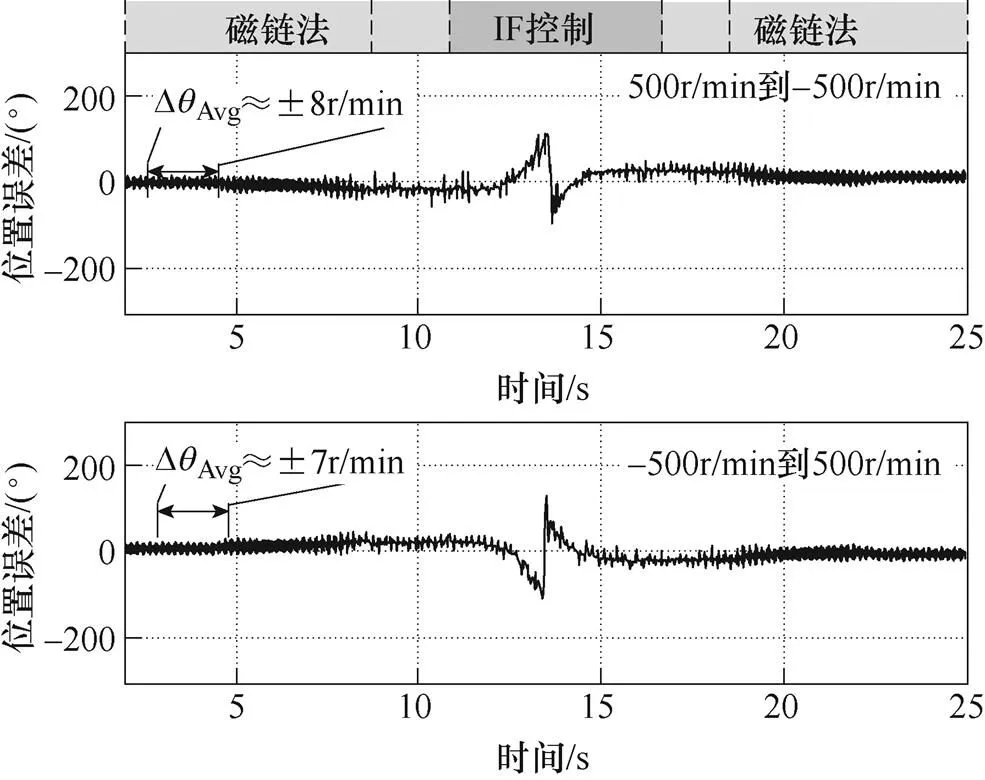
图17 全速域PMSM转子位置误差实验波形
4 结论
实验结果表明,本文所设计的无位置传感器复合控制策略能够实现PMSM的全速域稳定运行,真正意义上实现了IF控制与高速区观测器法相结合的全速域无位置传感器控制,实现过程简单可靠,工作时不产生附加的电磁噪声,具有一定的参考价值。
[1] 章春娟, 王慧贞, 刘伟峰, 等. 基于宽频带同步基频提取滤波器的永磁同步电机转子位置与转速估计[J]. 电工技术学报, 2022, 37(4): 882-891.
Zhang Chunjuan, Wang Huizhen, Liu Weifeng, et al. Rotor position and speed estimation of permanent magnet synchronous motor based on wideband syn- chronous FundamentalFrequency extraction filter[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 882-891.
[2] 赵文祥, 刘桓, 陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092-5100.
Zhao Wengxiang, Liu Huan, Tao Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092-5100.
[3] 钟臻峰, 金孟加, 沈建新. 基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无传感器控制[J]. 中国电机工程学报, 2018, 38(4): 1203- 1211, 1297.
Zhong Zhenfeng, Jin Mengjia, Shen Jianxin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulator-based model reference adaptive system[J]. Proceedings of the CSEE, 2018, 38(4): 1203-1211, 1297.
