基于CNN和SVM的无人机多光谱遥感草地植物识别
2022-12-01刘文昊靳瑰丽刘智彪李嘉欣王生菊雷雅欣
马 建,刘文昊,靳瑰丽,宫 珂,刘智彪,李 莹,李嘉欣,王生菊,雷雅欣
(新疆农业大学草业学院/新疆草地资源与生态重点实验室/西部干旱荒漠区草地资源与生态教育部重点实验室,新疆 乌鲁木齐 830052)
草地植物群落具有一定的植物种类组成、外貌和空间结构,有效识别草地群落主要物种,是掌握草地群落结构变化、划分草地类型、明确草地退化和修复现状,以及保护草地植物多样性的基础[1]。在草地植物识别中,传统方法多依靠实地地面调查,该方法获取的信息可靠有效,但在范围广、时效长的监测和动态更新方面难以获得令人满意的效果。无人机遥感操作灵活、安全,其搭载传感器获得的影像数据,分辨率高、时效快、不受云层影响,为植物识别提供了新途径[2-4]。
伊犁绢蒿(Seriphidiumtransiliense)荒漠草地属于温带大陆性半干旱半荒漠气候,在我国集中分布于新疆北疆地区的平原与低山地段,是当地主要的春秋放牧场[5];由于其所处位置自然条件恶劣,加上被过度利用,致使其面积不断减少、生产力下降、群落物种结构发生改变、建群种伊犁绢蒿退化严重[6]。前人对伊犁绢蒿荒漠草地进行了一系列的研究,这些研究大多针对群落或植物的地面光谱特征分析[7]、利用特征波段进行光谱层面的分类[8],为实现无人机植物识别研究奠定了基础。已有研究表明利用无人机遥感能够准确进行物种识别[9],目前众多学者对不同分类器的分类精度进行了对比研究,卷积神经网络(Convolutional neural network,CNN)和支持向量机(Support vector machines,SVM)分类方法被较多学者选用,且都具有较高的分类精度。例如柳宗伟等[10]利用CNN和SVM对不同地物识别,其中SVM识别精度最高;赵静等[11]对田间杂草进行识别发现SVM对其识别效果较好;而汪传建等[12]基于CNN对农作物进行分类,总体分类精度优于SVM分类算法。无人机识别精度受诸多因素影响。其中,植物生长时期的不同,会导致光谱反射率的变化[13];而飞行高度增加,空间分辨率降低,纯净像元的反射率会受到相邻像素的影响,导致植被的光谱反射率差异显著[14]。物候期及飞行高度改变所引起的光谱和空间分辨率的变化对识别精度的影响成为研究者们的关注内容。
