基于自适应滑模控制器的机械臂运动控制方法
2022-12-01丛成
丛 成
(中国石油集团川庆钻探工程有限公司长庆钻井总公司,陕西 西安 710018)
0 引言
机械臂具有较多特点,如模型不确定、时变和强耦合等,属于非线性系统[1]。机械臂分支中存在负载,当机械臂的加速度、速度和位姿不同时,会发生非线性变化,且各关节在机械臂系统中产生的摩擦力也会出现变化[2]。各通道之间的相互控制、通道输出以及负载系统之间的连接,都会导致机械臂系统出现复杂耦合。上述问题给机械臂运动控制带来了不确定性,因此,需要对机械臂运动控制方法进行分析和研究。
屈海军等[3]提出基于二型模糊遗传控制器的冗余自由度机械臂运动控制方法,但该方法无法消除机械臂运动过程中存在的高频振动,降低了方法的跟踪精度和控制稳定性;王俊等[4]提出基于关节极限的冗余机械臂混沌动力学及控制方法,该方法在控制过程中受高频振动的影响,导致其存在控制性能差的问题。
针对上述问题,提出一种基于自适应滑膜控制器的机械臂运动控制方法。
1 观测器设计
外部干扰信号g通常存在于机械臂控制系统中,如果此时直接对机械臂进行运动控制,会增加机械臂系统的输出。对机械臂运动控制器进行设计时,通过观测器观测能够观测到的干扰信号,其次采用滑膜控制方法[5-6]对无法观测到的干扰信号进行补偿处理。
机械臂系统的动力学方程为

(1)

在上述机械臂系统动力学方程[7]的基础上设计非线性干扰观测器,即

(2)
(3)
Q(q)为正定惯性矩阵。
非线性观测器[8-9]在运行过程中的观测误差F表达式为
F=g-
(4)

(5)


(6)

2 自适应滑膜控制器
基于自适应滑膜控制器的机械臂运动控制方法,通过设计自适应滑膜控制器,完成机械臂的运动控制。
用x1表示机械臂系统的控制误差向量,其计算式为
x1=q-wc
(7)
wc为期望的关节位置矢量。

用B1表示机械臂子系统1的Lyapunov函数[10-11],其表达式为
(8)
对Lyapunov函数求导,并结合上述公式获得
(9)
(10)
dTd为关节位置滑膜控制误差矩阵。结合上述公式,获得
(11)
扰动ψ在实际过程中是无法直接计算得到的,因此,基于自适应滑膜控制器的机械臂运动控制方法采用自适应率对扰动ψ进行估计。

用B表示自适应滑膜控制器的Lyapunov函数,其表达式为
(12)
χ为大于零的常数。根据Lyapunov函数设计自适应滑膜控制器的等效控制律为[12-13]

(13)
F(q)为机械臂动力学模型的标称值;j为正定对角系数矩阵。在此基础上获得自适应滑膜控制器的切换控制律为
υs=-σF(q)jsign(s)
(14)
sign(·)为符号函数;σ为正常数。


(15)

此时将自适应滑膜控制器的切换控制律转变为
(16)
tanh(·)为双曲正切函数,其表达式为
(17)
此时自适应滑膜控制器的总控制律为υ,即
υ=υs+υe
(18)
采用自适应滑膜控制器根据总控制律υ对机械臂进行运动控制。
3 实验与分析
为了验证本文方法的整体有效性,需要对其进行测试。


