满足位移要求的偏置式双肘杆模切机构结构参数优化分析
2022-12-01王君玲李子昂高玉芝郭彩玲
王君玲,李子昂,陈 伟,高玉芝,郭彩玲
(1.唐山学院 河北省智能装备数字化设计及过程仿真重点实验室,河北 唐山 063000;2.北京理工大学 机电工程学院,北京 100018;3.盛田印刷包装机械有限公司,河北 玉田 064100)
0 引言
模切机是印后包装加工成型的重要设备,其工作原理是利用钢刀、五金模具、钢线(或钢板雕刻成的模版),通过压印版施加一定的压力,将印品或纸板轧切成一定形状。网络购物的流行和物流行业的发展,带动了纸质包装印刷行业的兴起,纸质包装需求量不断提升,市场对高效率、高质量模切机的需求量也随之与日俱增。模切机构是模切机的核心,目前主流模切机的模切机构主要为平面双肘杆机构,是单自由度复杂Ⅲ级机构。此机构依据曲柄中心与二肘杆铰接中心是否存在高度差,分为对称式和偏置式;依据肘杆两侧曲柄的夹角是否为180°,分为夹角式和非夹角式;依据曲柄位置的不同,又分为内置式和外置式[1]。此外,还有凸轮式[2]和双滑块式[3],以及便于数字控制的气液增压式[4]等创新型肘杆模切机构,而且它们都保留了增力倍数高的肘杆机械结构。模切机构的工作性能直接影响印刷产品的质量,因此,对模切机构各构件运动规律进行科学分析有助于对此装置进行优化设计,提高其性能。
刘尊义、罗勇等利用外罚函数法和BFGS变尺度法、转换机构法等对模切机的双肘杆机构进行了优化设计和运动分析[5-6]。张天轩、宋荣、李发展、赵小刚等利用三维分析软件建立的模切机肘杆机构虚拟样机进行了仿真分析,得出了该机构的运动特性曲线和杆件受力曲线[7-10]。秦培亮等采用对称布局的结构,设计了一种基于肘杆机构的双输出轴电机驱动的数控双工位卧式冲压机,并对其进行了仿真分析[11]。余光莉等基于封闭矢量法对双自由度平面混合输入机构进行了运动学仿真研究,为平面混合输入机构的运动分析提供了新思路和新方法[12]。上述研究从不同角度探讨了双肘杆模切机构的运动特性,但大多是针对一个具体结构尺寸进行分析,未能给出该机构各构件运动规律的显式表达,也未分析主要结构参数对运动规律的影响。因此,本文拟采用矢量复数法和杆长逼近约束条件法建立偏置式双肘杆模切机构的位移分析模型,从满足位移要求角度进行结构参数优化,并对优化结果进行仿真验证。
1 双肘杆机构位移求解
图1为平压偏置式双肘杆模切机构示意图。此机构由曲柄1,连杆2和8,肘杆3,4,6,7以及动平台5,导向块9和机架组成。其工作原理为曲柄1转动,通过连杆2和8带动肘杆3,4,6,7摆动,进而使与上肘杆铰接的动平台5在导向块9的引导下实现模切运动。