因此,本研究基于多光谱无人机获取的3个时期和3个飞行高度的伊犁绢蒿荒漠草地多光谱数据,提取伊犁绢蒿荒漠草地植物冠层的反射率,计算最佳指数因子(Optimum index factor,OIF),采用CNN和SVM识别模型进行识别,分析其对识别精度的影响,筛选出该类草地主要物种识别的最佳时间、飞行高度和识别模型,以期为实现该类草地主要物种的有效监测和保护提供技术支持。
1 材料与方法
1.1 研究区概况
野外研究区位于新疆乌鲁木齐市米东区柏杨河乡(东经87°52′59″~87°55′13″,北纬44°00′16″~44°01′20″),年均降水量200 mm,主要集中在4—6月,属于温带大陆性荒漠气候。该地区属于低山区,山地呈规律性起伏,平均海拔为925 m,为典型伊犁绢蒿荒漠草地分布区,伊犁绢蒿为优势种,角果藜(Ceratocarpusarenarius)为亚优势种(图1,图2)。

图1 研究区及样地设置分布示意图

图2 不同飞行高度下无人机真彩色影像
1.2 试验设计
采用大疆精灵4多光谱版(Phantom 4 Multispectral)拍摄系统进行作业,该传感器具有5个光谱范围:蓝(Blue)434~466 nm;绿(Green)544~576 nm;红(Red)634~666 nm;红边(Red edge)714~746 nm;近红外(NIR)824~866 nm。伊犁绢蒿在春季4月返青,此时角果藜处于苗期;在夏季6月,群落各植物生长旺盛,而7—8月,伊犁绢蒿有休眠现象;秋季9月,伊犁绢蒿进入花期,角果藜植物变的枯黄[15]。参照研究区内伊犁绢蒿和角果藜的生长周期,于2021年4月、6月、9月在研究区布设3条样带,样带间隔约250 m,在每条样带内分别设置5个50 m×50 m的样方,间隔50 m,共15个,每个样方设置15 m,30 m,60 m 3种飞行高度,相机沿样带方向进行拍摄。飞行速度设置为1.0 m·s-1,拍照模式为等时间拍照,拍照间为2.0 s,航向重叠率为75%,旁向重叠率为75%,采用垂直方式采集图像,获得5个单通道伊犁绢蒿荒漠草地无人机影像数据,空间分辨率分别为0.8 cm,1.6 cm,3.2 cm。参照野外实地调查数据,将伊犁绢蒿、角果藜和裸地设为识别对象。
