结合实时数据产品与北斗短报文的厘米级海洋精密相对定位*
2022-12-02姬生月王振杰贺凯飞
姬生月,杨 浩,董 蔺,王振杰,贺凯飞
(1. 中国石油大学(华东) 海洋与空间信息学院, 山东 青岛 266580; 2. 青岛杰瑞自动化有限公司, 山东 青岛 266061)
随着全球卫星导航系统(global navigation satellite system,GNSS)的不断发展,卫星导航定位的精确性与可靠性也得到了增强[1],同时基于海洋资源在未来的发展潜力[2-3],结合GNSS精密导航与定位技术促进海洋领域生产发展已成为研究的热点,例如在海洋资源勘探、海上救援、水下定位等方面提供技术支持[4-7]。
精密相对定位在海洋中的应用很少,原因在于实现定位需要借助无线通信手段从基站端传输其观测数据到流动端,其服务范围不能覆盖海洋或远海[8-10]。海洋上空卫星通信由于成本昂贵普通用户无法承担,目前,远海精密导航与定位主要依赖于国外的服务提供商,包括天宝、徕卡等公司,每年的服务费用可达几十万元,限制了精密相对定位在海洋上的普及。
北斗短报文因其低廉的服务费用,成为海洋传输基站端数据,是实现海洋精密相对导航与定位的另一种选择,具有通信抗干扰能力强、可靠性高、范围广的特点[11-12]。但北斗短报文传输数据存在两个缺点:第一,单次通信容量有限,一条短报文只能传输78.5 B的内容;第二,通信频率有限,发送两次短报文需要一定的时间间隔,民用短报文的通信间隔为1 min,且该时间间隔有变为5 min的趋势。
为了克服北斗短报文传输基站端数据的第一个缺点,文献[13]提出了用伪距和相位改正数取代原始伪距和相位观测值进行传输的方法,显著减少了需要传输的数据量。为了克服北斗短报文传输基站端数据的第二个缺点,即低通信频率,文献[14-17]提出了两种方法:第一种方法为增加北斗短报文设备的数目,该方法的缺点为显著增加了通信和硬件成本;第二种为空间相对定位与时间基线相结合的方法,时间基线法是利用单台接收机在不同历元采集观测数据,计算两个历元间的相对位置。如图1所示,首先在站点ti处架设GNSS接收机进行观测,然后快速将接收机架设到站点ti+1处进行观测,最后基于不同历元间的GNSS观测数据进行差分计算ti和ti+1的相对位置。但该方法定位精度会随累积时间的延长而快速降低,1 min的累积,其三维定位精度可降低到10~20 cm;5 min的累积,其三维定位精度将会更低。
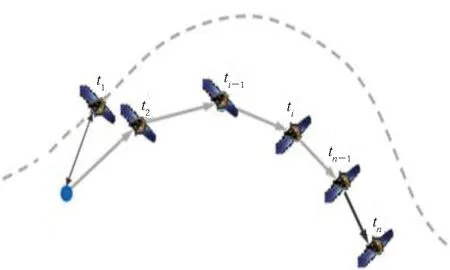
图1 时间相对定位Fig.1 Time-relative positioning
