无人机倾斜摄影测量技术在道路抢通中的应用
2022-12-01张秦孟新伟曹程
张秦 孟新伟 曹程
0 引言
我国是世界上自然灾害最严重的国家之一,自然灾害种类多、分布范围广、发生频率高,严重影响了经济发展和民生改善。在处置自然灾害的过程中,顺利抢通道路一方面有利于及时、有效开展各项应急救援工作,另一方面对运输各种救援物资、抢救生命、展开灾后重建等工作也具有重要作用。随着科技的发展,无人机倾斜摄影测量技术得到了越来越广泛的应用,通过无人机获取的影像数据,可以生成灾害现场的三维模型,通过模型能够全面了解灾害现场,及时做出相应救援方案,并对抢通过程进行全过程控制。由此可见,深入研究并分析无人机倾斜摄影测量技术能够全方位了解灾害现场,对顺利抢通灾区道路具有一定的现实意义。
1 无人机倾斜摄影测量技术概述
1.1 技术特点
无人机具有方便快捷、机动灵活的特点,通过超低空倾斜摄影,可以从多个角度获取影像数据,配合控制点或影像POS 信息,可以自动生成点云及网格模型、单体化三维模型、DEM 模型等,基于三维模型可对任意点线面体进行量测或计算,快速获取空间属性信息,精度可以达到亚米级,同时可对影像信息的数据深度挖掘,实现对灾害现场的全方位了解[1]。
1.2 适用场景
基于无人机倾斜摄影测量技术特点,在处置灾害现场的过程中,通常可用于以下场景:
前期现场勘察:快速了解现场环境,获取地理信息数据及灾害相关情况,为制定道路抢通方案提供依据及数据支持。
中期灾害评估:结合三维模型,测量灾害相关数据,统计受灾情况,对灾害进行分析,评估灾害的等级。
后期灾害监测:对重点区域进行实时监测,以确保道路抢通中人员及机械的安全,同时对受损道路及时进行修复,以保证道路的畅通。
2 基于低空摄影测量的实际应用
2.1 前期现场勘察
在现场前期勘察中,主要任务是获取现场地形、几何尺寸、受灾情况等相关信息,以便为实施道路抢通提供依据。为验证无人机倾斜摄影测量技术在前期勘察中的实际应用效果,以隧道训练场为试验对象,进行了三维模型生成、尺寸测量及方量计算三方面的试验。
2.1.1 三维模型的生成
基于软件操作性、生成模型精度等因素的考虑,采用A 公司的photoscan 进行三维模型的生成。生成三维模型的主要处理流程为:影像数据获取→导入图片→对齐图片→建立密集点云→生成网格模型→映射纹理→导出DEM模型。
2.1.1.1 数据获取及图片导入
本次试验利用十字型四轴无人机对隧道训练场进行了360 °环形航拍,共采集31 张现场影像图片,图片数据格式为JPEG,大小均在4~5Mb 之间。所有图片影像导入软件后,按照地理位置在模型中进行展示,见图1。

图1 导入图片后的模型图
2.1.1.2 对齐图片
根据图片影像坐标、高程等信息,对导入的图片进行对齐,并按照相似度对图片进行排列,删除相邻图片重复度少于50%的图片,同时生成稀疏点云模型。生成过程中精度可根据需要进行调整,所调整的精度不同,显示的效果也有所不同,精度越高,效果越好,但生成的时间也相对较长。本次试验选择的精度为高精度,共计用时约15 分钟,对齐后的图片见图2。