1.3 数据处理
1.3.1图像预处理 使用大疆智图对获取的无人机影像进行影像的畸变校正、辐射校正和拼接,得到5幅单波段图像。通过人工目视检查图像质量,剔除因阵风引起变形的图像。利用MATLAB 2021和ENVI 5.3软件在无人机影像中标注识别对象,生成训练样本数据。
1.3.2特征波段筛选 获取的多光谱影像含有5个波段,而CNN模型选择3通道图像进行模型训练,为了快速高效地进行识别,从波段中选择最有效代表地物的特征、信息含量最丰富的3个波段进行组合。将5个波段每选3个波段为1组,计算该10种组合的OIF,选择OIF值最大的一组波段作为最佳特征波段组合。各波段图像中所涵盖的信息量与其标准差成正比,标准差越大,信息量就越多;图像的独立性与波段间的相关系数成反比,其相关系数越低,信息冗余度越小,其独立性越好。OIF计算公式为[16]:
式中,OIF为最佳指数因子,Si为第i个波段的标准差,Rij表示i,j两波段的相关系数且要取绝对值,n为在所有波段中选取的波段数。
1.3.3卷积神经网络识别模型建立 卷积神经网络模型基本组成部分包括输入层、卷积层、激活函数、池化层和全连接层5部分[17]。而Resnet网络是卷积神经网络发展中最具代表性的算法,该算法引入了残差学习单元,残差单元有效地解决了在深度网络中的退化问题[16],并且在不额外增加网络参数和计算量的基础上提升了模型速度和准确度(图3)。

图3 典型的卷积神经网络基本结构
依据样方大小将特征波段影像裁剪为224×224像素大小,使用MATLAB 2021b对深度学习数据标签进行制作,为避免网络堆叠过深,出现梯度消失或梯度爆炸问题,选择Resnet 18模型进行深度学习。网络初始卷积核参数设置(表1)经过5层卷积和5层池化后,经2层全连接层后输出,输出为样本的类别标签。本文学习速率设为0.001,迭代轮数为40轮。将数据将随机划分训练集、验证集、测试集,比例分别为80%,10%,10%。

表1 Resnet18网络初始卷积核参数设置