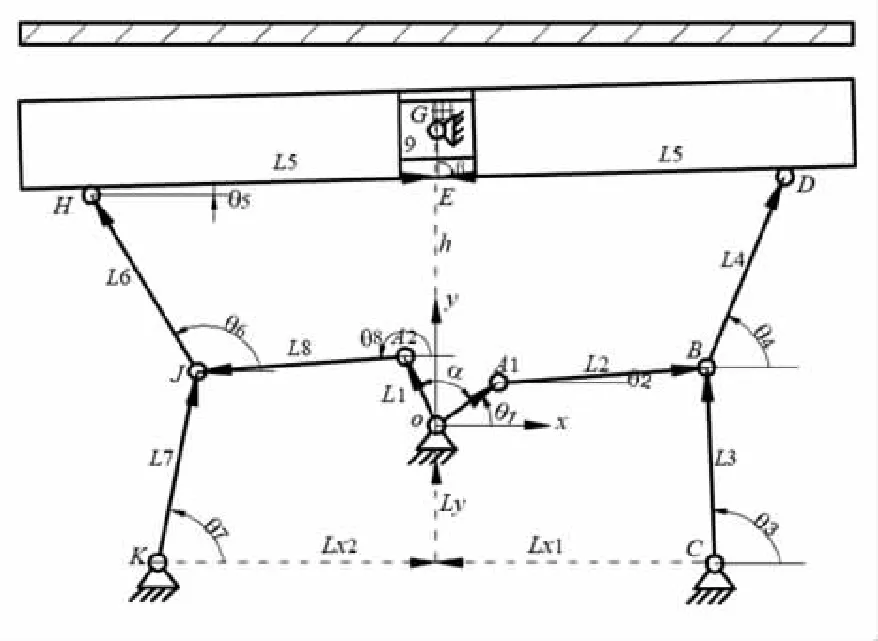
图1 平压偏置式双肘杆模切机构示意图
不失一般性,取曲柄转动中心为坐标原点,x轴平行于下肘杆的转动中心连线,建立如图1所示的直角坐标系。设L1为曲柄1的长度,L2,L8分别为连杆2和8的长度,L3,L7分别为下肘杆3和7的长度,L4,L6分别为上肘杆4和6的长度,2L5为动平台两铰接副之间的长度,E为DH的中心点,S为动平台相对于导向摆块的位移,θi分别为各个构件的角位移,α为两曲柄夹角,β为动平台DH与移动导路中心的夹角,并规定各矢量与x轴正向夹角逆时针方向时为正值。
整个机构由两个Ⅱ级杆组和一个Ⅲ级杆组组成。依据基本杆组拆分和对称性原则,建立四个封闭矢量图,对每个矢量图分别列出矢量方程,可求解相应角位移参数。
1.1 连杆和下肘杆角位移求解
连杆与下肘杆组成简单Ⅱ级杆组,与机架和曲柄分别组成矢量图OA1BCO和矢量图OA2JKO,可直接求得正解。
由矢量图OA1BCO列矢量方程(1),将其展开得方程组(2),可求解θ2和θ3。
(1)
(2)
令A=(-Lx1+L1cosθ1)2+(Ly+L1sinθ1)2+L22-L32,
B=2L2(-Lx1+L1cosθ1),
C=2L2(Ly+L1sinθ1),
可得:
将其带入方程组(2),可求得θ3。
同理,由矢量图OA2JKO可列出矢量方程(3),将其展开得方程组(4),可求解θ8和θ7。
(3)
(4)
令AA=[-Lx2+L1cos(θ1+α)]2+[(Ly+L1sin(θ1+α)]2+L82-L72,
BB=2L8[Lx2+L1cos(θ1+α)],
CC=2L8[Ly+L1sin(θ1+α)],
可得:
将其带入方程组(4),可求得θ7。
1.2 上肘杆角位移和动平台位移求解
上肘杆与动平台、导向块组成复杂的Ⅲ级杆组,其解析式为含三角函数的非线性方程组,需建立约束条件,用迭代法求解。对于高级机构的求解,主要有回路法、型转换法、逼近约束条件法等。本文采用虚拟原动件与杆长逼近约束条件法进行求解。首先在铰接点B和J位置已经确定的条件下,假设导向块为原动件(即认为其转角已知),将含有三副构件的动平台拆分成两部分,分别与原动件、上肘杆和机架建立两个封闭矢量图,按照Ⅱ级杆组方法得到上肘杆角位移与动平台位移的求解表达式,然后初给一个导向块转角值,则可分别得到D点和H点的坐标值。实际机构中D点和H点距离始终保持不变,因此按照‖DH-2L5‖<ε1(误差精度)的约束条件(杆长逼近)进行迭代求解,同时还需要满足两个矢量图求解得到的两个相对位移S理论上相等的约束条件,即‖SD-SH‖<ε2(误差精度)。
