一种模块化可更换抓捕装置设计
2022-11-30高艳慧蔺相飞信义兵万志恒
高艳慧 谭 庆 蔺相飞 信义兵 万志恒
(1.湖南国防工业职业技术学院,湘潭 411207;2.武汉高德红外股份有限公司,武汉 430071)
在轨维护和维修、在轨加注、在轨功能扩展和软件升级等在轨服务任务,日益成为我国卫星发展的重要任务[1-4]。空间对接机构用于实现两个航天器之间的多次连接、保持连接和分离。捕获锁紧装置是对接机构的重要组成。现有的几种对接机构存在质量体积大、结构复杂以及驱动动力数量多等缺点[5-8]。本文在前人研究的基础上,提出了一种体积小、质量轻、使用一个动力源的模块化可更换捕获锁紧装置。
1 工作原理
1.1 结构组成
抱合锁紧装置的底板与舱体面板固定连接,左右对称的限位槽通过螺钉固定在舱体面板上。如图1所示,抱合锁紧装置由蜗轮、蜗杆、蜗杆座、电机、不完全齿轮1、齿轮轴、滑动座、不完全齿轮2、锥齿轮1、摆杆、锥齿轮2、导引块、锥齿轮3、直齿轮、抱合爪、摇摆座、固定座、弹簧阻尼器、螺母以及防跳销等组成。
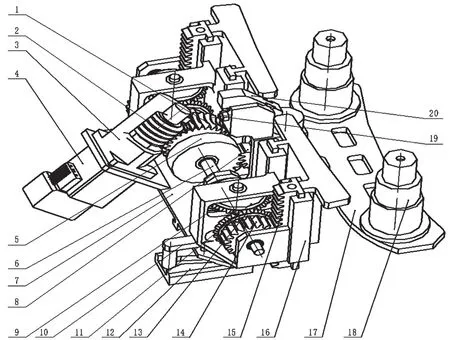
图1 抱合锁紧装置结构
1.2 安装关系
固定座、导引块以及弹簧阻尼器通过螺钉固定安装在舱体面板上。滑动座通过T形槽安装在固定座上,可沿固定座的T形槽前后移动。摆杆和摇摆座通过螺钉固定连接在一起。摆杆通过安装轴和轴承套接在滑动座的安装孔内。摆杆的前端圆柱凸起插入导引块的导引槽。当摇摆座随滑座一起前后运动时,摆杆和摇摆座在导引槽的带动下能沿安装孔转动。直齿轮2和直齿轮通过螺钉固定连接在一起。锥齿轮2和锥齿轮3通过安装轴套接在摇摆座上,且相互啮合。电机和蜗杆座通过螺钉固定安装在滑动座上。蜗杆一端通过轴承套接在蜗杆座的安装孔内,另一端通过联轴器与电机主轴固定连接。齿轮轴通过轴承套接在滑动座的安装孔内,可绕其安装孔转动。锥齿轮1、不完全齿轮1以及蜗轮均通过平键固定安装在齿轮轴上。锥齿轮1与锥齿轮2的齿面相啮合。不完全齿轮2通过轴承套接在滑动座的安装孔内,且齿面与固定在固定座上的齿条相啮合。抱合爪通过T形槽安装在摇摆座上。抱合爪上的齿条结构与直齿轮啮合,当直齿轮转动时,可带动抱合爪沿T形槽上下滑动。防跳销套接在滑动座的方孔内,尾端与螺母固定连接。在防跳销上套接有一截圆柱弹簧。该圆柱弹簧一端与防跳销接触,另一端滑动座接触,始终有将防跳销顶出滑动座的趋势。该趋势被防跳销尾端的螺母所限制。