1.3.4支持向量机识别模型建立 SVM选择径向基核函数(Radial basic function),gamma参数为0.33,即为输入影像波段数目的倒数;惩罚参数(Penalty parameter)设置为100,该参数控制了样本错误与分类刚性延伸之间的平衡,分级处理等级(Pyramid levels)参数设置为0,以原始分辨率处理。按照地面照片数据,对各类地物进行目视解译,分别选取训练样本,其中伊犁绢蒿选择358个,角果藜选择206个,裸地选择453个。识别技术路线如图4所示。
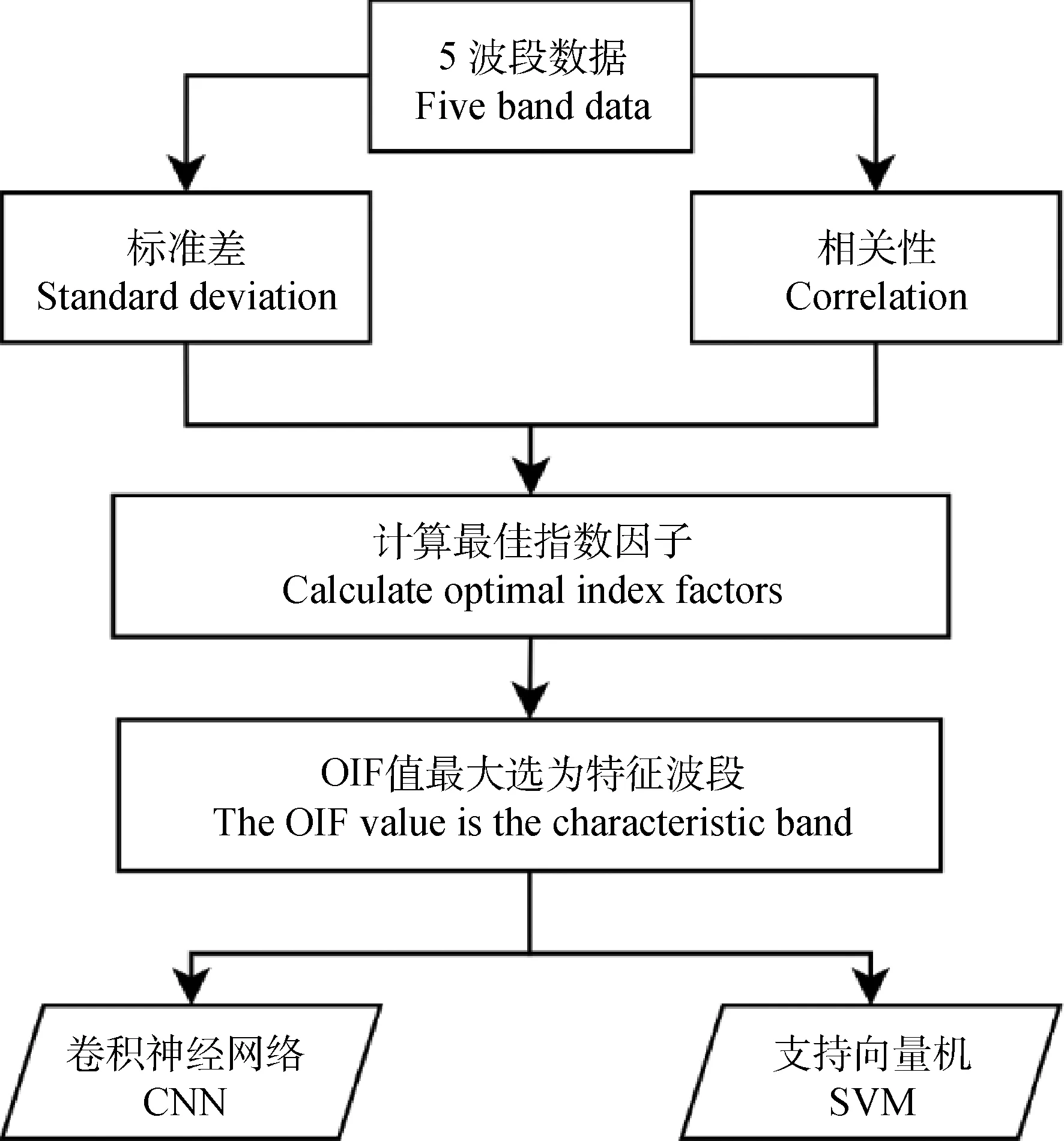
图4 识别技术路线
2 结果与分析
2.1 识别对象多光谱特性分析
由图5可知,在4月的3个飞行高度下,可见光和红边波段反射率均表现为裸地>伊犁绢蒿>角果藜;在近红外波段15 m飞行高度下表现为裸地>角果藜>伊犁绢蒿,30 m和60 m表现为裸地>伊犁绢蒿>角果藜。6月各飞行高度下,可见光波段和Red edge波段反射率均表现为裸地>角果藜>伊犁绢蒿;在15 m和30 m飞行高度下,NIR波段反射率表现为角果藜>裸地>伊犁绢蒿,60 m飞行高度下表现为裸地>角果藜>伊犁绢蒿。在9月的15 m飞行高度下,可见光波段反射率表现为角果藜>裸地>伊犁绢蒿,在30 m高度下,Red edge波段的裸地高于两种植物,而在60 m高度下表现为裸地>角果藜>伊犁绢蒿;3个高度下在Red edge波段表现为角果藜>裸地>伊犁绢蒿;在NIR波段15 m和30 m下角果藜>裸地>伊犁绢蒿,而60 m飞行高度下表现为角果藜>伊犁绢蒿>裸地。3个月份内,随着飞行高度增加,3类地物反射率逐渐降低,表现为15 m>30 m>60 m;60 m的高度下伊犁绢蒿和角果藜反射率差异较小;在可见光波段,伊犁绢蒿与角果藜反射率均表现为先升高后下降的趋势。在月份间平均反射率表现为6月>4月>9月。

图5 3类地物无人机多光谱特征
2.2 识别波段的选择
2.2.1波段标准差分析 5个波段的标准差如表2所示,在4月,3个飞行高度下标准差较大的波段为Blue,Green,Red,这3个波段相比于Red edge、NIR波段差异更大。在6月和9月,3个高度下标准差较大的波段为Red,Red edge,NIR,这3个波段相比于Blue,Green波段差异更大。波段Red在各月份和各高度下均有较大差异,并且月份内标准差随着高度增加而减小。
