无人机卫星导航系统的电磁干扰态势评估方法*
2022-12-02张庆龙王玉明程二威陈亚洲
张庆龙,王玉明,程二威,陈亚洲
(1. 陆军工程大学石家庄校区 电磁环境效应国防重点实验室, 河北 石家庄 050003; 2. 海军航空大学, 山东 烟台 264000)
无人机的兴起是现代战争强调实时战场控制、情报收集以及适时准确攻击的产物[1],但在现实复杂的战场电磁环境下,各种电磁信号交织,对于集成了各种用频装备的无人机产生了巨大影响,严重制约了无人机作战效能的发挥[2]。现有的小型无人机,其定位功能主要依靠卫星导航定位系统,当电磁干扰严重影响无人机的卫星导航定位系统时,会给无人机的飞行安全带来潜在的风险[3],因此有必要开展导航接收机的电磁干扰态势评估方法研究,为改善无人机在复杂电磁环境下的安全飞行条件提供依据。
文献[4]提出了一种导航接收机性能评估方法,以可见星的载噪比、伪距观测误差和所有可见星的几何精度因子作为评价指标体系,基于信息“熵”的理论算法,提出了一种虚拟的正、负理想评估方法,并甄选了几种实际场景进行了分析与评估比较,该方法适用于不同场景下卫星导航接收机定位性能优劣的评估比较。文献[5]研究了北斗B1I信号接收机在带限白噪声、匹配谱干扰和连续波三种干扰下的定位性能。但以上研究都没有对同一场景下的电磁干扰态势做出评估。文献[6-7]从强电磁脉冲下导航接收机的耦合机理分析入手,基于不同射频前端元器件(低噪声放大器和限幅器)进行了仿真分析,得到了两种元器件在强电磁脉冲耦合干扰下的性能曲线。文献[8]基于上述工作,通过天线仿真软件和电路仿真软件的联合仿真,得到了接收机射频前端电路敏感器件的毁伤评价曲线。但实际上由于无人机在飞行过程所面临的电磁环境多为非强电磁场环境,且电磁干扰对导航接收机造成的影响一般为阻塞干扰[9],而非毁伤效应,所以研究导航接收机的电磁干扰评估而非毁伤效应评估就显得十分有意义。本文通过开展导航接收机的电磁干扰效应试验,得到了不同卫星信号跟踪失锁时的效应阈值曲线,通过分析找到了影响效应阈值的敏感参数,然后结合深度学习的方法,建立针对效应阈值的XGBoost预测模型。根据试验过程中导航接收机的效应现象,给出了导航接收机的电磁干扰态势等级,基于此,提出了一种无人机卫星导航接收机电磁干扰态势评估方法。
1 导航接收机跟踪环路电磁干扰效应阈值的变化规律
无人机飞行过程中,在无外界明显电磁干扰的情况下,其导航接收机接收到的卫星信号质量受到达地面卫星信号功率、多径干扰等因素的影响,其影响程度反映成可视化结果即卫星信号载噪比,因此在无外界电磁干扰的情况下,信号载噪比代表的是所有环境因素和接收机内部噪声共同作用下接收机实际对导航信号跟踪的能力。特别是当无人机在空中飞行时,由于多径干扰的作用减弱,接收机接收到的卫星信号载噪比较为稳定,所以可以用无电磁干扰时的卫星信号载噪比(即初始载噪比)表征导航信号的功率。文献[10]指出接收机内部跟踪环路中存在这样一个载噪比C/N0门限值:凡是信号小于C/N0这个门限值,环路将会丧失稳定跟踪该弱信号的能力,因此可以用C/N0门限值作为接收机卫星跟踪失锁的判据。
由于接收机内部各个跟踪环路的处理流程类似,现只针对8号卫星进行研究,开展电磁干扰注入效应试验,得到了在不同初始载噪比下和不同干扰信号频率下跟踪环路失锁的效应阈值,如图1所示;初始载噪比一定时,不同干扰信号带宽下跟踪环路失锁的效应阈值如图2所示。