[4] 王晓琳, 刘思豪, 顾聪. 基于自适应基准锁相环的高速永磁电机转子位置误差全补偿方法[J]. 电工技术学报, 2021, 36(20): 4308-4317.
Wang Xiaolin, Liu Sihao, Gu Cong. A rotor position error compensation algorithm for high-speed per- manent magnet motor based on phase-locked loop with adaptive reference[J]. Transactions of China Electrotechnical Society, 2021, 36(20): 4308-4317.
[5] 麦志勤, 刘计龙, 肖飞, 等. 基于估计位置反馈电流解调算法的改进型高频旋转电压注入无位置传感器控制策略[J]. 电工技术学报, 2022, 37(4): 870- 881, 891.
Mai Zhiqin, Liu Jilong, Xiao Fei, et al. Sensorless control strategy of improved HF rotating voltage injection based on estimated position feedback current demodulation algorithm[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 870-881, 891.
[6] Acarnley P P, Watson J F. Review of position- sensorless operation of brushless permanent-magnet machines[J]. IEEE Transactions on Industrial Elec- tronics, 2006, 53(2): 352-362.
[7] Zhu Z Q, Gong Liming. Investigation of effectiveness of sensorless operation in carrier-signal-injection- based sensorless-control methods[J]. IEEE Transa- ctions on Industrial Electronics, 2011, 58(8): 3431- 3439.
[8] 章春娟, 王慧贞, 刘伟峰, 等. 基于宽频带同步基频提取滤波器的永磁同步电机转子位置与转速估计[J]. 电工技术学报, 2022, 37(4): 882-891.
Zhang Chunjuan, Wang Huizhen, Liu Weifeng, et al. Rotor position and speed estimation of permanent magnet synchronous motor based on wideband syn- chronous fundamental frequency extraction filter[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 882-891.
[9] 孙伟. 永磁同步电动机无位置传感器控制与高性能运行策略的研究[D]. 杭州: 浙江大学, 2017.
[10] 周扬忠, 毛洁. 基于有效磁链概念的永磁同步电动机新型定子磁链滑模观测器[J]. 中国电机工程学报, 2013, 33(12): 152-158, 198.
Zhou Yangzhong, Mao Jie. A novel sliding mode stator flux linkage estimator based on active flux principle for permanent magnet synchronous motors[J]. Proceedings of the CSEE, 2013, 33(12): 152-158, 198.
[11] Zhang Guoqiang, Wang Gaolin, Wang Huiying, et al. Pseudorandom-frequency sinusoidal injection based sensorless IPMSM drives with tolerance for system delays[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3623-3632.
[12] 刘计龙, 付康壮, 麦志勤, 等. 基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J]. 中国电机工程学报, 2021, 41(2): 749-759.
Liu Jilong, Fu Kangzhuang, Mai Zhiqin, et al. Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency Notch filter[J]. Proceedings of the CSEE, 2021, 41(2): 749- 759.
[13] 李浩源, 张兴, 杨淑英, 等. 基于高频信号注入的永磁同步电机无传感器控制技术综述[J]. 电工技术学报, 2018, 33(12): 2653-2664.
Li Haoyuan, Zhang Xing, Yang Shuying, et al. Review on sensorless control of permanent magnet synchronous motor based on high-frequency signal injection[J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2653-2664.
[14] Lin T C, Zhu Ziqiang. Sensorless operation capability of surface-mounted permanent magnet machine based on high-frequency signal injection methods[C]//Ninth International Conference on Ecological Vehicles and Renewable Energies, Monte-Carlo, Monaco, 2014: 1-7.
[15] Corley M J, Lorenz R D. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J]. IEEE Transactions on Industry Applications, 1998, 34(4): 784-789.
[16] Jang J H, Sul S K, Ha J I, et al. Sensorless drive of surface-mounted permanent-magnet motor by high- frequency signal injection based on magnetic saliency[J]. IEEE Transactions on Industry Appli- cations, 2003, 39(4): 1031-1039.
