一种便捷型一体化植树机设计及分析
2022-11-30李园奇万文涛徐袁宏曾右鹏
李园奇 万文涛 徐袁宏 李 雯 赵 妍 曾右鹏
(重庆机电职业技术大学,重庆 402760)
在日渐严重的沙漠环境下,荒漠化已经不再是一个单纯的生态环境问题,而是演变为经济问题和社会问题,给人们带来贫困和社会不稳定。沙漠化给生态环境和社会经济带来了极大危害,因此如何有效治理荒漠化一直是世界性难题。2019年2月26日,《联合国防治荒漠化公约》[1]第十三次缔约方大会在鄂尔多斯举行,肯定《联合国防治荒漠化公约》2018—2030战略框架的重要意义,鼓励各国采取行动设定履约自愿目标,在2030年之前实现土地退化零增长。可见,防沙、治沙成为人类急需解决的重要任务。但是,人工植树需要大量的人力物力,效率较低,无法满足日益发展的社会要求。
目前,市面上的植树机种类很多。植树机的关键在于如何挖坑,所以市面上的植树机重点在挖坑。按动力的链接方式分类,它主要分为手提式挖坑机、牵引式挖坑机、悬挂式挖坑机和自走式挖坑机[2]。手提式挖坑机的均价在300~1 000元,挖坑机结构紧凑,机体与汽油发动机装配成整体,动力强劲有力,外形美观,操作简单易上手,劳动强度低,省时省力,适宜于拖拉机不能通过的复杂山地、沟壑丘陵地区,且体积小,方便携带,重量较轻,挖坑效率高。但是,该类挖坑机不附带种苗机构,功能单一,不能自动,对劳动力需求较大。悬挂式挖坑机均价在3 000~9 000元。这种植树机与拖拉机为三点悬挂,最大开沟深度可达30 cm,但需要大功率拖拉机作牵引动力,体积大,笨重,不灵活,操作较为困难。
鉴于对市面上植树机的调查,多数人对植树自动化、便捷化提出了自己的观点。陈丽专发明了一种自动植树机,实现了植树机自动挖坑的功能[3]。此外,该装置旋转托盘上附有若干个夹持单元夹住树苗,通过第三电机驱动凸轮推动助推块,使投放单元可以准确地将树苗投放到树坑中,提高了植树效率,降低了成本。王玉环发明一种植树机挖坑装置,转动杆的表面固定连接有绞龙叶片,远离电机的一端固定连接有钻头,整个挖坑装置可上下移动,快速定位钻孔[4]。漆向军[5]等发明了一种沙漠植树机,采用履带底盘驱动,很好地解决了在沙漠中行进时车轮凹陷的问题。廖伟平等发明的车体式植树机,行车方便快捷,钻孔覆土一体化,采用夹苗臂机械爪,但操作困难,在沙漠地区行车时沙尘飞扬[6]。
综上所述,设计的植树机优化了市面上现存的植树机的不足,成本低,精巧便捷,能全自动化操作,保证树苗存活率,在沙漠地区行进自如,解决了市面上沙漠植树时植树机存在的缺陷,对治理沙漠意义重大。
1 机械说明
1.1 机械结构的设计
种植机由履带式底盘、一体化多功能种植机构、树苗传送机构、覆土机构以及浇水储水装置组成,可以自动完成打洞、分苗、种植、覆土、浇水、定位以及巡航功能,具体结构及工作原理如图1所示。

图1 种植机
1.1.1 履带式底盘
两侧履带轮都采用独立电机驱动,在保证动力稳定输出的情况下,可以通过电机的差速转动实现原地转弯,灵活性极佳,如图2所示。在沙地应用时,履带与地面接触面积大,单位压力小,下陷小,附着能力强,行驶通过能力强。

图2 履带式底盘
1.1.2 一体化多功能种植机构
该结构由两个电动推杆、一个套筒和挡板组成,如图3所示。套筒底部呈倒三角形,且安装有挡板。套筒与1号电动推杆连接,挡板与2号电动推杆连接。套筒底部呈倒三角形,接触面积小,压力大,以便套筒深入沙土。整个种植机构由电动推杆1带动实现下压挖坑,随后2号电动推杆带动挡板打开,撑开沙土。