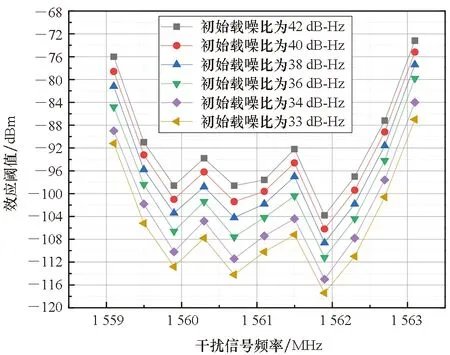
图1 不同初始载噪比下的效应阈值Fig.1 Effect threshold under different initial C/N0

图2 不同干扰信号带宽下的效应阈值Fig.2 Effect threshold under different interference signal bandwidth
根据图1可以得出以下结论:
1)干扰信号频率不同时,跟踪环路失锁的阈值不同,且两侧阈值明显大于带内阈值,两者之间为非线性变化。
2)接收机内导航信号的初始载噪比越高,跟踪环路失锁的阈值就越高。实际试验过程中发现,当初始载噪比较高时,跟踪环路失锁阈值与初始载噪比之间基本呈线性关系,但当初始载噪比临近载噪比门限时,此时两者之间不再是线性关系。
根据图2可知,当干扰信号中心频率一致时,不同干扰信号带宽下,跟踪环路失锁的阈值也不一致,两者之间为非线性变化。对比图1和图2可以看出,在窄带和宽带电磁干扰下,跟踪环路失锁的阈值曲线相对于单频电磁干扰下的阈值曲线更为平滑,这是由于导航信号对于连续波干扰具有易感性[11]。
综上可知,引起导航接收机跟踪环路失锁的因素包含导航信号的初始载噪比、干扰信号频率以及干扰信号带宽,由于这三种因素与环路跟踪失锁阈值之间的关系都为非线性,采用传统的确定性分析方法难以展开非线性的预测建模,且通过试验测量所有单源电磁干扰下环路跟踪失锁的效应阈值工作量巨大,不易实现,所以开展机器学习的办法将是可行的。首先通过开展电磁效应试验,构建原始试验数据样本,然后利用原始数据进行机器学习方法的训练建模,最后通过优化模型可以实现对导航接收机在不同电磁敏感参数下(包括干扰信号频率和干扰信号带宽)和不同初始载噪比下跟踪环路失锁效应阈值的预测,从而减少通过大量试验确定失锁效应阈值的工作量。
2 导航接收机跟踪环路失锁阈值的预测建模
2.1 XGBoost回归预测方法
XGBoost算法是近年来新兴起的一种预测算法,被广泛应用于工业故障检测、银行业、经济领域和医学领域等,其预测效果质量高。XGBoost算法是基于梯度决策树(gradient boost decision tree, GBDT)框架上提出的[12],其不仅在计算速度上得到了提升,并且由于该算法具有二阶连续可导的目标函数,能够提高算法的泛化能力[13],还通过对目标函数引入正则项,进而有效避免过拟合现象的产生[14]。
包含有n条m维的数据集可以表示为:
D={(xi,yi)}(xi∈Rm,yi∈R,i=1,2,…,n)
(1)
那么模型可以表示为:
(2)

F={f(x)=wq(x)}(q:Rm→{1,2,…,T},w∈RT)
(3)
其中:wq(x)为决策树叶子节点的权重向量,w为叶子权重,q为树结构。
模型的目标函数可以表示为:
(4)
XGBoost的思想是每次迭代运算将增加一棵树,目的是为了使预测值不断接近真实值[15],当大量的回归树建立好后,通过使用“贪心算法”搜索最优的回归树结构,使目标函数的值最小,此时的最优回归树结构即为最优的XGBoost模型。
2.2 训练建模的流程
根据XGBoost回归预测算法,导航接收机跟踪环路失锁效应阈值的训练流程如图3所示。
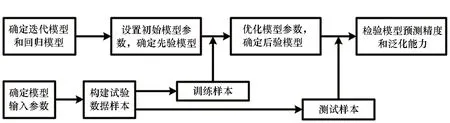