[17] 邱建琪, 周成林, 史涔溦. 注入高频脉振电压的永磁同步电机I/F控制方法[J]. 电机与控制学报, 2019, 23(7): 1-8.
Qiu Jianqi, Zhou Chenglin, Shi Cenwei. I/F control method of permanent magnet synchronous motor with pulsating high frequency voltage injection[J]. Electric Machines and Control, 2019, 23(7): 1-8.
[18] 余洋, 从乐瑶, 田夏, 等. 定子电流矢量定向下PMSM转矩脉动抑制方法[J]. 中国电机工程学报, 2019, 39(11): 3372-3382.
Yu Yang, Cong Leyao, Tian Xia, et al. Torque ripple suppression of PMSM based on stator current vector orientation[J]. Proceedings of the CSEE, 2019, 39(11): 3372-3382.
[19] 王萌, 杨家强, 张翔, 等. 一种表贴式永磁同步电机电流矢量闭环/控制方法[J]. 中国电机工程学报, 2015, 35(10): 2513-2521.
Wang Meng, Yang Jiaqiang, Zhang Xiang, et al. An/control method with closed-loop regulation of current vector for surface permanent magnet syn- chronous motor drives[J]. Proceedings of the CSEE, 2015, 35(10): 2513-2521.
[20] 刘计龙, 肖飞, 麦志勤, 等. IF控制结合滑模观测器的永磁同步电机无位置传感器复合控制策略[J]. 电工技术学报, 2018, 33(4): 919-929.
Liu Jilong, Xiao Fei, Mai Zhiqin, et al. Hybrid position-sensorless control scheme for PMSM based on combination of IF control and sliding mode observer[J]. Transactions of China Electrotechnical Society, 2018, 33(4): 919-929.
[21] 申永鹏, 刘安康, 崔光照, 等. 永磁同步电动机全转速范围无位置传感器复合控制[J]. 微特电机, 2019, 47(5): 41-46.
Shen Yongpeng, Liu Ankang, Cui Guangzhao, et al. Full speed range position-sensorless compound control scheme for PMSM[J]. Small & Special Electrical Machines, 2019, 47(5): 41-46.
[22] 刘计龙, 肖飞, 麦志勤, 等. 基于双dq空间的永磁同步电机无位置传感器起动策略[J]. 电工技术学报, 2018, 33(12): 2676-2684.
Liu Jilong, Xiao Fei, Mai Zhiqin, et al. Position- sensorless startup strategy for permanent magnet synchronous motor based on double dq space[J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2676-2684.
[23] 陈再发, 刘彦呈, 卢亨宇. 船舶永磁同步电机全转速范围无位置传感器控制[J]. 电机与控制学报, 2020, 24(5): 58-67.
Chen Zaifa, Liu Yancheng, Lu Hengyu. Sensorless control of ship permanent magnet synchronous motor at full speed range[J]. Electric Machines and Control, 2020, 24(5): 58-67.
[24] 周晨光. 滚筒洗衣机用永磁同步电机驱动控制研究[D]. 合肥: 合肥工业大学, 2020.
A Full-Speed Domain Sensorless Control Strategy for Permanent Magnet Synchronous Motor Based on Improved IF Control and Effective Flux Method
(National Key Laboratory of Science and Technology on Vessel Integrated Power System Naval University of Engineering Wuhan 430033 China)
Permanent magnet synchronous motor, position sensorless control, improved IF control, effective flux method, full speed domain
TM351
10.19595/j.cnki.1000-6753.tces.220542
国家自然科学基金面上基金资助项目(52177202)。
2022-04-07
2022-05-23
付康壮 男,1998年生,硕士研究生,研究方向为永磁同步电机无位置传感器控制技术。
E-mail: ndfukzh@163.com
麦志勤 男,1992年生,博士,助理研究员,研究方向为永磁同步电机驱动及无位置传感器控制技术。
E-mail: 827239136@qq.com(通信作者)
(编辑 崔文静)