鉴于未来精密单点定位(precise point positioning,PPP)服务信号将作为数据播发通道,基于北斗三号地球静止轨道卫星播发全球卫星导航系统精密轨道与钟差等的实时服务(real-time service,RTS)产品数据[18],将有助于克服广播星历轨道和钟误差的影响[19-20],提高海洋精密相对定位的精度。因此,本研究提出了空间相对定位与基于RTS产品数据的实时精密单点定位相结合的方法,并与时间基线法进行了实验对比,评估了相应的定位精度。由于目前,即使基于多频的观测数据,长距离实时动态(real-time kinematic,RTK)的模糊度还是很难固定,所以,本文只基于双频观测数据进行了测试,须依赖模糊度的收敛,但本文所提方法有助于未来实现海洋长距离RTK。
1 RTS数据改正卫星轨道与钟差
由于未来在国内以及周边地区可以通过地球静止轨道卫星接收RTS产品数据,因此本研究中采用RTS数据对广播星历的轨道、钟差进行改正,减少卫星广播星历误差,通常修正后轨道误差约为3~6 cm,而钟差约为0.3 ns[19]。而实时产品数据提供的卫星轨道的径向、切向、法向修正值需要先由星固系转为地固系,才可修正卫星轨道。
首先计算卫星轨道在切向、法向和径向的单位向量,即
(1)
式中,X和V分别是由广播星历计算出的卫星位置和速率向量。然后将上述改正信息由星固系转为地固系:

(2)
式中,dR、dA、dC分别是轨道信息中星固系下的径向、切向和法向分量修正值。依据广播星历计算的卫星位置XSAT,可以计算实时卫星的精密轨道坐标:
X=XSAT-dX
(3)
实时精密卫星钟差T可以由广播星历计算的钟差与RTS数据中的钟差改正数得到:
T=TSAT-dT/VC
(4)
式中,TSAT为广播星历计算出的钟差,dT为实时钟差改正数,VC为真空中的光速。
2 基于北斗短报文的空间相对定位
2.1 服务端GNSS数据处理
首先在服务端计算伪距与相位改正数[13],并通过短报文设备进行发送,改正数计算公式如下:
(5)
(6)

对于伪距改正数通过减去其平均值来缩小改正数绝对值范围,而相位改正数采用对持续观测的相同卫星的相位改正数减去其首历元对应的整周数,再减去平均值,实现缩小改正数绝对值范围的效果[15],以此计算的单个改正数采用美国信息交换标准代码(American standard code for information interchange,ASCII)进行编码仅占用2 B。
2.2 卫星数据编码
对于卫星名称采用编码发送,具体如表1所示。GNSS系统类型采用数字0~3表示,占用2 bit。卫星的伪随机噪声(pseudo random noise, PRN)码北斗占用6 bit,其余系统占用5 bit。
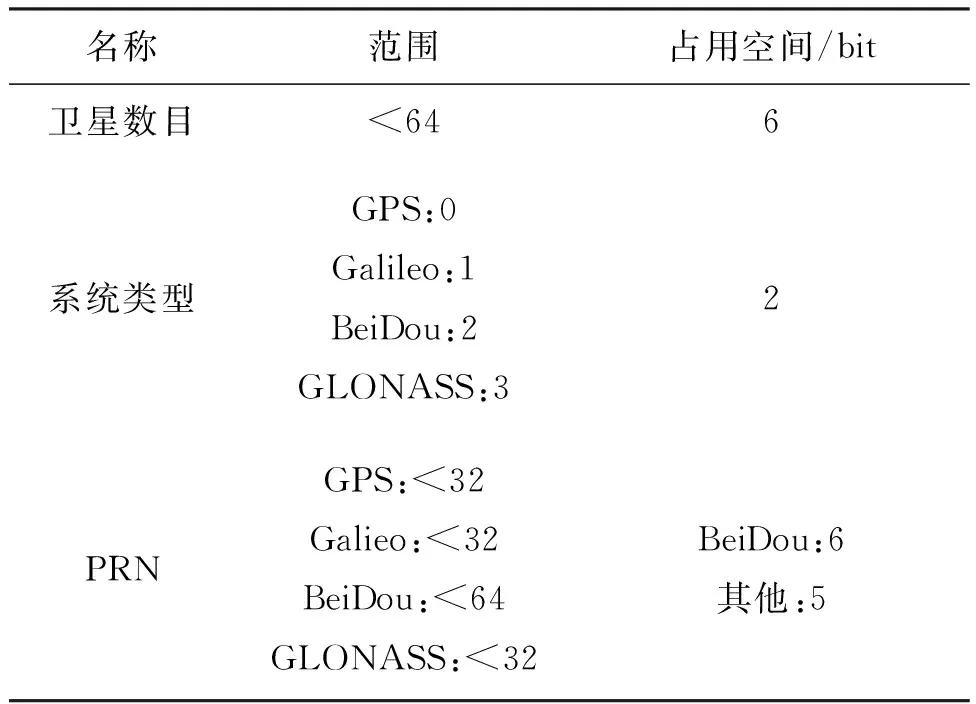
表1 卫星名称信息编码处理
按照以上数据处理方案,一条短报文可以在有限通信容量内传输13颗以上的卫星数据(含改正数及卫星名称信息), 足以实现低成本的远海导航定位。

