基于动态特征点的巡检机器人目标定位系统设计
2022-12-01朱李超茅晓亮
朱李超,施 会,茅晓亮
(国网上海奉贤供电公司,上海 201400)
0 引言
传统巡检通常以人工巡检为主,工作人员利用笔和纸记录检查情况,再凭借个人经验判断设备是否出现故障。随着自动化技术不断发展,机器人逐渐应用在巡检作业中,尤其在变电站巡检中发挥关键作用。对变电站中所有设备做定期维护是必备工作,只有实时掌握设备状态、及时排除安全隐患,才能保障变电站安全运行。利用机器人代替人工的巡检方式,不但可以节省人力,还能避免因人员技术水平不足、工作经验欠缺等因素造成的巡检不到位情况,提高巡检效率,进一步保障电力系统安全。在巡检机器人的众多子系统中,目标定位系统尤为重要,如果没有准确的定位功能,机器人将难以精确获取故障点的位置信息,巡检工作无法顺利完成。但巡检工作通常在室外进行,环境复杂且不可控因素较多,因此对机器人目标定位技术提出更高要求。
为满足巡检机器人高精度定位需求,相关学者做了深入研究。倪江楠等[1]提出基于光学导航的机器人定位方法。通过激光扫描方式获取机器人在全局坐标系中的位置,利用机器视觉系统测量机器人与目标之间的实际距离,完成定位。卢清秀等[2]基于动态跟踪测量算法设计目标定位系统。通过选择出的系统硬件设备,确定各单元通信方式,利用动态跟踪激光测距设备感知机器人运动环境,针对环境信息做特征识别,获得目标环境全局地图,预测目标位置。
当机器人做简单的直线运动时,上述方法可以满足定位精度需求,一旦机器人做复杂的曲线运动,目标定位误差会提高。为了改善这一缺陷,确保机器人在所有环境下都能有较高的定位精度,本文基于动态特征设计了一种目标自动定位系统。
1 基于动态特征点的巡检机器人目标定位系统构建
1.1 系统总体组成架构
巡检机器人目标定位系统的整体结构如图1所示。主要分为基站子系统和移动基站系统[3],具备图像采集、无线通信和智能避障等功能[4]。系统主要部分功能如下。

图1 巡检机器人定位系统整体架构
a.基站子系统:是定位系统的重要组成部分,集成高分辨率摄像机、拾音器与各类传感器,通过自主遥控方式完成巡检任务。
b.移动基站系统[5]:其中设置充电设备,且安装对射传感器,不仅保证机器人全自动巡检,还能避免充电过程受外界干扰。为机器人在定位过程中提供路径信息,包括目标位置、巡检内容以及设备间隔情况等。巡检过程中可能会出现检测盲点,将红外监控作为定位系统的辅助补充,和机器人之间联动,实现巡检全覆盖。
1.2 系统硬件设备选取
系统硬件设计主要包括相机、采集卡、图像显示设备和步进电机选型,结合定位系统实际需求,保证定位精度前提下,最大程度节约设计成本。本文系统选取的硬件设备如下。
a.工业相机[6]:选用国外Basler公司的高清摄像机。该相机的接口有效改善采集信息的速度,与其他相机相比,分辨率更高,不会受到传输距离影响,且图像受环境干扰较小。相机采集到的数据利用PCIE总线传输,通过PC机完成图像处理,实现图像动态显示。
b.采集卡[7]:利用Camera Link接口的采集卡,支持图像实时显示和压缩功能。此外,能够实时显示、记录信息,可在不同模式下高效传输数据。
c.图像显示设备[8]:显示模块的主要工作是显示采集到的图像,并实时跟踪目标,通过定时器实时更新采集数据。显示设备的参数要求如表1所示。

表1 显示设备参数配置要求
d.步进电机:作用是下雨时保护机器人的充电装置不被淋湿。在选型过程中应考虑控制精度、尺寸与成本等因素。经过综合考虑,选用的电机与驱动器类型分别如下。
电机选用三相四线电机,主要参数如表2所示。