图2 对齐图片后影像模型图
2.1.1.3 生成点云及网格模型
图片对齐完成后,即可通过内插法建立密集点云模型,并根据点云模型生成相应的网格模型;生成过程中可以根据需要选择精度要求,本次试验生成点云及网格模型选择的精度均为中等精度,加密点云共计用时约15 分钟,生成网格模型共计用时10 分钟。生成模型的图片见图3、图4。
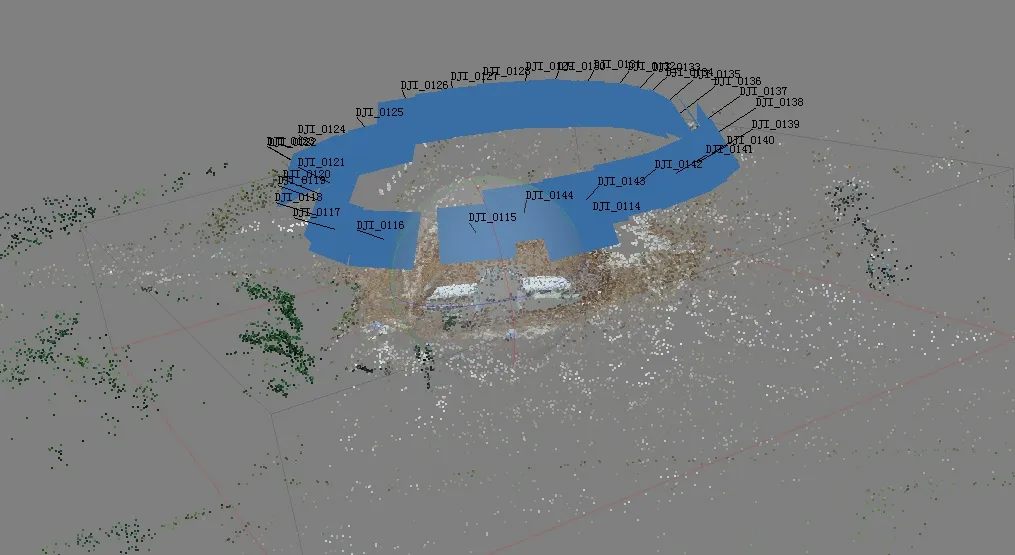
图3 生成点云模型图

图4 生成网格模型图
2.1.1.4 映射纹理及生成DEM 模型
生成网格模型后可进行纹理的映射和DEM 模型的生成,映射过程中需设置映射模式、混合模式及纹理大小三个参数。本次试验选择的是正射影像,混合模式选择的是“镶嵌(默认)”,纹理大小选择“4096(默认)”共计用时约5 分钟。生成DEM 模型过程中,需设置坐标系统、数据及相关尺寸等。本次试验采取的是WGS84 坐标系统,总尺寸采用的是2084*2203 像素,生成后的模型见图5、图6。
图5 映射纹理模型图
图6 DEM 模型图
此次生成三维模型共用时约45 分钟,经对比现场照片,模型中有效数据范围内的地形与现场一致,见图7,有效还原了现场的地形,通过模型能够全面了解现场情况,为下一步抢通道路提供支持。

图7 模型和现场对比图
2.1.2 尺寸测量
尺寸测量的试验以隧道训练场中模拟隧道为对象进行比较;经对模型中相关尺寸进行测量,洞门宽6.11m,混凝土墙身宽0.509m,墙身高2.85m;现场实际尺寸为洞门宽6.4m、墙身宽0.4m、墙身高3m,实际误差均在0.3m 范围内,能够满足完成大型任务的要求。模型测量图片见图8。

图8 生成模型尺寸测量图
2.1.3 土方方量计算
土方方量计算是无人机应用中常见课题,主要有两种方法:一是断面法,常用于较为规则的土堆;通常利用公式进行计算,具体步骤为首先根据各个点的坐标计算出上下底面的面积(或利用cad 测量出面积),而后用公式V=(S 顶+S 底+S 顶*S 底)*H/3 计算土堆的体积。二是建模法,常用于滑塌体等不规则土体;主要利用前后两次DEM 模型体积差进行计算,灾情发生前的模型可根据卫星图数据生成,灾情发生后的模型可由三维建模软件根据测量影像生成(本文采用的是A 公司的photoscan),见图9。

图9 导出后的三角网模型
在本次试验中,以隧道训练场中土堆为对象进行土方方量比较,采取断面法进行计算。经对模型进行测量,底面积为767.88m2,顶面积为50.7m2,平均高度为7.1m,套用公式后体积为2404.2m3;经对现场土方采用全站仪进行测量,方量约为2360m3,考虑土方测量误差因素,模型中测量的方量较为准确,可以作为参考数据使用。
2.2 灾害评估及监测
发生自然灾害掩埋道路后,利用无人机倾斜摄影测量技术构建的灾害现场三维模型,不仅可以获取空间属性、建筑物受损情况、道路掩埋情况等信息,还可以利用模型计算出滑坡的影响范围,预测泥石流的发展方向;同时结合影像数据可以综合分析建筑物损坏情况、灾区道路受损情况和通达情况,预测发生灾害后建筑物大致位置,以便快速、安全的进行道路抢通,从而达到快速营救被困人员的目的[2]。
为验证无人机倾斜摄影测量技术在灾害评估和监测中的实际应用效果,以训练场滑坡体为试验对象,进行了三维模型生成、空间属性信息及边坡稳定性分析三方面的研究,见图10。

