进攻作战预警机与干扰机协同空域配置*
2022-12-02程东升
祁 炜,程东升,武 文,蒋 伟
(空军预警学院 防空预警装备系, 湖北 武汉 430019)
在现代空中进攻作战中,预警机和远距离电子支援干扰机(以下简称干扰机)已成为空袭战斗机不可或缺的空中支持力量,但在实际作战中,守方预警雷达与攻方预警机频段大致相同,从而容易造成攻方远距离电子支援干扰机对己方预警机造成干扰,因此多机种如何在进攻作战中进行协同配合是亟待深入研究的问题[1-5]。现有研究大多聚焦于多预警机协同、多干扰机协同问题,少数文献涉及预警机与干扰机的协同问题。文献[6-8]围绕着航线优化、相互补盲、联合发现概率等评估要素,讨论了多预警机协同方法;文献[9-11]围绕着目标威胁评估、目标动态分配等评估要素,分析了预警机对战斗机的实时指挥引导问题;文献[12]基于空域叠加方法构建了功率分配模型,分析了干扰机编队协同过程中的干扰功率分配问题;文献[13-14]基于构建的电子压制空间模型,分析了干扰机协同战斗机有效遂行突防任务的问题。
本文以有效保障战斗机遂行作战任务为约束条件,构建了预警机、干扰机及其保障对象的空域配置模型;基于预警机、干扰机空域配置的基本原则,提出了预警机和干扰机协同有效性判定准则、构建了预警机和干扰机协同作战评估模型和算法流程;仿真分析了进攻角、干扰机垂直方向因数等重要因素对两者协同空域配置和综合作战保障效能的影响。文中给出的估算模型和评判准则考虑了主要的内、外部约束条件,具有实用价值。
1 多机种空域配置参数化
由于多机种空域配置属于多属性复杂问题,需要将各机种空域配置进行参数化,为空域配置决策模型提供准确的位置坐标。

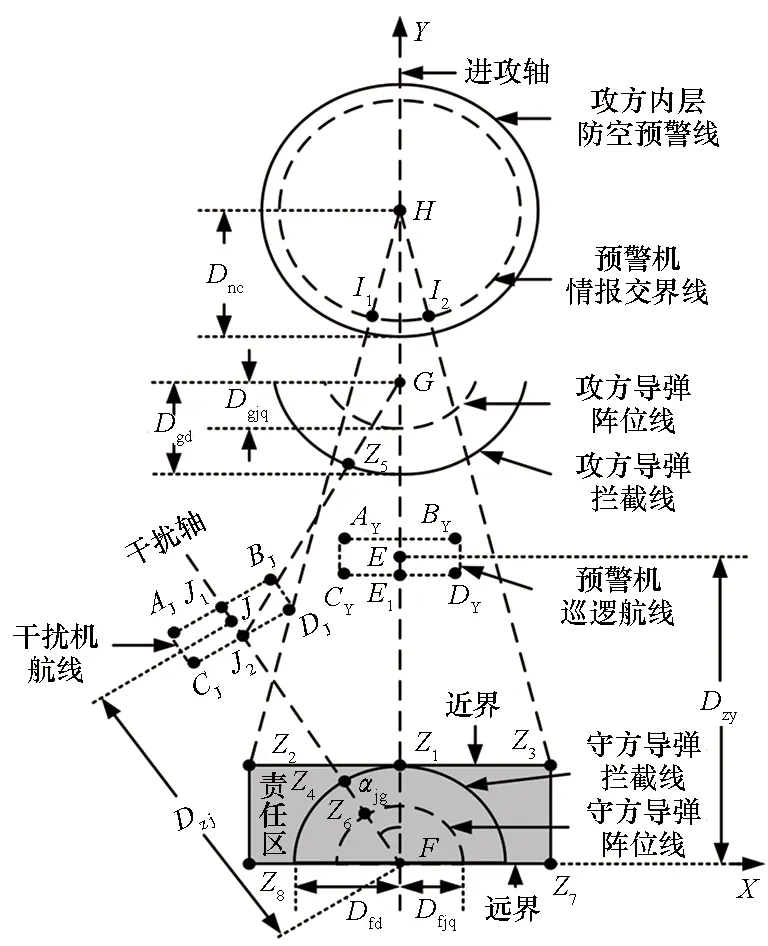
(a) 攻防态势图(a) Attack and defense situation map

(1)