图3 失锁效应阈值的模型训练流程Fig.3 Model training process of the loss of lock effect threshold
根据图3所示,基于XGBoost回归算法的导航接收机跟踪环路失锁效应阈值的预测方法包括:
1)确定模型输入参数及构建试验数据样本。通过第1节中电磁干扰效应试验结果分析得知,导航信号的初始载噪比C/N0、干扰信号频率fj和干扰信号带宽Bj是影响跟踪环路失锁效应阈值的敏感参数,因此将这3个参数设定为模型输入参数。由于接收机内部所有跟踪环路的处理流程基本相似,因此只选取8号卫星作为试验对象,以上述3个参量作为试验时的可调变量(其中窄带和宽带干扰信号由噪声调制而成),开展电磁干扰效应试验,得到导航接收机跟踪环路失锁的效应阈值,最终构建数据样本量为750组,将其中的700组作为训练样本,50组作为测试样本。
2)确定迭代模型和回归模型,设置初始模型参数。选择基于上升树的计算迭代模型和线性回归的目标函数模型,并在此基础上设置初始模型参数,确定先验模型。
3)模型训练。将训练样本中的3个参量作为模型输入,跟踪环路失锁的效应阈值作为模型输出,不断优化调整模型参数,并确定最优参数,得到后验模型。
4)模型预测精度检验。利用测试样本中的3个参量作为后验模型的输入,可以预测得到模型的输出,并与测试样本中跟踪环路失锁的效应阈值进行对比分析,完成对模型预测精度和泛化能力的检验。
2.3 模型训练
通过上述模型训练流程进行XGBoost模型训练,为了显示XGBoost模型训练结果的优越性,训练过程中对高斯过程回归(Gaussian process regression, GPR)模型和支持向量机回归(support vector regression, SVR)模型同步进行了训练,训练结果如图4所示,由于训练数据样本量较大,故只取前290组数据进行展示。图5所示为不同模型的训练误差。

(a) XGBoost模型训练结果(a) XGBoost model training results
根据图4和图5可以看出,对于跟踪环路失锁效应阈值的训练结果,XGBoost模型的训练精度高于GPR模型和SVR模型的训练精度,其中SVR模型虽然可以通过调整内部参数优化训练结果,但最优参数下的训练误差依旧很大,超过了国军标规定的3 dB允差[16],并不满足实际需求,而GPR模型和XGBoost模型的训练误差在规定的允差范围内。

(a) XGBoost模型训练误差(a) XGBoost model training error
为了检验训练模型在预测方面的效果,利用测试样本,对GPR模型和XGBoost模型的预测性能进行比较,结果如图6所示。

(a) XGBoost模型预测误差(a) XGBoost model prediction error
根据图6的预测结果可以看出,GPR模型的预测误差较大,最大处超过了15 dB;而XGBoost模型的预测误差较小,优于GPR模型的预测结果,满足国军标规定的3 dB允差。
虽然GPR模型通过内部调参,可以使得训练具有较好的效果,但在实际预测时,预测效果较差。这是由于导航接收机针对单频干扰具有易感性,在单频干扰下,导航接收机的电磁干扰阈值随频率变化剧烈,对于需要数据预处理的GPR模型来说,当某一个输入变量的变化幅度较大时,会增大其预测误差。相比于GPR模型,XGBoost模型算法不需要数据的预处理,进行训练和预测时更加方便快捷,且能获得较好的预测结果。