图10 现场滑坡体三维模型
2.2.1 获取空间属性信息
无人机对现场两处滑坡体共拍摄了18 张照片影像,利用软件(photoscan)生成了现场的三维模型。通过对三维模型进行尺寸量测及边坡计算,滑坡体总的长度为34.6m(其中大的滑坡体长度为18.9m,小的滑坡体长度为15.7m),大滑坡体宽度为29.8m,小滑坡体宽度为14.4m,大滑坡体高度为7.1m,小滑坡体高度为3.6m,大滑坡体临路一侧边坡坡度为1∶1.46,小滑坡体临路一侧边坡坡度为1∶1.3;通过对三维模型进行面积量测和方量计算,大滑坡体占地面积为581.04m2,方量为2249m3,小滑坡体占地面积为226.08m2,方量为450.14m3。
2.2.2 边坡稳定性分析
经对三维模型数据和现场图片进行分析,现场模拟道路由南向北依次有两处滑坡体,边坡高度由南向北逐渐升高,均为1 级边坡且中间无平台,坡面角为30 °~50 °,坡体主要由松散土石及堆积土组成,土质为黄土。现场所在地区属亚热带季风气候,四季分明、冬干春旱,春季气温回升稍快,秋季降温迅速,每年降水分布不均匀,主要集中在5~10月,降水量约占全年的70%~80%。
滑坡体土质均为黄土,局部夹杂风化岩石,黄土质地粘重,遇水后土质松软呈黄泥状,无雨水时干燥较快,局部会出现龟裂现象;边坡坡顶较平整,遇水后水流易通过松散表面下渗,从而导致滑坡体内部含水量较大,边坡表面土质较为松散,遇水后边坡可能发生滑塌;但滑坡体四周的边坡坡度均较缓,下部体积较大顶部体积较小,下部能够较好的起到支撑作用,从而滑坡体总体较为稳定。
2.2.3 边坡稳定性监测
虽然边坡总体较为稳定,但为确保道路抢通的顺利实施,应做好边坡的监测工作,边坡监测的重点在于坡顶和坡脚的变化,因此对边坡的坡顶和坡脚均布置了控制点,定期利用无人机进行监测,并对滑坡体尺寸进行记录,以监测边坡变化情况,见图11。

图11 设置控制点后的滑坡体三维模型
3 应用效果分析
首先,本次试验以隧道训练场为对象进行拍摄,拍摄高度约在10m 左右,采取了360 °环形拍摄,共拍摄31 张图片,平均每个面将近8 张图片,生成的模型较为清晰,效果较好。试验中为保证模型效果,拍摄照片较多,经对图片生成的模型进行比较,在实际应用中,对单个对象平均每个面拍摄4~5 张图片即可保证模型生成的效果。
其次,发生的灾害不同,灾害区域的环境及地物也有所不同,随着灾害区域地物的增多,对无人机拍摄角度及高度就有了更高的要求。所要拍摄的地物越多,无人机的高度就越高,拍摄的范围越广,配合多角度的图片影像,生成的模型才会与现场实际更为接近,利用模型进行分析的效果才会更好。
第三,利用无人机倾斜摄影测量技术建立的三维模型,能够真实反映灾害现场实景,从不同的视角进行观察,从而对灾害现场进行综合判断。在道路抢通过程中,可以利用模型选择最佳行动路线,并对灾害发展态势进行预测;在道路保通过程中,可以利用模型对重点路段进行监测,以确保道路的畅通。
4 应用局限
无人机倾斜摄影测量技术能够为道路抢通全程提供高效的地理服务,但在应用的过程中仍存在一些局限性,主要包括以下方面:
一是无人机的飞行对天气条件有一定要求,天气恶劣的情况下通常不能飞行,但自然灾害现场,天气状况普遍较差,因此给无人机的作业提出了较高要求。
二是构建三维模型时,所需图片影像较多,且对图片质量要求较高,图片尺寸相对较大,处理速度相对较慢,对计算机硬件要求较高。
三是在无人机进行倾斜摄影时,由于拍摄角度的局限性,生成的模型细部环境表达不够准确;例如在本次试验中,生成的三维模型中就出现了钢拱架错位、肢解等问题,因此在对现场进行决策分析时需结合现场图片进行。
同时,在获取数据、生成三维模型中,还存在以下问题有待改进:1)利用无人机采集数据的过程中,受天气因素影响较大。2)生成灾害现场模型所需照片影像较多,用时较长。3)三维模型的局部细节存在错位、肢解、空洞等现象,需结合现场照片进行分析。
5 结语
利用无人机倾斜摄影测量技术能够快速生成灾害现场三维模型,并提供准确的空间属性信息,以便对灾害现场进行综合判断,快速制定道路抢通方案,并对抢通道路实现全过程控制,实现从数据获取、任务分析、任务处置的全方位指挥。