(2)
其中,dxj是攻方机场到Z2或Z3点的距离,txh是攻方战斗机续航时间,tcb是攻方战斗机储备时间,tzh是攻方战斗机计划在责任区内作战所需时间。
(3)
两个坐标系间可根据欧拉方程转换,即
(4)
2 多机种空域配置决策模型
在协同作战中应尽量避免干扰机对己方预警机的电磁干扰,但在实际作战中,由于干扰机使用的干扰频段和极化方式等是由守方预警探测装备决定,因此干扰机极有可能对己方预警机造成干扰。本节基于此种情况,在多机种空域配置参数基础上,以有效遂行各自作战任务为前提,构建预警机与干扰机协同作战空域配置决策模型,为协同效能评估提供底层支撑。
2.1 预警机空域配置决策模型
预警机为空袭战斗机实时提供信息保障任务时,应遵循三个基本原则:一是尽早进入预定空域巡航警戒,且为战斗机空袭行动的前期准备、组织实施、结束返航全过程提供实时有效的引导情报保障;二是具体飞行阵位选择,必须确保自身安全,同时充分发挥固有预警探测与引导指挥能力,阵位距离应以最坏情况进行考虑;三是尽可能地避免受到己方干扰机的无意干扰和敌方干扰机的有意干扰。
基于上述空域配置原则,可得预警机阵位选择决策模型,即预警机最前阵位Dzy_Q可由式(5)确定。
Dzy_Q=(VT-Va)(Dgz-Dgd)/VT+dfkk+VaVraπ/(2g·tanβY)+Dfd
(5)
式中,Dgjq和Dgd分别是攻方地(舰)空导弹阵位线和拦截线半径,dgjk是攻方地(舰)空导弹最大射程,Dgz是攻方前置导弹拦截线等效圆心G到责任区近界Z1点的垂直距离。则预警机阵位Dzy∈[Dzy_Q,Dgz-Dgd+dfkk+Dfd]。


(6)
式中,Rmax是预警机最大探测距离,当考虑受干扰时,预警机自卫距离Rmax_ J估算公式[16-17]为:
(7)

2.2 干扰机空域配置决策模型
干扰机为空袭战斗机提供支援压制干扰时,应遵循五个基本原则:一是具体飞行阵位选择必须确保自身安全,同时又能充分发挥固有支援干扰能力;二是在空袭行动前位于距离守方较远阵位且关闭干扰源,避免过早暴露空袭意图;三是在空袭行动开始时,攻方战斗机未抵达守方远程警戒雷达预警线时,应前置干扰空域阵位施放干扰,时机不宜太早,以缩短守方雷达网重新布防或采取其他反干扰措施的时间;四是当攻方战斗机完成空袭任务并退至守方地(舰)空导弹拦截线外时,应停止施放干扰并回撤至安全空域;五是在遂行对敌压制干扰时,必须尽量避免对己方预警机的无意干扰。
基于上述空域配置原则,可得干扰机阵位选择决策模型,即干扰机最前阵位Dzj_Q可由式(8)确定。则干扰机阵位Dzj∈[Dzj_Q,(Dgz+Dfd-Dgd)/cosαjg]。

(8)
一旦确定干扰机巡航阵位,则可进行干扰机航线规划。 令Z6点到干扰机直飞航线的垂直距离为Dgr,且Z6点与直飞航线最远端的连线与干扰轴的夹角为αgr,干扰机与目标指示雷达的最远距离为Rj_max=Dgr/cosαgr。 可得干扰机在完成作战任务的前提下αgr估算公式为:
(9)

显然,只有当干扰机处于干扰轴上的J2点(φgr1=φgr2=0)且Dgr1不大于Rj_max时,才能完成其作战任务。因此,干扰机实际直飞航线LJ可由式(10)决定。
(10)