模型预测结果的准确度受限于接收机对有用信号载噪比测定的精度以及无人机环境感知平台对干扰信号特征参数测定的准确度。
1)在有用信号方面,由于该模型训练基于导航信号的初始载噪比,所以接收机载噪比测定的精确度以及稳定性越高,对于预测结果的准确性也就越高。特别是当无人机在空中飞行时,由于受到周围环境影响较小,接收机各跟踪环路的载噪比较为稳定,通过模型预测无人机的当前跟踪环路失锁的效应阈值也就更加准确。但是,当无人机所处环境多径干扰严重时,接收机载噪比测定的准确性严重降低,预测结果的准确性也将会大大降低。
2)感知平台对干扰信号频率以及功率测定的准确度越高,其用于模型预测结果的准确度也就越高。
3 无人机卫星导航系统的干扰态势评估方法
3.1 无人机卫星导航系统在单源电磁干扰下的态势评估方法
根据导航接收机电磁干扰试验的效应现象,可以将导航接收机在电磁干扰下的定位状态定义为稳定状态、性能降级和定位丢失三种等级。其中,稳定状态表示为接收机内卫星信号的载噪比可能因电磁干扰而出现下降,但没有出现卫星跟踪丢失的现象;性能降级表示为接收机因受到电磁干扰影响,接收机内部跟踪环路开始出现失锁的现象,第一颗卫星跟踪丢失;定位丢失表示为接收机内部多个跟踪环路失锁,跟踪卫星数目不满足导航接收机最低定位要求,接收机定位失败。
通过前期导航接收机的电磁干扰效应试验得知,在窄带电磁干扰、宽带电磁干扰以及带外单频电磁干扰下,当干扰信号功率和频率一定时,接收机内所有卫星信号的载噪比衰减一致;而当干扰信号为带内单频电磁干扰时,由于导航信号对连续波干扰的易感性,所有卫星的载噪比衰减不一致,因此在单频干扰下低载噪比的卫星不一定是最先丢失的卫星,所以在对无人机导航接收机干扰态势评估方面应对每颗卫星跟踪丢失的干扰阈值进行评价,而不能单纯从卫星载噪比的大小入手。
无人机卫星导航系统在单源电磁干扰下的态势评估方法如下:
1)无人机飞行过程中,导航接收机内卫星信号的载噪比短时间内变化较小,当导航接收机载噪比开始普遍下降时,且此时无人机环境感知平台监测到的干扰信号出现时,记录上一时刻卫星信号的载噪比为初始载噪比。
2)根据每颗卫星的初始载噪比和环境感知平台监测到的干扰信号特征(频率和带宽),通过XGBoost预测模型可以得出每颗卫星信号在当前状态下跟踪失锁效应阈值,记为Pi(其中i为卫星信号)。
3)利用环境感知平台测量得到的干扰信号功率Pj,将Pj与每颗卫星的失锁阈值作差Pi,得到每颗卫星的电磁干扰余量,即
Δi=Pi-Pj
(5)
假设接收机观测到的有效卫星为6颗,且最低定位卫星数目要求为4颗,根据干扰余量的值得到以下排序:
(6)
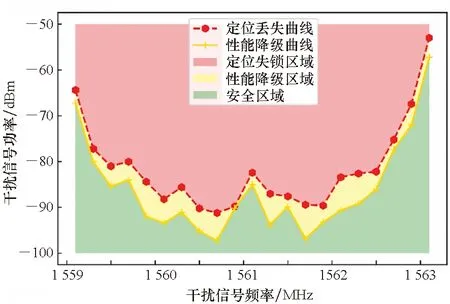
(a) 单频干扰下的电磁干扰态势(a) EMI situation under single frequency interference
3.2 无人机卫星导航系统在双源电磁干扰下的态势评估方法
由于无人机在飞行过程中不可避免会遇到多源电磁干扰的情况,因此开展卫星导航系统在多源电磁干扰下的态势评估方法将十分有意义。以带内双源电磁干扰为例,前期通过数学建模的方式得到了导航接收机跟踪环路在带内双源电磁干扰下的效应模型,如式(7)所示。
(7)