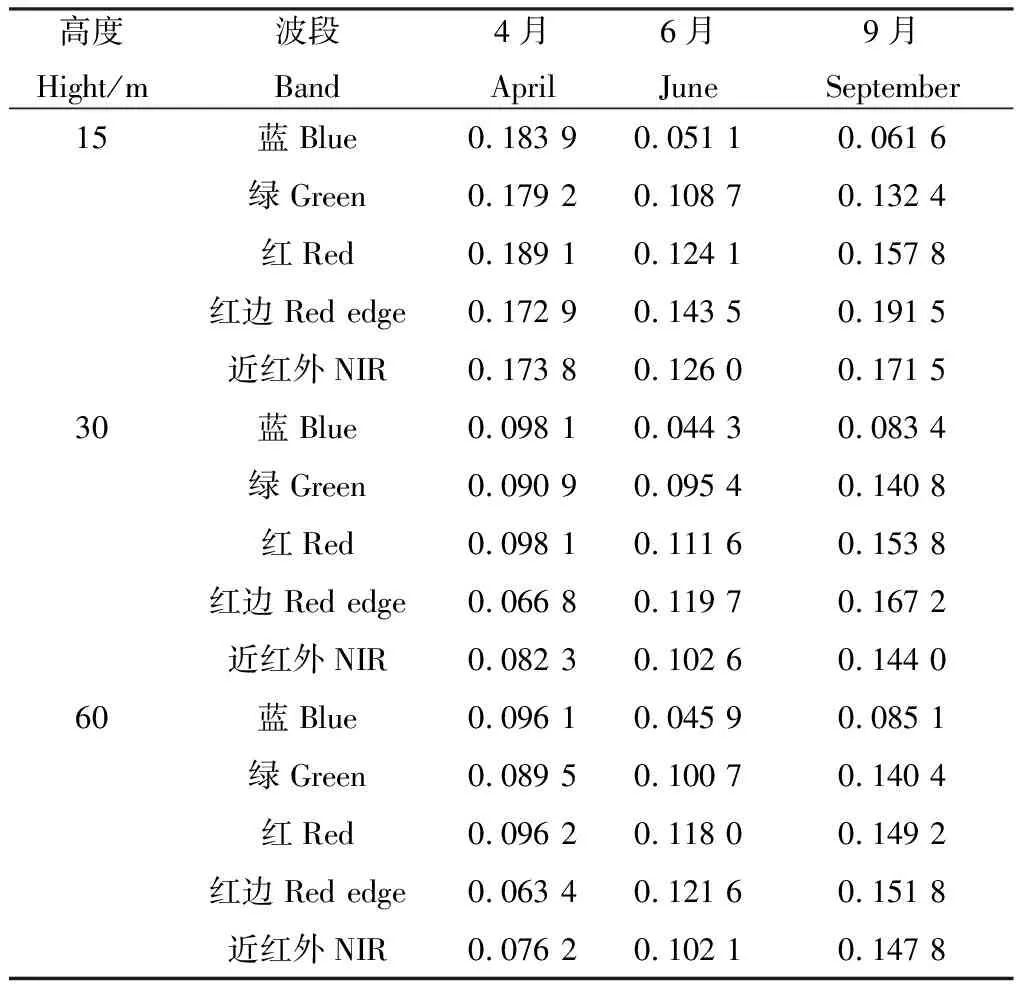
表2 无人机多光谱特征波段标准差
2.2.2波段间相关性分析 5个波段间的相关性如表3所示,在不同月份和不同飞行高度下均达到0.9以上。相比之下,在4月15 m飞行高度下Red,NIR波段间相关性最低,30 m和60 m高度下,Blue,NIR波段间相关性最低,6月各高度下的Red,NIR波段间相关性最低,9月各高度下的Blue,NIR波段间相关性最低。由于各波段间相关性较高,需要通过标准差和相关性计算出OIF值进一步筛选出特征波段。
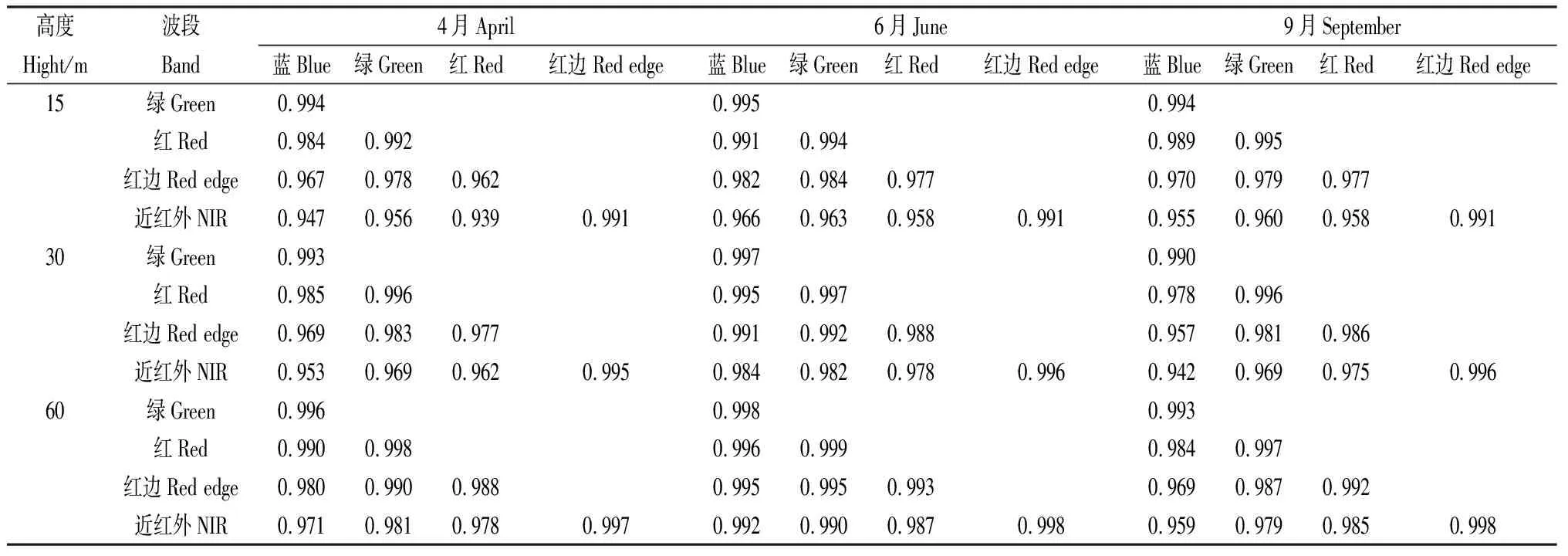
表3 无人机多光谱特征波段间相关性
2.2.3最佳指数因子 5个波段间相互组合的OIF值如表4所示。OIF值受标准差和相关性两个因素相互影响,Green,Red和NIR的波段组合在4月3个飞行高度OIF值最大,Red,Red edge,NIR波段组合在6月和9月3个高度OIF值最大,因此在对影像分类时,选择这2组波段合成RGB图像分类。OIF值在高度间表现为15 m>30 m>60 m,表明飞行高度越低,影像所包含的信息越多,识别地物间差异越大。

表4 无人机多光谱10组波段组合方式的最佳指数因子
2.3 卷积神经网络识别精度分析
分别对4月、6月、9月3个飞行高度数据建立CNN识别模型,在ResNet-18模型中测试集经过40轮训练后准确率如图6所示。4月随迭代次数增加,15 m和30 m飞行高度下准确率在前3轮上升较快,测试集在5轮时就已经取得了超过75%的精度,训练进行10轮收敛后准确率一直维持在74%~83%;60 m准确率上升较慢,在10轮前不稳定且收敛较慢,训练进行20轮收敛后精度不高,维持在66%~74%。6月的15 m、30 m与60 m测试集在前3轮准确率上升较快;15 m在5轮时就已经取得了70%的精度,训练进行5轮收敛后准确率一直在67%~78%,整体波动变化不大;30 m精度维持在67%~74%;60 m维持在62%~72%。9月的15 m,30 m与60 m准确率在前3轮上升较快,在第10轮接近最终分类结果。