表2 电机参数
驱动器选取两相混合式[9],和上述电机相互配合可保证机器人稳定运行。驱动器具体参数如表3所示。

表3 驱动器参数
1.3 系统软件功能设置
1.3.1 开发环境与通信模式
为适应系统硬件设备设置需求,从开发环境、封装设计和通信方案等方面设置系统软件。
a.开发环境。定位系统在如表4所示的开发环境下完成设计。

表4 系统开发环境

图2 软件封装结构
c.通信方案。定位系统通信模块需同时兼顾通信面积与带宽需求,该系统需设定无线通信和边缘通信2种方案,无线通信利用Wi-Fi通信模式,构建AP基站,扩大网络覆盖范围,且减少维护费用;边缘通信利用蓝牙技术连接网络,具备成本低、可靠性高等优势,但是此种方法通信距离很近。
1.3.2 目标定位算法
利用上述硬件设备,配合软件开发环境与通信模式,经过图像预处理,提取关键的动态特征点,利用三帧差分算法预测目标位置,实现定位。
a.图像增强。由于光照等因素影响,摄像机采集到的图像容易出现过亮或过暗区域。这种现象会掩盖图像很多重要细节特征,影响动态特征点提取效果。因此,本文在提取特征点之前先对图像做均衡化处理[11],增强细节信息。图像均衡化函数表示为
(1)

b.动态特征点提取。图像中的细节信息得到增强后,利用动态特征点提取算法获取目标关键特征。该算法的核心思想为:结合加速分割特点,如果图形内某像素灰度值和邻近像素灰度值相差较多,则将该相似度当作动态特征点。
假设将像素点p作为中心,以3个像素大小为半径确定1个圆形邻域。在该邻域内,若3个点的像素值均高于或低于p点,此时p点即为特征点,反之去除该点。评估某点是否属于特征点的表达式为
根据单因素试验结果,选择乙醇浓度(A)、浸提时间(B)、浸提温度(C)和浸提pH(D)4个因素,采用Box-Behnken Design响应面分析法确定最优提取条件(表1)。从表 2可知,方案15的提取量最高,为4.94 mg/100g;其次是方案7和方案18,提取量分别为4.77 mg/100g和4.72 mg/100g;方案26的提取量最低,仅为2.73 mg/100g。对试验结果进行多元线性回归拟合分析得提取量(Y)与各因素间的二次多项回归方程:
(2)
I(x)为特征点附近某点灰度值;I(p)为特征点灰度值;εd为设定的阈值;circle(p)为像素点p的集合。
特征点本身不具备旋转不变性,所以使用灰度质心算法检测具有方向信息的特征点,获取其灰度质心,将质心和特征点之间的连线作为该点主方向。则邻域图像矩为
(3)
q为与特征点相邻的点;I(x,y)为点(x,y)处的灰度值。
设定邻域中图像质心为
(4)
特征点和上质心之间的夹角就是该点的主方向,即
θ=arctan(m01,m10)
(5)
经过上述操作,即可获取带有方向信息的特征点,再通过金字塔检测,获取特征点的尺度特征,即:
(6)
L(x,y,σ)=G(x,y,σ)*F(x,y)
(7)
F(x,y)为初始图像;G(x,y,σ)为尺度函数,其中,σ为尺度因子。
将初始图像和高斯差分函数做卷积运算[12]可获得尺度空间D(x,y,σ),即
D(x,y,σ)=[G(x,y,σ)-G(x,y)]*F(x,y)=
L(x,y,σ)-L(x,y)
(8)
通过上述处理,能够获得由各类尺度组成的空间金字塔,包括各类尺度特征点,将这些点融合即可实现目标特征提取。
c.目标定位。结合提取到的目标特征,利用三帧差分法预测目标运动区域。如果3帧图像分别表示为k-1、k和k+1,它们在点(x,y)处变现出的灰度分布情况分别为fk-1(x,y)、fk(x,y)和fk+1(x,y),对其差分过程描述为:
Ek-1,k(x,y)=|fk(x,y)-fk-1(x,y)|
(9)
Ek,k+1(x,y)=|fk+1(x,y)-fk(x,y)|
(10)
通过合理阈值T′对图像进行阈值化处理,获得二值图像为:

(11)
(12)
(13)
2 仿真实验数据分析与研究
为验证本文系统的合理性与定位功能准确性,设置仿真实验。选择目标为电力巡检机器人,综合分析变电站实际环境,利用四轮移动式机器人,其功能指标如下:需具备防水性能,可全天候满足室外工作需求;安装有磁传感器,执行定时巡检操作;当电量不足时,自动寻找充电设备;搭载有图像采集功能的摄像头,并配有实时监控报警装置。主要性能指标为:可自由完成前进、退后和转弯等动作,最大制动距离小于0.4 m,机器人体积较小,轻便灵活。实验中其他仿真环境指标如表5所示。
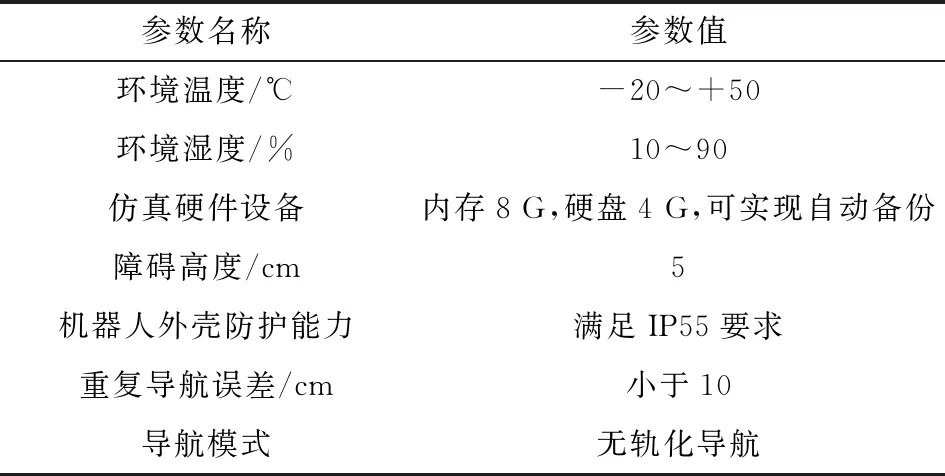
表5 仿真实验指标
在上述仿真环境下,利用RFID里程计测试定位误差,该设备放置在巡检机器人底部,与地面之间的距离为3 mm。在50 m的仿真场地内,RFID里程计的定位测试如图3所示。

图3 RFID里程计定位测试
假设在实验环境中,存在10个待定位的目标点,这些目标点位置是固定的。利用本文方法、光学导航和动态跟踪测量方法对这些点定位,并分析这些算法的定位误差,仿真结果如图4所示。

图4 不同算法定位结果
由图4能够看出,针对每一个目标点,本文方法均能得出准确的定位结果,其他2种方法的定位误差相对较大。这是因为本文方法在提取目标特征点之前,对图像做了均衡化处理,改善图像灰度值,获得更加精准的定位信息。
上述实验的目标位置是固定不变的,定位精度要求容易满足。为了提高定位难度,在动态仿真环境下,随着目标不断做直线、曲线和混合运动,测试以上方法的动态跟踪能力。结果分别如图5~图7所示。

图5 直线动态定位测试结果

图6 曲线动态定位测试

图7 混合运动动态定位测试
由图5看出,当目标做直线运动时,3种方法均表现出很好的跟踪能力,定位误差较小,都能控制在可接受范围内。其中,本文方法的误差最小,与实际轨迹基本完全吻合。
由图6看出,和直线运动相比,当目标进行曲线运动时,3种方法的定位跟踪误差相对较大,尤其在急转弯情况下,容易偏离轨道。
综合图5~图7可知,本文系统在上述3种目标运动状态下都具备准确定位的能力,定位精度始终保持较高状态,证明本文系统定位功能突出,性能稳定。同时表明提取图像动态特征点方法适用于目标定位。
3 结束语
巡检机器人是一种技术密集型产品,不仅适用于电力行业,在煤矿挖掘、产品制造等领域均能提高工作效率。为了实现机器人目标精准定位功能,本文利用动态特征点提取的方法设计定位系统,通过图像采集、处理获取目标信息,快速提取关键动态特征点,预测目标位置。仿真实验证明了该系统定位误差较小,满足机器人巡检需求。