图2 基于短报文发送基站端观测数据Fig.2 Sending observations of base station though BeiDou short-message
2.3 用户端实现空间相对定位
用户端通过短报文设备接收服务端发送的改正数据(参见图2)并进行改正,其实质等于进行了站间差分,组成了基线。最后,基于如下数学模型计算用户端坐标:
AX+BN+MZ=L
(7)
式中:N为模糊度参数;Z为天顶方向对流层延迟参数;A、B和M为对应的系数矩阵;L为多模多频GNSS双差伪距和相位观测向量(无电离层组合)。
3 带约束的实时精密单点定位
该方法的基本原理:利用空间相对定位得到的1 min或5 min间隔的用户精确坐标作为约束,求解实时精密单点定位数学模型中的模糊度,然后基于该模糊度计算其他时刻的用户位置。
设由空间相对定位得到的1 min或5 min间隔历元m的用户坐标为X′m,该历元的精密单点定位观测方程为:
AmX′m+BmN+MmZ=Lm
(8)
式中:Lm为载波相位的消电离层组合观测向量;Am、Bm、Mm为对应的系数矩阵,其中Bm为方阵,对应权阵为Pm(等权)。
忽略MmZ,则可得到
(9)
设历元i的精密单点定位观测方程为:
AiXi+BiN+MiZ=Li
(10)
方程(10)中所用的卫星与方程(8)相同,即Bi=Bm,将得到的N′代入方程(10),得
(11)
由于历元m与历元i的时间跨度不超过5 min,且对流层延迟通过模型改正了大部分,故可以忽略MmZ与MiZ的差异,方程简化为:
AiXi=Li-(Lm-AmX′m)
(12)
即
AiXi=Li-BiN′
(13)
故
(14)
因此,1 min或5 min间隔内其他任何历元的用户坐标都可以利用该方法计算得到。
4 实验测试与精度分析
4.1 远海精密相对数据处理流程
结合RTS数据产品和北斗短报文的远海精密定位流程如图3所示。服务端接收RTS数据改正轨道和钟差,进行周跳的探测修复与误差改正后,计算相位、伪距改正数,剔除高度角不符的卫星数据,依据用户端发送的观测卫星信息,选取剩余的共视卫星数据通过北斗短报文设备进行发送,用户端接收服务端发送的数据后组成基线进行空间相对定位(主要误差处理策略:电离层延迟采用双频消电离层组合,对流层延迟采用萨斯塔莫宁模型,海上接收机采用加装抑径圈对多路径效应进行削弱,卫星端和接收机端天线相位中心校正分别基于天线文件和接收机厂家提供的改正数值,固体潮汐和相位缠绕采用模型改正)。在获取分钟间隔的用户端精确坐标的基础上,利用带约束的精密单点求得其他历元的精确坐标。

图3 数据处理流程Fig.3 Data processing flow