2.3 目标角度估算
令adis是预警机到责任区边界的距离,bdis是预警机到干扰机的距离,cdis是预警机到预警机情报交接线的距离,ddis是干扰机到责任区边界的距离,edis是干扰机到预警机情报交接线的距离,θJYZ是干扰机到预警机与责任区边界的角度,θJY是干扰机到预警机再到干扰机的角度,θJYJ是干扰机到预警机与预警机情报交界线的角度。由预警机直飞航线、干扰机直飞航线、责任区边界、预警机情报交接线等在坐标系XFY中的显函数表达式,可得:
(11)
而θJYJ、θJY和θJYJ的计算公式为:
(12)
在坐标系X′FY′中,干扰机在预警机方向的指向角φJY的分段估算公式为:
(13)
2.4 协同空域配置优化决策
在预警机与干扰机进行协同作战时,其协同空域配置优化后的方案既要满足预警机能有效遂行情报保障任务,又要满足干扰机有效遂行对守方雷达的电磁干扰任务。因此,令式(7)中φjy=φJY,且θyT分别为θJY、θJYZ、θJYJ,可得到相应预警机在干扰机方向上的预警机最大自卫距离(即预警机遭受干扰机电磁干扰时的最大探测距离)Rmax_ JY、在责任区边界方向上的预警机最大自卫距离Rmax_ JYZ和预警机在预警机情报交界线方向上的最大自卫距离Rmax_ JYJ。则预警机能有效遂行情报保障任务的判定准则为:
(14)
干扰机与预警机协同作战时,干扰机能有效遂行电磁干扰任务的判定准则为:
(15)
3 协同效能评估模型及算法
协同效能评估模型是判别预警机与干扰机协同作战效能好坏的准则,也是协同任务规划中最优协同作战方案生成的判断依据。
3.1 评估模型
预警机和干扰机协同作战效能,是指双方已充分发挥装备预警探测和电磁干扰能力,且在自身安全是否有保障的前提下,以何种作战效果来有效完成各自的作战任务。因此,预警机和干扰机协同作战效能指标EXT可描述为:
EXT=AXT·FXT·TXT
(16)
式中,AXT是协同安全因子,表征预警机和干扰机所处阵位是否同时满足自身安全的状态。
(17)
FXT是协同任务有效完成因子,表征预警机和干扰机是否在各自所处阵位能够同时有效完成各自的作战任务,可定量描述为:
(18)
TXT是协同作战效果因子,为预警机和干扰机协同作战时,在各自单圈直飞航线上的飞行距离与其独立作战时在安全阵位区间内最大直飞距离比值的乘积,可定量描述为:
(19)
其中,LXT_Y和LXT_J是预警机和干扰机协同巡航直飞距离,LY_max和LJ_max是预警机和干扰机独立作战时巡航最大直飞距离,JXT是干扰机在协同作战时对预警机的有效干扰效能指标,可通过“六域”协同因子进行描述。
JXT=MXT·fXT·tXT·γXT·PXT·KXT
(20)
式中:MXT∈[0,1]是模式域协同因子,当干扰机采用的有效干扰模式不对预警机雷达产生影响时取0;fXT∈[0,1]是频域协同因子,当干扰机与预警机雷达工作在不同频率时取0;tXT∈[0,1]是时域协同因子,当干扰机施放干扰时间与预警机雷达感知情报时间不同时取0;γXT∈[0,1]是极化域协同因子,当干扰机极化方式与预警机雷达极化正交时取0;PXT∈[0,1]是能量域协同因子,当干扰机施放的干扰能量进入预警机雷达接收输入端可忽略不计时取0;KXT∈[0,1]是空域协同因子,当干扰机施放的干扰对预警机雷达探测威力覆盖作战任务空域不造成影响时取0。
3.2 算法
预警机与干扰机协同作战时空域配置寻优的实用算法流程如下:
初始化处理:确定攻守双方参战飞机及其配属装备、导弹性能参数、地(舰)空导弹阵位线半径和各作战流程消耗时间,设定干扰机、预警机和守方目标指示雷达具体参数。
Step1:以式(5)和式(8)为依据,确定Dzy、Dzj和αjg的取值范围,从而确保AXT=1。
Step2:独立作战空域配置寻优。根据作战任务选定进攻角αjg,以式(6)和式(10)为依据,在Step 1结果中搜索LY_max和LJ_max。
Step3:协同作战空域配置。
1)分别按Rmax_ JY≥bdis、Rmax_ JYZ≥adis、Rmax_ JYJ≥cdis为顺序的判定准则,逐步缩小Dzy和Dzj的取值范围,最终确定所有满足协同条件的Dzy_i、LY_i、Dzj_i、LJ_i,i∈[1,N],从而确保FXT=1。
2)将LY_max、LJ_max、LY_i、LJ_i数据代入式(19)解算TXTi。
Step4:预警机和干扰机最优协同作战效能指标EXT_opt=max{TXTi|i∈[1,N]}。
Step5:绘制最优Dzy、LY、Dzj、LJ空域配置图。
4 仿真分析
4.1 参数设置
攻守双方参战飞机及其配属装备、导弹性能参数、地(舰)空导弹阵位线半径和各作战流程消耗时间等如表1所示。

表1 攻守双方参数设置
4.2 αjg和FY(εYJ)对协同空域配置的影响
令JXT≠0,且αjg=0°、FY(εYJ)={1,0.05},可得图2和图3所示的预警机与干扰机协同空域配置关系。