图6 基于无人机多光谱CNN模型的验证精度
由表5可知,4月15 m与30 m的总体识别精度相近,均达到82%以上,60 m较低为74.52%;6月15 m,30 m,60 m的总体识别精度分别为78.8%,75.56%,72.5%;9月15 m,30 m,60 m的总体识别精度分别为78.9%,76.31%,72.79%。CNN对3类地物的识别精度在各月份内均表现为裸地>伊犁绢蒿>角果藜;随飞行高度的增加分类精度降低,识别精度表现为15 m>30 m>60 m;不同月份间识别精度表现为4月>9月>6月。分类结果见图7。

表5 无人机多光谱CNN识别精度
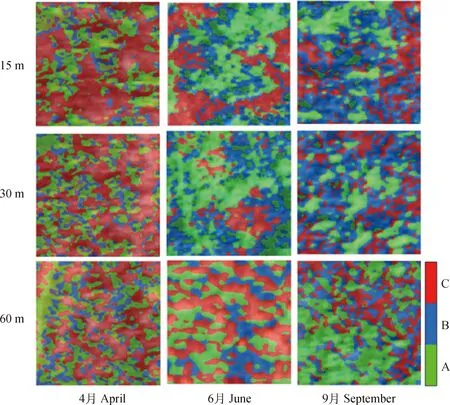
图7 无人机多光谱CNN识别结果
2.4 支持向量机识别
由图8中可知,在4月3个高度下,伊犁绢蒿错分给角果藜的样本较少,没有被错误地归类为裸地,随着高度增加被分为角果藜的数量增加;6月角果藜错分给伊犁绢蒿和裸地较多,整体精度较低;9月伊犁绢蒿错分给其他地物数量较少,裸地只有在60 m下有1个错分为伊犁绢蒿,而裸地与角果藜错分较多。
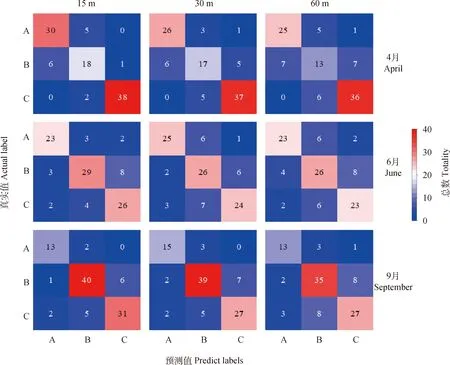
图8 无人机多光谱SVM识别混淆矩阵
由表6可知,4月在15 m和30 m的总体识别精度为86.23%和80.18%,60 m高度下总体识别精度较低为74.02%,Kappa系数分别为0.78,0.69和0.60;6月3个高度的总体识别精度分别为78.64%,75.38%和72.34%,Kappa系数为0.67,0.62和0.58;9月3个高度的总体识别精度为84.67%,81.22%和75.54%,Kappa系数为0.74,0.70和0.60。SVM对3类地物的识别精度在月份内表现为裸地>伊犁绢蒿>角果藜;不同月份间总体识别精度表现为4月>9月>6月;在不同高度下SVM模型对3类地物的识别精度随飞行高度的增加而降低,识别精度表现为15 m>30 m>60 m,分类结果见图9。
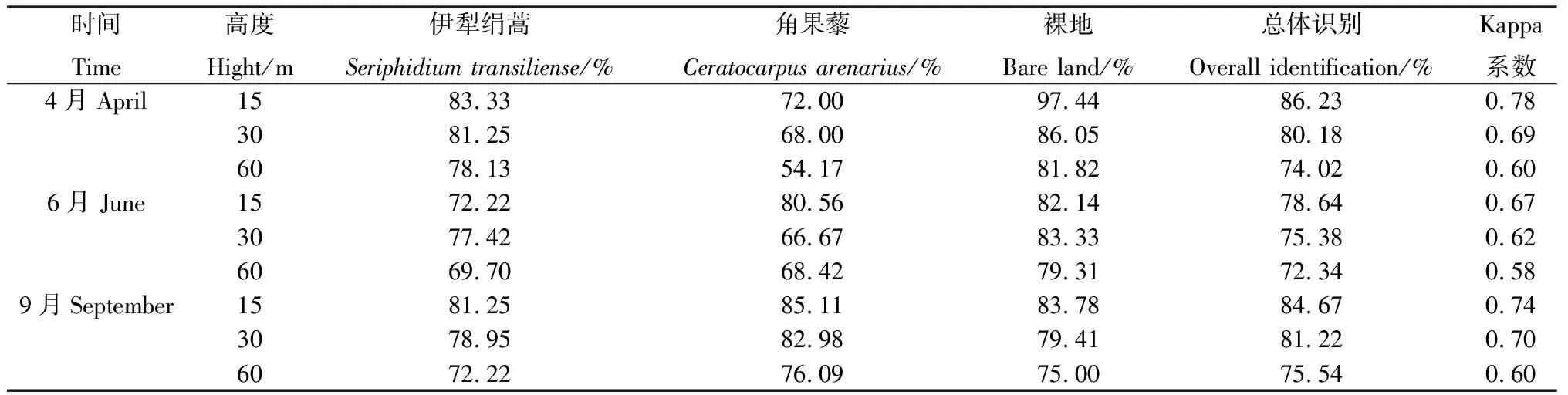