式中,S为压制系数。当S≥1时,表示当前双源电磁干扰信号的功率组合会导致跟踪环路中的卫星跟踪丢失;当S<1时,表示当前双源干扰信号的功率组合不会导致跟踪环路中的卫星跟踪丢失。为了验证模型的有效性,后续设计并开展了针对多款导航接收机的双源电磁干扰效应试验,最终利用试验数据验证了该模型的有效性。
本节将在这一模型的基础上,开展无人机卫星导航系统在双源电磁干扰下的态势评估方法:
1)无人机飞行过程中,导航接收机内卫星信号的载噪比短时间内变化较小,当导航接收机载噪比开始普遍出现下降时,且此时无人机环境感知平台监测到干扰信号出现时,记录上一时刻卫星信号的载噪比为初始载噪比。
2)根据每颗卫星的初始载噪比和环境感知平台监测到双源电磁干扰信号的特征(频率和带宽),通过XGBoost预测模型可以得出,每颗卫星信号分别在两个干扰信号作用下的跟踪失锁阈值,分别记为Pi1和Pi2,其中i为卫星信号,1和2为双源电磁干扰信号的标记。
3)利用环境感知平台测量得到双源电磁干扰信号的功率分别为Pj1和Pj2,然后根据带内双源电磁干扰下的效应模型,如式(8)所示。
(8)
其中,Si为当前双源电磁干扰下的压制系数。根据式(7)中的临界判据,每颗卫星的电磁干扰余量为:
Δi=1-Si
(9)
同样假设接收机观测到的有效卫星为6颗,且最低定位卫星数目要求为4颗,根据干扰余量的值得到以下排序:
(10)

3.3 无人机卫星导航系统抗干扰的技战法
对于一个屏蔽性能良好的导航接收机来说,其“后门”耦合的可能性较小,干扰能量主要通过天线耦合进入导航终端内部,从而对导航终端形成干扰。在无人机飞行过程中,当干扰信号的能量已经引起了导航终端出现性能降级的状态且临近定位丢失状态时,为确保无人机的飞行安全,可以采取如下技战法来确保无人机的飞行安全。
1)改变无人机的飞行姿态:通过改变无人机的飞行姿态,调整无人机导航天线的方向图,一方面将天线接收效率最低的方向对准干扰信号的来向,另一方面确保天线的主方向图对准更多卫星信号的来向。一般来说,与天线主瓣垂直的方向其增益最小,将该方向对准干扰来向可以达到最大限度对干扰信号的抑制,如图8所示。
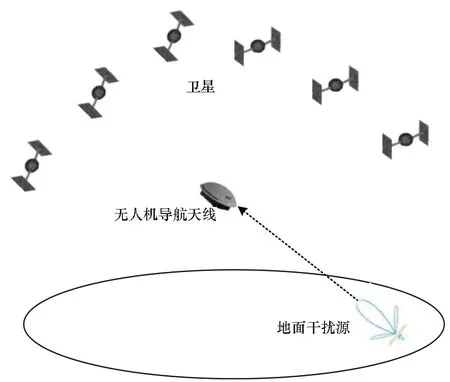
图8 无人机飞行姿态调整Fig.8 Flight attitude adjustment of the UAV
2)改变无人机的飞行轨迹:一方面可以依据“远离干扰源”的指导原则,调整无人机的飞行轨迹,使其在水平和高度上远离干扰源,达到降低天线对干扰信号耦合效率的目的;另一方面由于干扰信号近地传播时损耗较大,而导航信号受到的影响较小,所以可以根据地形特点适时采取降低飞行高度的策略。
4 结论
卫星导航系统作为无人机的“眼睛”,其定位功能受扰会严重影响无人机的作战效能,本文利用机器学习的方法建立了导航接收机跟踪环路失锁效应阈值的预测模型,给出了导航接收机电磁干扰态势的评估方法,主要结论如下:
1)通过开展试验,得到影响跟踪环路失锁效应阈值的关键参数,在此基础上利用XGBoost深度学习的方法构建了跟踪环路失锁效应阈值的预测模型,该预测模型相对于SVR模型和GPR模型具有更高的训练精度以及预测精度。
2)根据导航接收机在电磁干扰试验中的效应现象,给出了导航接收机在电磁干扰态势下的受扰等级,为接收机的电磁干扰态势评估提供依据。
3)提出了导航接收机在单源以及双源电磁干扰下的态势评估方法,利用该方法,可以预测无人机飞行轨迹上卫星导航系统的电磁干扰态势,使无人机提早进行技战法规划,确保无人机的完好性以及任务的成功率。