图3 一体化多功能种植机构
1.1.3 树苗传送机构
该机构由置苗框、电机、滑轨和齿轮齿条组成,如图4所示。每个置苗框内各放一株树根向下的树苗,待种植机构完成挖坑工作后,电机驱动齿轮齿条实现置苗框的直线移动,使置苗框与载物板的通孔对齐,随后树苗通过套筒垂直落入由种植机构挖好的沙坑中。
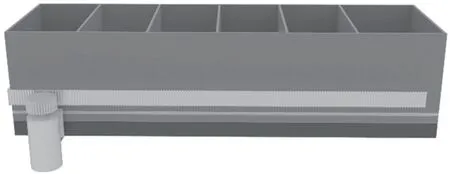
图4 树苗传送机构
1.1.4 覆土机构
该机构由电机、丝杆、覆土卡爪、连杆和导轨组成,如图5所示。连杆连接在丝杆螺母上,电机旋转带动丝杆螺母后移,连杆带动覆土卡爪合拢,从而完成覆土压实。

图5 覆土机构
1.1.5 浇水储水装置
该装置由水箱、水泵和喷头组成。在完成种植任务后,水泵开始运行,喷头开始浇水。
1.2 作业方式
整体安装及功能区分布,如图6所示。种植机按照指定路线前进,约30 s到达起始种植位置,随后1号电动推杆开始运作,驱动种植机构下降插入沙土。在种植机构下降7 s后,2号电动推杆开始运作收回,4 s后带动挡板撑开沙土,随后树苗传送机构运行。每个单元格运动3.5 s后对齐套筒上端,树苗在重力的作用下1 s内会掉落到撑开的沙坑,随后1号电动推杆回收,种植机构5 s内复位、挡板合拢,覆土机构运作5 s后合拢,将沙土压实并复位,同时水泵开始运行喷头浇水,完成整个植树动作。