表6 无人机多光谱SVM识别精度

图9 无人机多光谱SVM识别结果
3 讨论
健康绿色植物的光谱特征受叶片色素、细胞结构、水分含量等因素的综合影响,且在可见光、Red edge和NIR 3个波段呈现不同的变化[18]。本研究对伊犁绢蒿荒漠草地地物的光谱分析发现,在可见光波段,2种植物均呈现出“低-高-低”的光谱反射率趋势,这是由于不同植物叶片内各种色素对可见光不同光谱波段的吸收具有差异所致。在可见光与NIR波段之间,反射率急剧上升,出现“红边”现象,伊犁绢蒿和角果藜反射率在Red edge波段急剧上升主要是受叶片内部构造差异的影响,随着波长进一步增加至NIR波段附近,伊犁绢蒿反射率高于角果藜,这与范燕敏等[19]和韩万强等[8]对伊犁绢蒿荒漠草地植物光谱反射率趋势的结果一致。NIR波段由于绿色植物叶肉海绵组织结构中拥有许多空腔,其具有很大的反射表面,而且细胞内叶绿体呈水溶胶状态,辐射能量大都被散射掉,形成NIR波段高反射率[20]。波段数量的增加会造成不必要的运算,因此本研究依照各地物间光谱特性的差异进行波段筛选,4月的特征波段为Blue,Green,Red,6月和9月为Red,Red edge,NIR。曹敏等利用OIF选择了Blue,Red,NIR波段进行组合[21],而徐磊利用相同的方法选择的特征波段为Green,NIR,SWIR[22],各学者所筛选的特征波段各有不同。因此,对不同的识别对象需要进行专一性的特征筛选。
识别精度在月份间表现为4月>9月>6月,是受伊犁绢蒿和角果藜生长时期间的差异影响。在4月的识别精度最高,是因为4月的伊犁绢蒿处于营养期,而角果藜处于苗期[23],其植被盖度、植株形态和反射率光谱差别大;6月的伊犁绢蒿和角果藜盖度增加,两者间的重叠度增加,导致在重叠区域的分类效果不理想,容易错分为其它类别。9月的伊犁绢蒿处于花期,两种植物间有明显的差异;但角果藜的植物变的枯黄,和裸地的可分性降低,影响识别精度。植物随物候变化,生长状况不一致,对识别精度有较大的影响,这与汪传建等和汪小钦等的识别结果一致[24]。选择植株差异较大的时期进行识别,可以显著提高识别精度。