由矢量图OA1BDEGO可列矢量方程(5),将其展开得方程组(6),在假设θ5已知情况下求解θ4和SD。
(5)
(6)
令Y=L1sinθ1+L2sinθ2+L5sin(θ5+π)-h,
X=L1cosθ1+L2cosθ2+L5cos(θ5+π),
c=-L4,
可得:
D点的坐标为:
令M=X2+Y2-L42,
N=Xcos(θ5+β)+Ysin(θ5+β),则D点相对位移为:
而事实上,丝绸具有在医疗、美容、保健等方面的独特功效和在审美、收藏等方面的文化魅力。在新的科学技术蓬勃发展的背景下,丝绸企业应重视丝绸产品的创新,切实推进桑蚕茧丝绸的综合利用开发。此外,结合当下兴盛的“工业旅游”,丝绸企业借鉴“前店后厂”的模式,完善丝绸体验区的建设,全方位展示丝绸多功能的形象,打破思维僵局,向世界传递丝绸新的消费观念。
同理,由矢量图OA2JHEGO可列出矢量方程(7),将其展开得方程组(8),可求解θ6和SH。
L1ei(θ1+α)+L8eiθ8+L6eiθ6+L5eiθ5+
(7)
(8)
令YY=L1sin(θ1+α)+L8sinθ8+
L5sinθ5-h,
XX=L1cos(θ1+α)+L8cosθ8+L5cosθ5,
cc=-L6,
可得:
H点的坐标为:
令MM=XX2+YY2-L62,
NN=XXcos(θ5+β)+YYsin(θ5+β),则H点相对位移为:
约束条件为:
‖DH-2L5‖<ε1,
‖SD-SH‖<ε2。
2 约束条件建立
两曲柄夹角ɑ<180°的夹角式双肘杆模切机构在工作过程中,D点与H点有一个高度差ΔD,动平台有一定的倾斜角度,自前至后,对纸板进行剪切式施力模切,此类型机构可有效克服机构的死点位置,避免“闷车”,适用于对大幅面厚纸、瓦楞纸轧切的模切机机型[1]。本设计应企业需求,采用此类型模切机构。为减少动平台“上下起伏、左右摇摆”的幅度,一般需限定动平台转动角度,为此,以双肘杆模切机构一个运动周期内动平台转角θ5和D点沿y轴方向最大行程无限接近理想值为目标函数,定义目标函数为:
双肘杆机构左右两部分的构件尺寸是对称的,即图1中L2=L8,L3=L7,L4=L6,Lx1=Lx2,选择曲柄长度L1,连杆长度L2,下肘杆长度L3,上肘杆长度L4,动平台长度的一半L5,即X=(L1,L2,L3,L4,L5)T作为优化设计变量。
如果曲柄夹角过小,则机构振动稳定性能差,影响模切质量,不利于高速模切。优化设计依据企业需求,限定165π/180<α<π,此时θ1=θ2,α=π-2πθ1,可作为一个判断语句加入程序中。