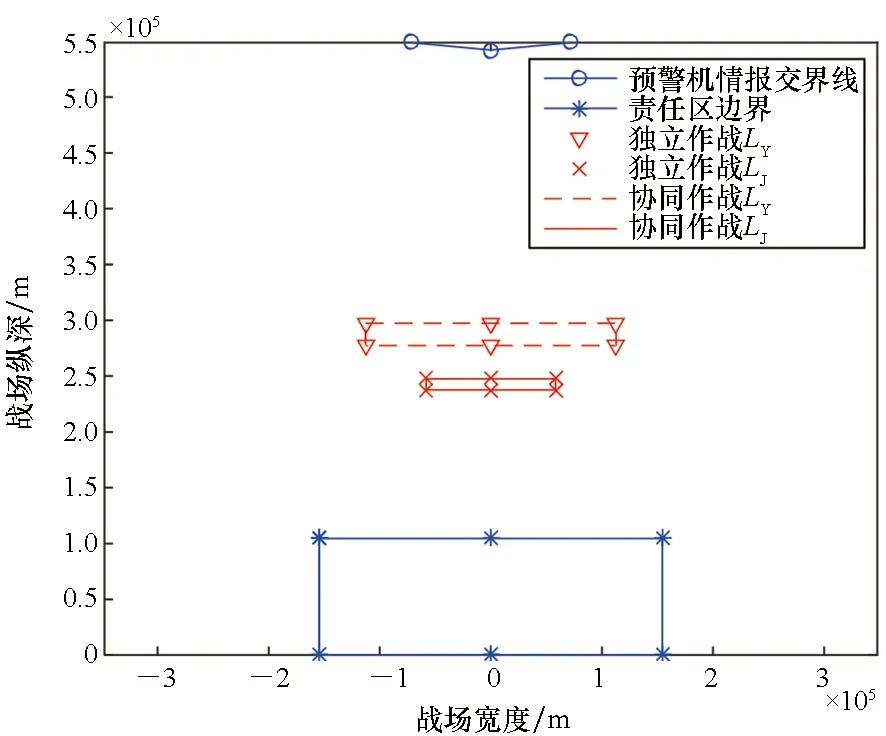
(a) 最优空域配置图(a) Optimal airspace configuration diagram
(a) 最优空域配置图(a) Optimal airspace configuration diagram
由图2、图3可知:
1)当FY(εYJ)=1时,最优协同空域配置为Dzy=282 km、Dzj=290 km、LY=97.05 km、LJ=81.15 km、EXT_opt=0.228 59。预警机与干扰机所处阵位基本相同,且协同直飞航线长度均比独立遂行作战任务时阵位的直飞航线长度要短。其原因是干扰机主瓣和尾瓣均对预警机造成较大干扰,致使其不能有效遂行对预警机情报交界线和责任区的探测任务,因此航线在空域配置时要相对错开。
2)当FY(εYJ)=0.05时,最优协同空域配置为Dzy=287.5 km、Dzj=242.6 km、LY=225.6 km、LJ=116 km、EXT_opt=0.763 7。预警机阵位后置于干扰机,且协同直飞航线长度与独立遂行作战任务时基本相同。这说明此时干扰机尾瓣已对预警机探测责任区不造成太大影响,但其主瓣依然对预警机探测预警机情报交界线干扰很大。
3)不论是协同作战效能还是预警机和干扰机的巡航直飞航线长度,方案2明显优于方案1,其原因是FY(εYJ)的取值不同。这说明若想获得更佳的协同空域配置,预警机必须降低干扰机垂直波瓣对其探测能力的影响;又因为干扰机的干扰对象处于较低高度层,致使其干扰主瓣下俯、尾瓣上仰,所以干扰机阵位应处于预警机前上方。
令JXT≠0,且αjg=10°、FY(εYJ)=0.05,可得图4所示的预警机与干扰机协同空域配置关系。
由图4可知:预警机与干扰机最优协同空域配置为Dzy=288.9 km、Dzj=246.6 km、LY=222.5 km、LJ=118.8 km、EXT_opt=0.766 7。方案3与方案1相比协同作战效能几乎相同,但预警机和干扰机的阵位及直飞航线长度均有变化,原因是进攻角变大,致使干扰机直飞航线偏转,从而干扰机阵位相对前移、预警机阵位相对后置。

(a) 最优空域配置图(a) Optimal airspace configuration diagram
5 结论
根据攻防双方主要参战力量的性能,本文针对守方重点目标遂行空袭作战任务中预警机与干扰机协同空域配置问题,提出预警机遂行预警探测任务时的三条原则和干扰机遂行远距离电子支援干扰任务时的五条原则,并据此构建空域配置模型,且依据所提效能评估模型,通过仿真对关键参数与协同空域配置的关系进行分析。本文协同空域配置原则、定量模型以及仿真结论可供实际预警机与干扰机协同兵力部署决策时参考使用。本文尚未考虑多预警机与多干扰机协同问题,有待进一步研究。