本研究将CNN算法和SVM模型应用于伊犁绢蒿荒漠草地植物的识别中,CNN在4月获得大于80%的识别精度,SVM在4月和9月获得大于80%的识别精度,证明了将CNN和SVM应用于伊犁绢蒿荒漠草地植被的识别是可行且有效的,这与陈善雄等[25]和肖伟等[26]在识别研究的结果一致。研究发现CNN和SVM分类器在15 m的飞行高度可以较好的区分3类地物,而对象间的识别精度随飞行高度增加而降低。飞行高度增加,传感器接收到的光谱包含来自相邻像素的组合反射率。这表明反射率的变化与空间分辨率和地表复杂性,而地物的空间分辨率和反射率降低,使区分体积较小地物的难度增加[27-28]。飞行高度增加所造成的混合像元问题是影响分类精度的重要原因之一,大疆精灵4多光谱无人机在飞行高度为30 m时,空间分辨率为1.6 cm,当空间分辨率小于1.6 cm时对于伊犁绢蒿荒漠草地植物进行分类可以获得较高的识别精度。在15 m的高度下飞行1块样地需要30 min,而30 m的飞行高度获取相同面积的数据只需要7 min,并且识别精度也达到80%以上,虽然精度低于15 m飞行高度,但如果在相同时间内能获得更大面积数据,可选用30 m的飞行高度。在分类器的选择中SVM的优点是小样本、结构风险最小化、具有更强的泛化能力[29-30],从分类结果上看仍然是对伊犁绢蒿荒漠草地较好的分类器选择。CNN模型虽然比SVM模型训练时间更短,训练参数更少,但是CNN相较于SVM的识别准确率却没有提升,这说明SVM模型更适合本研究。上述结果表明本研究使用的SVM具有一定的可行性,可以在伊犁绢蒿荒漠草地地物识别中取得更好的效果。
4 结论
地物反射率随着飞行高度增加而逐渐降低,不同物候期的伊犁绢蒿与角果藜在可见光波段均表现为“低-高-低”的光谱反射率趋势。依据光谱特征差异筛选OIF,敏感波段不受飞行高度的影响,但却在不同月份间有差异,4月敏感波段为Blue,Green,Red,6月和9月为Red,Red edge,NIR。以荒漠草地植物为识别对象,建立识别模型,识别精度在不同分类方法、生育期、飞行高度和识别地物中均表现出差异,整体识别精度在分类方法间为SVM>CNN;月份间为4月>9月>6月;飞行高度下为15 m>30 m>60 m;识别对象间整体为裸地>伊犁绢蒿>角果藜。在4月15 m飞行高度下,使用SVM对伊犁绢蒿荒漠草地主要物种识别效果最佳。