表1 机械臂参数
分别采用本文方法、文献[3]方法和文献[4]方法进行机械臂运动控制测试,跟踪机械臂的运动角度,跟踪结果如图1所示。
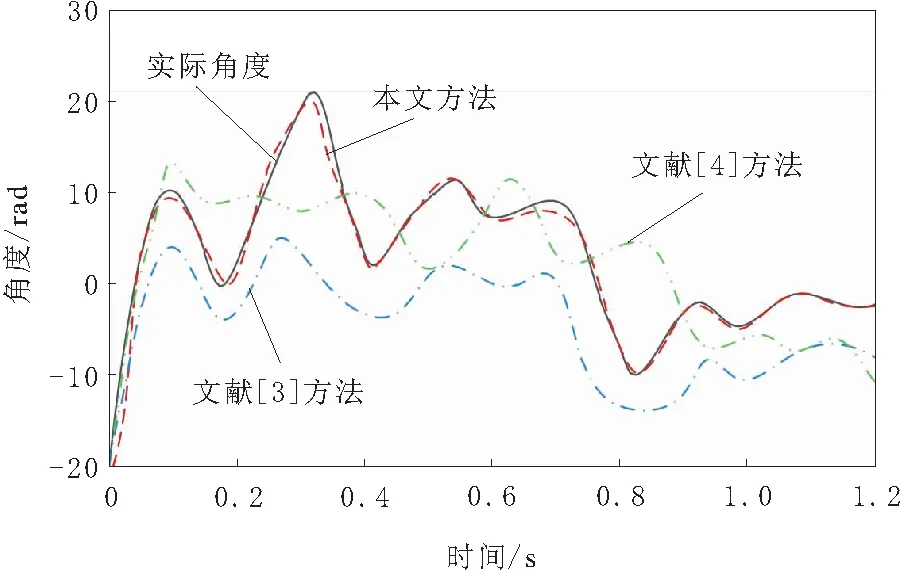
图1 角度跟踪结果
分析图1可知,采用本文方法对机械臂进行运动控制时,获得的移动角度跟踪结果与机械臂实际移动角度基本相符;采用文献[3]方法对机械臂进行运动控制时,获得的角度曲线变化趋势与实际角度变化趋势基本一致,但在相同时间点下获得的角度值均低于实际角度值;采用文献[4]方法对机械臂进行运动控制时,获得的跟踪结果变化趋势和数值都与实际角度存在较大差距。通过上述分析可知,在机械臂运动控制过程中,本文方法可准确跟踪机械臂的移动角度,表明本文方法具有较高的跟踪精度。
在外界干扰τ=[-sint3cost-2sintsint]T测试环境下,通过控制力矩对比不同方法的控制稳定性,测试结果如图2~图5所示。
分析图2~图5可知,在不同的外界干扰环境下,本文方法的控制力矩均没有明显波动,控制力矩随时间变化较为平稳。采用文献[3]方法和文献[4]方法进行控制稳定性测试时,2种方法在外界干扰环境下的控制力存在明显波动,因为文献[3]方法和文献[4]方法无法在机械臂运动控制过程中消除高频振动,导致力矩控制结果的波动较大。而本文方法在设计自适应滑膜控制器的过程中,为了抑制机械臂运动控制过程中存在的高频振动,采用了补偿器,能够有效消除机械臂运动过程中存在的高频振动,进而获得平稳的控制力矩曲线,提高自适应滑膜控制器的稳定性。

图2 τ=-sin t时的控制力矩

图3 τ=3cos t时的控制力矩

图4 τ=-2sin t时的控制力矩
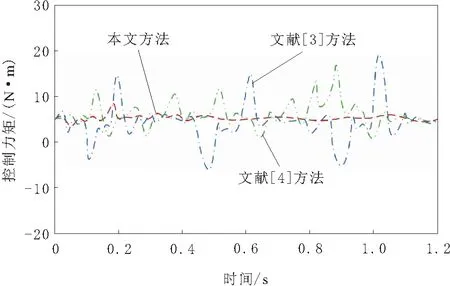
图5 τ=sin t时的控制力矩
根据给定的机械臂轨迹θLd=2cost、θLd=2sint、θ1d=sin 2t、θ2d=cos 2t,采用本文方法、文献[3]方法和文献[4]方法对机械臂进行运动控制,对比不同方法的控制误差,测试结果如图6所示。
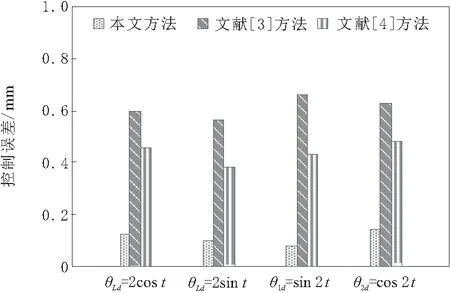
图6 不同方法的控制误差
分析图6可知,采用本文方法对机械臂进行运动控制时,获得的控制误差均保持在0.2 mm以内;采用文献[3]方法进行运动控制测试时,获得的控制误差在0.6 mm上下波动;采用文献[4]方法进行运动控制测试时,控制误差在0.4 mm附近取值。根据控制误差对本文方法、文献[3]方法和文献[4]方法的控制性能进行排序:本文方法>文献[4]方法>文献[3]方法。
4 结束语
针对目前机械臂运动控制方法存在跟踪精度低、控制稳定性差和控制性能差的问题,提出基于自适应滑膜控制器的机械臂运动控制方法,该方法设计了自适应滑膜控制器完成机械臂的运动控制,并将补偿器引入自适应滑膜控制器中,解决了目前方法中存在的问题,为机械臂系统的发展奠定了基础。