为了使机构增力达到最大,当动平台处于上限位置时上肘杆和下肘杆应处于近似铅垂位置,曲柄与连杆处于近似水平位置,为此限定θ3>π/2,-15π/180<θ2<15π/180。在动平台摆角小的情况下,取β=π/2,再依据曲柄存在条件,列约束函数如下:
g1(X)=L1-L2<0,
g2(X)=L1-L3<0,
g7(X)=Ly-L3<0,
3 实例验证
依据企业生产对模切机构基座尺寸的需求,给定Lx1=Lx2=405 mm,Ly=230 mm,h=300 mm,β=90°,-0.45°<θ5<0.45°,使用Matlab双层for循环语句和if判断语句等编制运算程序,进行参数优化,得到L1=60 mm,L2=323 mm,L3=265 mm,L4=212.25 mm,L5=384 mm,α=170°。动平台的转角变化规律如图2所示,其最大摆角为0.366°;垂直位移变化规律如图3所示,最大行程为78 mm。图4和图5分别是上肘杆和下肘杆的角位移变化曲线。

图2 动平台转角变化曲线
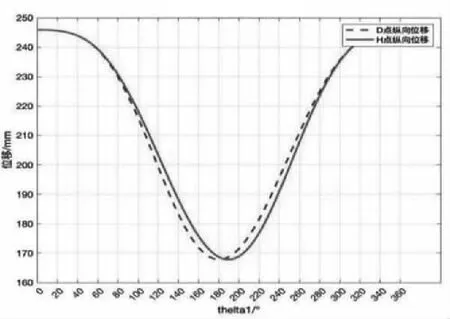
图3 动平台垂直位移变化曲线
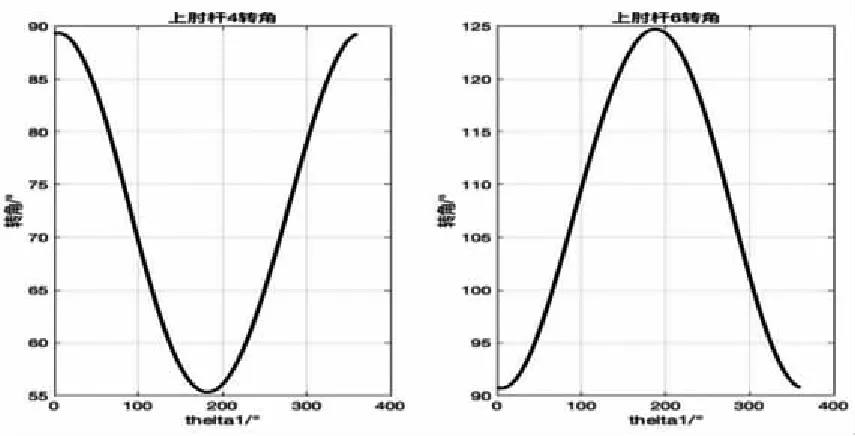
图4 上肘杆角位移变化曲线

图5 下肘杆角位移变化曲线
图2-5的横坐标均为曲柄的转角,0°对应曲柄与x轴正向重合位置。当曲柄OA1转角为5°时,动平台处于最高位置,其转角为零,上肘杆角度分别为89.33°和90.69°,下肘杆角度分别为95.09°和84.91°,连杆的转角位置分别为5.05°和174.95°,均满足工作要求。
根据优化后的构件尺寸,得到Solidworks实体模型及实物,分别如图6和图7所示。动平台建模后运动仿真结果如图8和图9所示,与理论计算结果图2和图3基本一致。用优化后的构件尺寸做成的实际产品性能指标能达到预期要求。
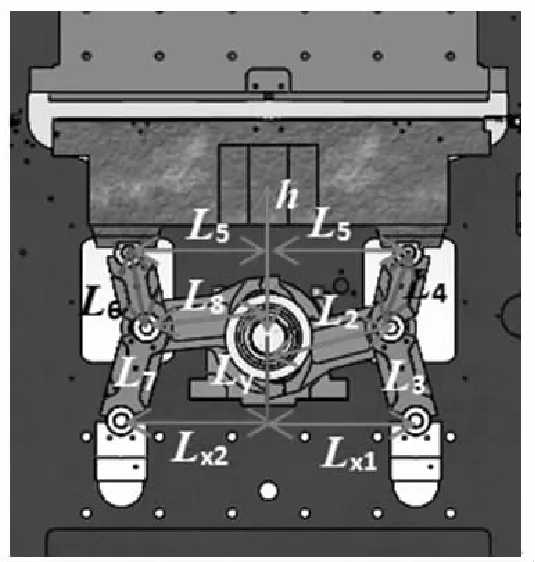
图6 三维模型

图7 实物图

图8 动平台实体建模的仿真转角变化曲线
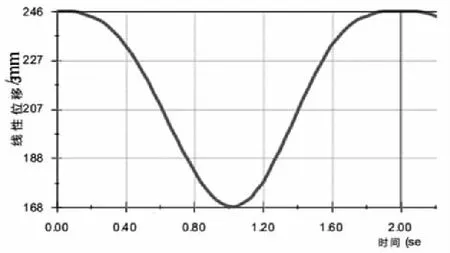
图9 动平台实体建模的仿真垂直位移变化曲线
4 结论
本文结合企业实际需求,运用矢量复数法和杆长逼近约束条件法建立了偏置式双肘杆模切机构各构件位移的显式表达,以一个运动周期内动平台转角和D点沿y轴方向最大行程无限接近理想值为目标函数,从曲柄存在条件、机构在工作过程中对肘杆和工作台位置要求的角度出发建立约束函数,运用Matlab编程求解,得到符合要求的各构件尺寸。依据优化后的尺寸进行实体建模和运动仿真,仿真结果与理论计算结果基本一致,由此验证了所建函数与计算程序的正确性。研究成果可为此机构的动力学分析提供理论基础。