由于基于北斗短报文的软件开发尚未完成,只能通过事后模拟数据处理的各个流程。为了评估本研究在北斗短报文设备发送频率为1 min或5 min的远海精密相对定位的精度,分别通过国际全球卫星导航系统服务(international GNSS service,IGS)站点静态数据和实测海洋动态GNSS数据进行了仿真实验测试。
4.2 静态数据实验与精度分析
选取位于西班牙的IGS参考站 EBRE、VILL,基线长度约377 km,站点位置如图4所示。下载相应站点于2019年积日266的四系统(GPS/Galileo/BeiDou/GLONASS)双频观测值数据,观测值采样间隔为1 s,数据时间为2019年9月23日00:00:00—07:00:00(GPS时间)。以EBRE作为基准站,VILL为流动站,截止高度角为15°,坐标真值采用IGS提供的周解文件中的坐标。

图4 IGS站点位置Fig.4 IGS station location
静态实验中首先对基准站数据进行重采样得到采样率为1 min和5 min的GNSS观测数据(数据采样率对应短报文发送频率间隔),结合RTS数据进行预处理计算改正数,与流动站数据组成基线进行空间相对定位,在空间相对坐标的基础上采用带约束的精密单点定位加密其他历元坐标。
图5为基于广播星历的空间相对定位与时间基线法相结合的方法1 min时间间隔定位结果,而图6为基于融合空间相对定位与精密单点定位的方法1 min时间间隔的定位结果。其中红色点代表空间相对定位的定位结果,蓝色点代表在此基础上通过时间基线或精密单点定位进行加密得到的定位结果。从图5可以明显看出时间基线法在1 min内的累积误差,在北向(north,N)与东向(east,E)上的大多数定位误差不超过5 cm,在天向(up,U)的定位误差大于E、N方向,但大多数定位误差不超过12 cm,少数历元会超过15 cm。图6所示的定位结果明显优于图5,E、N方向上的大多数定位误差不超过3 cm,在U方向上定位误差大多数不超过5 cm。

(a) E方向(a) E direction
(a) E方向(a) E direction
图7和图8分别为对应5 min时间间隔的结果明显要差一些,但在E、N方向的误差大多数保持在10 cm以内,U方向的误差大多数保持在18 cm以内,存在少数历元U方向误差最大可至40 cm左右。同样地,与图7相比,图8的定位结果要好,且与图6类似,在E、N方向的误差大多数保持在3 cm以内,U方向的误差大多数保持在7 cm以内。
(a) E方向(a) E direction

(a) E方向(a) E direction
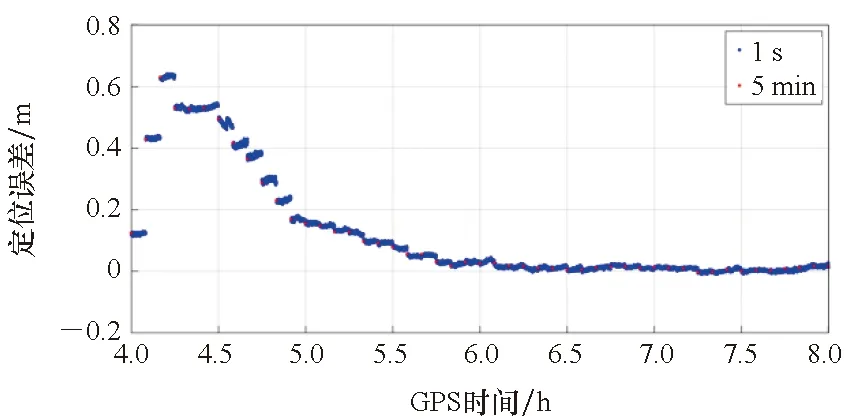