1.3 动作原理
工作时,电机正转带动蜗杆、蜗轮、不完全齿轮1以及锥齿轮1依次转动。在蜗轮和不完全齿轮转动51°以前,不完全齿轮1将带动不完全齿轮2转动。不完全齿轮2与固定座上固定的齿条相啮合后,将带动整个滑动座向前移动,使固定座向前运动,将法兰姿态归正。固定座向前移动的这一段距离,摆杆和摇摆座受到导引块上导引槽的作用将发生小角度偏转,使抱合爪与法兰的正接触面积达到最大。当蜗轮和不完全齿轮1转动超过51°且继续转动时,不完全齿轮1的圆柱面与不完全齿轮2的凹面相接触。此时,不完全齿轮1继续转动时不完全齿轮2将不再发生转动。蜗杆带动蜗轮、不完全齿轮1、锥齿轮1、锥齿轮2、锥齿轮3以及直齿轮依次转动。直齿轮将通过抱合爪上的齿条结构带动抱合爪向下运动,将法兰压紧在滑动座上。在抱合爪带动法兰向滑动座运动时,固定在固定座上弹簧阻尼器将对法兰的运动进行缓冲,防止产生较大的刚性碰撞[9]。
2 仿真结果及分析
应用刚体动力学仿真软件建立如图2所示的刚体动力学仿真模型。弹簧采用软件自带的模型,对舱体面板、导引快与大地施加固定副,活动座与舱体面板施加滑动副,摇摆座与滑动座施加旋转副,蜗轮和不完全齿轮与滑动座施加旋转副,其余各齿轮分别与摇摆座施加旋转副[10-12]。在无重力条件下进行仿真,两两接触的零件施加接触副,各刚体接触面摩擦系数按材料的不同设置为0.05或0.10不等。

图2 对接机构多刚体动力学模型
将蜗杆转速设置为750 r·min-1,仿真结果如图3所示。抱合爪在下压过程中的最大速度为-51.4 mm·s-1,整体上来说速度较为平稳,不会对目标卫星造成较大扰动[13-15]。
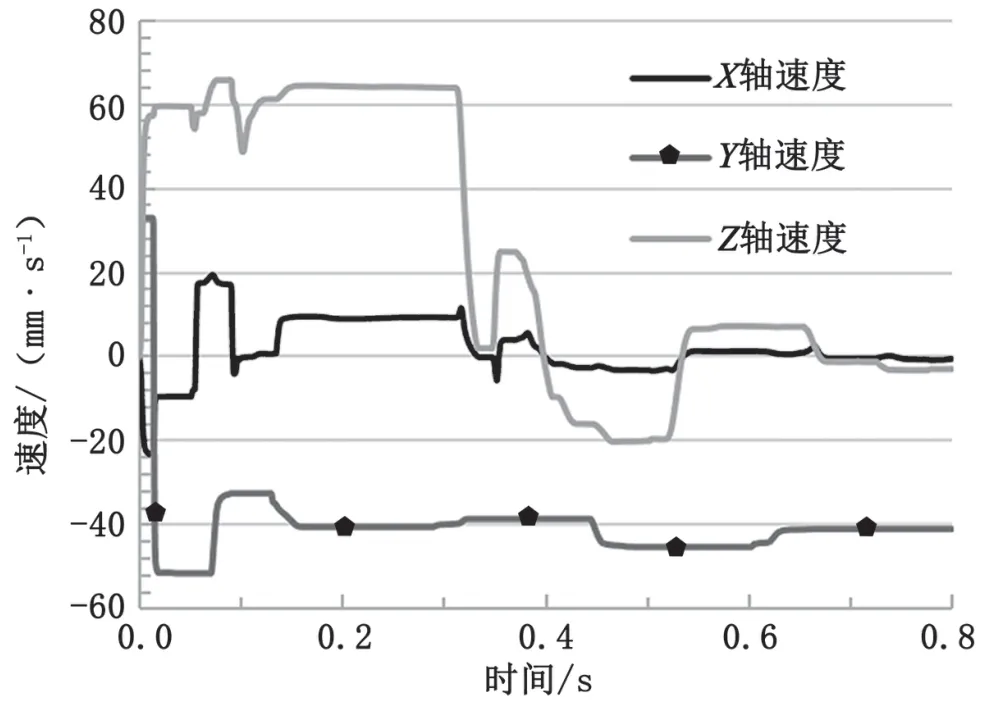
图3 抱合爪速度-时间曲线
摇摆座进行姿态归正的时间为0~0.4 s,在此过程中摇摆座最大转动角速度为40 °·s-1,速度较低且转速无较大波动,满足设计要求[16]。
3 结语
在前人研究的基础上,文章提出了一种模块化的抓捕装置方案,装置质量仅为1.4 kg。对方案进行简单的刚体动力学仿真分析,结果表明方案能够实现对空间卫星法兰的抱合归正和下压锁紧两个功能。该装置结构简单,一个电机就能够完成多个动力输出,结构可靠,具备进行工程化的理论基础。