将定位1 h后的结果按时段统计相应的均方根(root mean square,RMS)误差值,每小时统计一次(参见表2),可以明显看出,短报文发送频率的时间间隔由1 min增加至5 min对时间基线法的定位精度有较大的影响,例如4 h至5 h,单时段U方向误差RMS值由4.212 cm升至14.66 cm。反观空间相对定位与精密单点定位相融合的方法在两种发送频率下都取得了较高的定位精度,U方向的RMS变化值保持在毫米级别,三维方向的RMS值都在5 cm以内。
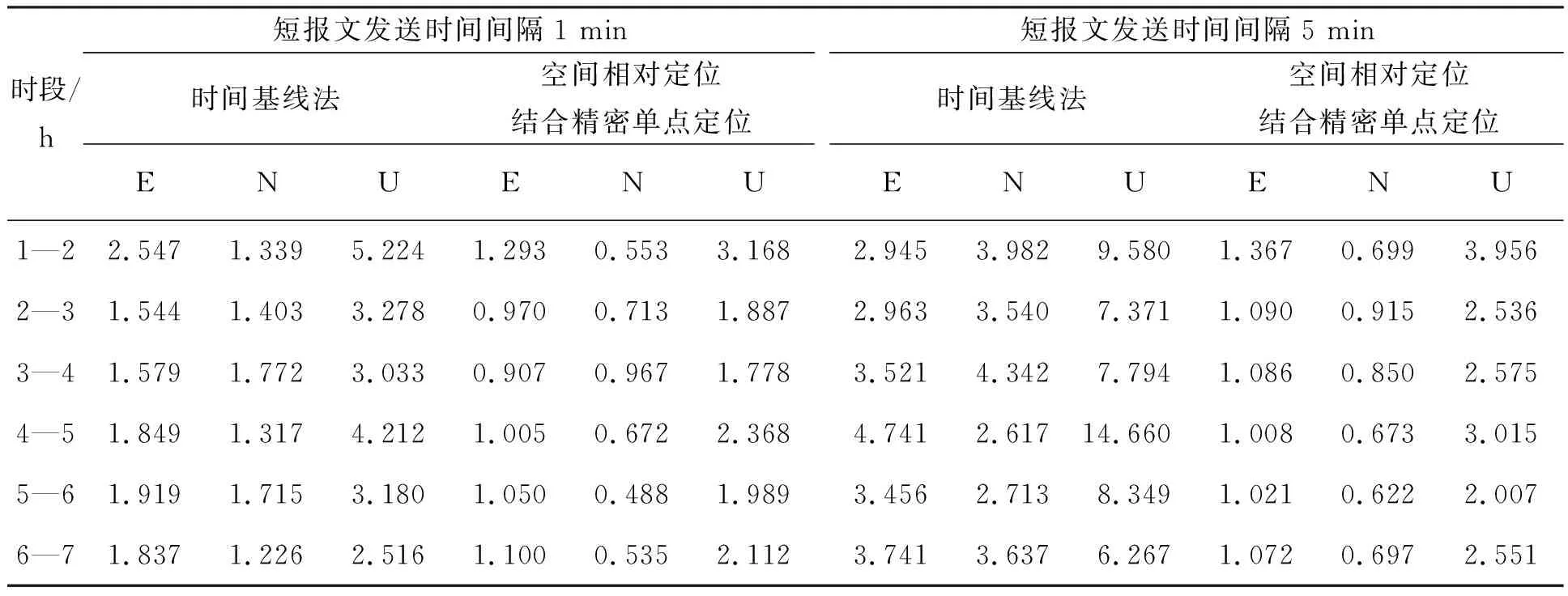
表2 定位误差RMS
4.3 海洋数据实验与精度分析
2019年9月23日,在山东省青岛市唐岛湾区域海上船只上架设了3台接收机,并在岸边架设1台天宝接收机(命名为SHOR),与架设于山东省济南市山东建筑大学的天宝接收机(命名为JINA)进行同步观测,基线长度约为282 km,岸边接收机与海上接收机距离不超过1 km,详细位置与实验仪器如图9所示。本实验只采用了船上带有抑径圈的天宝ALLOY接收机(命名为BUOY)的观测数据。接收机采集了四系统(GPS/Galileo/BeiDou/GLONASS)双频观测值数据,观测值采样间隔为1 s,数据时间为2019年9月23日00:04:00到00:08:00(GPS时间)。

(a) 实验地点(a) Experimental location (b) 实验设备(b) Experimental device图9 实验地点及仪器Fig.9 Experimental location and device
海洋实验中可以形成三条基线,JINA-SHOR、JINA-BUOY、SHOR-BUOY。首先利用Bernese5.2软件对JINA站点静态数据进行PPP处理,得到JINA站的精确坐标。然后对静态长基线JINA-SHOR,采用静态相对定位处理得到SHOR站点的精确坐标。最后对于长度1 km以内的短基线SHOR-BUOY,处理得到固定模糊度后的各个历元精确坐标。本实验中,三条基线可以形成闭合环,可以用来验证长基线JINA-BUOY的定位精度。
同样对JINA站数据进行重采样得到采样率为1 min和5 min的GNSS观测数据(数据采样率对应短报文发送频率间隔),结合RTS数据进行预处理计算改正数,与BUOY站数据组成基线进行空间相对定位,在求得空间相对定位坐标的基础上采用带约束的精密单点定位加密其他历元坐标。
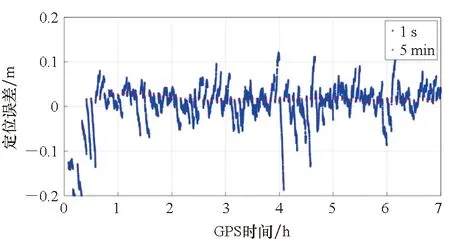
图10和图11为对应1 min时间间隔两种方法的定位结果。同样可以看出,融合空间相对定位与精密单点定位的方法的定位结果比空间相对定位与时间基线相结合的方法要好。图10中,在E、N方向的大多数定位误差不超过6 cm,在U方向的定位误差高于水平方向,大部分保持在12 cm以内,少数历元定位误差稍大,也保持在20 cm以内。图11中,在E、N方向上的大多数定位误差不超过3 cm,在U方向上的大多数定位误差不超过7 cm。

(a) E方向(a) E direction

(a) E方向(a) E direction
图12和图13为对应5 min时间间隔两种方法的定位结果,同样地,融合空间相对定位与精密单点定位的结果比空间相对定位与时间基线相结合的方法要好。与图10相比,图12的定位结果明显要差一些,但E、N方向的大多数定位误差不超过11 cm,在U方向的定位误差较大,大多数保持在20 cm以内,主要由于时间基线法采用广播星历进行历元间差分,随着差分周期的增长,星历误差和钟差不断累积,因此图12的精度比图10要低。
(a) E方向(a) E direction
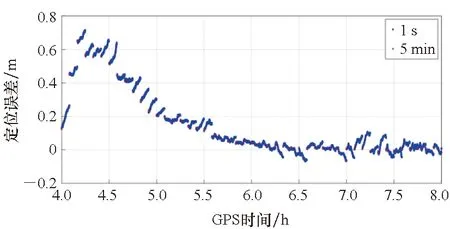
与图11相比,图13的定位结果要稍差一些,但E、N方向大多数定位误差不超过4 cm,而U方向的定位误差最大保持在10 cm以内,主要由于经过RTS数据的轨道钟差改正,星历误差得到了很大的削弱,但是对流层采用模型改正,存在偏差,且会随着时间累积,因此5 min间隔的精度不如1 min间隔的精度。
(a) E方向(a) E direction
将定位1 h后的结果按时段统计相应的RMS值,每小时统计一次(参见表3),可以看出,随着短报文发送频率的时间间隔增加,时间基线法定位误差的整体RMS值明显升高,例如6 h至7 h,单时段U方向误差RMS值由3.454 cm升至10.116 cm,E、N方向的变化值低于U方向。而空间相对定位与精密单点定位融合的方法受短报文发送频率变化的影响较小,在3个时段的三维方向上,RMS变化值都维持在1.5 cm以内,整体RMS误差保持在5 cm以内。
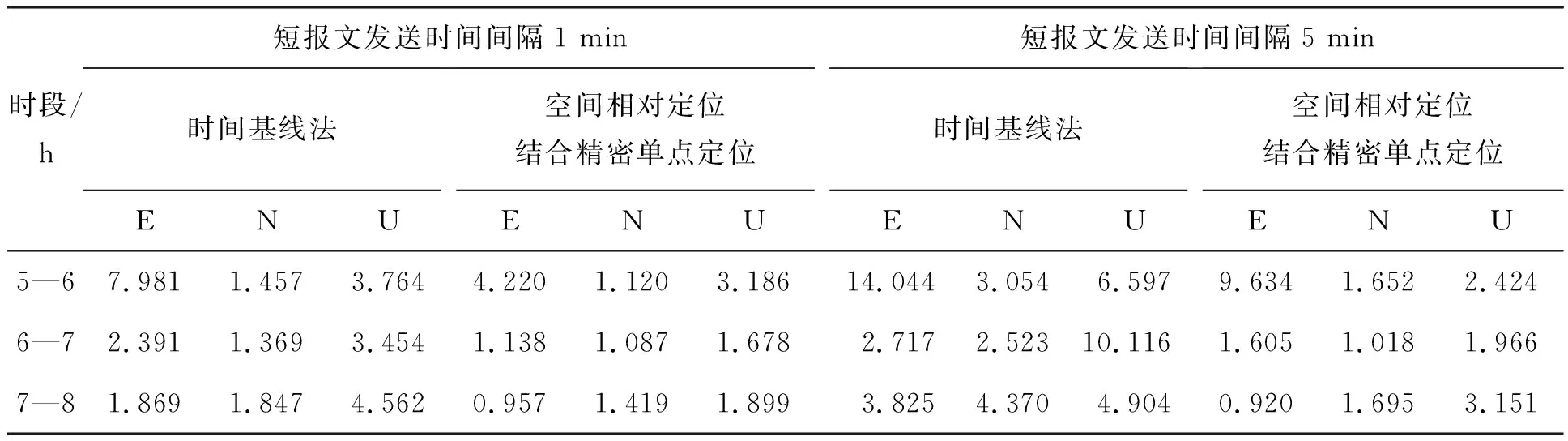
表3 定位误差RMS
5 结论
本文结合北斗短报文设备和RTS产品数据,融合空间相对定位技术和精密单点定位技术,基于四系统(GPS/Galileo/BeiDou/GLONASS)双频的静态数据和实测海洋数据进行测试,结果表明,该方案可以达到厘米级别的定位精度,甚至三维方向的定位精度优于5 cm,其定位性能明显优于基于广播星历的空间相对定位与时间基线相结合的方法。同时,该方案定位成本低廉,以传输26颗卫星数据为例,仅需2套短报文设备便可以完成数据传输,即年通信费用2 200元左右。
该方案目前的缺点:由于无法固定模糊度,所需收敛时间较长,至少半个小时。随着卫星导航系统以及相关技术的发展和建设,未来基于多频观测数据的模糊度解算方面的有关研究一定能取得突破性进展,届时可在本方案的基础之上,完善基于北斗短报文的海洋长距离RTK,对于促进未来北斗产业与海洋应用结合发展具有重要的实用意义。