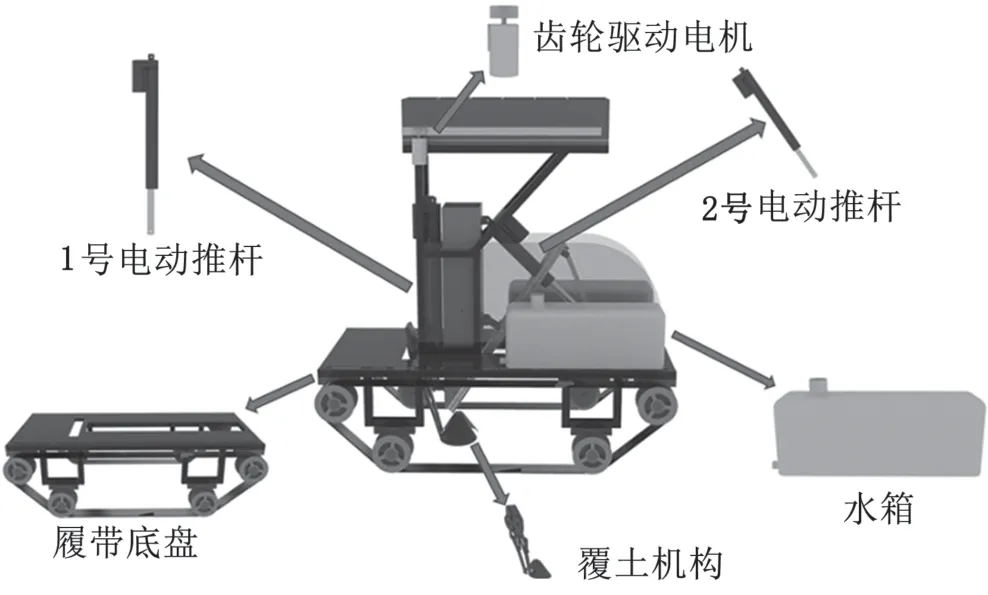
图6 整体安装及功能区分布
2 电子控制
系统拟采用stm32f103c8t6作为主控,用大功率直流电机驱动控制小车的移动,机构正常运行。采用一路超声波用于检测前方是否有障碍物,当有障碍物时,避开障碍。采用UM220-Ⅳ作为全球定位系统(Global Positioning System,GPS)模块,并通过esp8266内网穿透将GPS采集的数据上传到云端,远程定位和控制小车。小车采用全自动模式,使用时指定工作片区即可。多传感器融合使小车位置、检测障碍以及自动转向集于一体进行全自动作业。手机端App可获取esp8266上传的云端数据,方便检测小车的运行状况和所在位置,如图7所示。
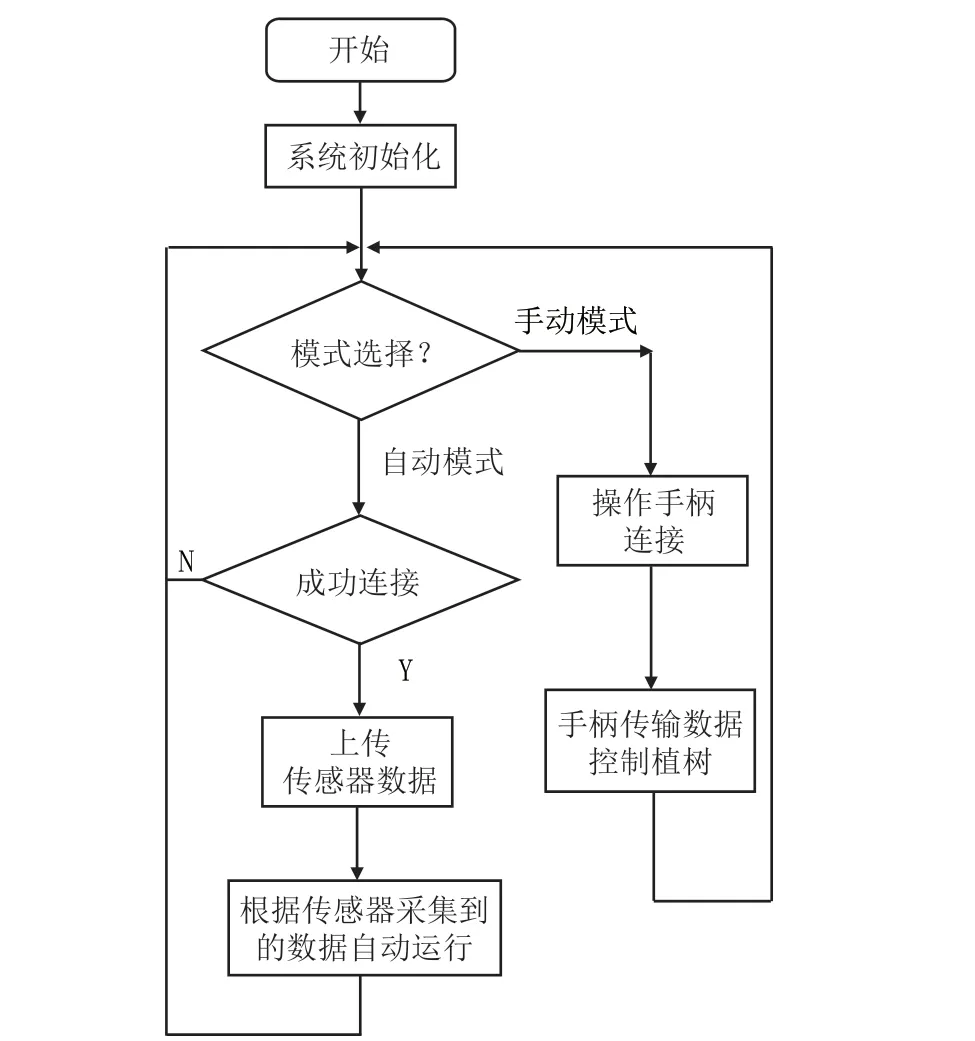
图7 电路控制流程图
3 植树机的有限元分析
3.1 植树机材料定义
根据实际情况,植树机材料选择铝合金,材料参数如表1所示。土壤的材料模型参数,来源为ANSYS材料库。Cam-clay的相关参数,如表2所示。多孔弹性的相关参数,如表3所示。

表1 植树机的材料分析
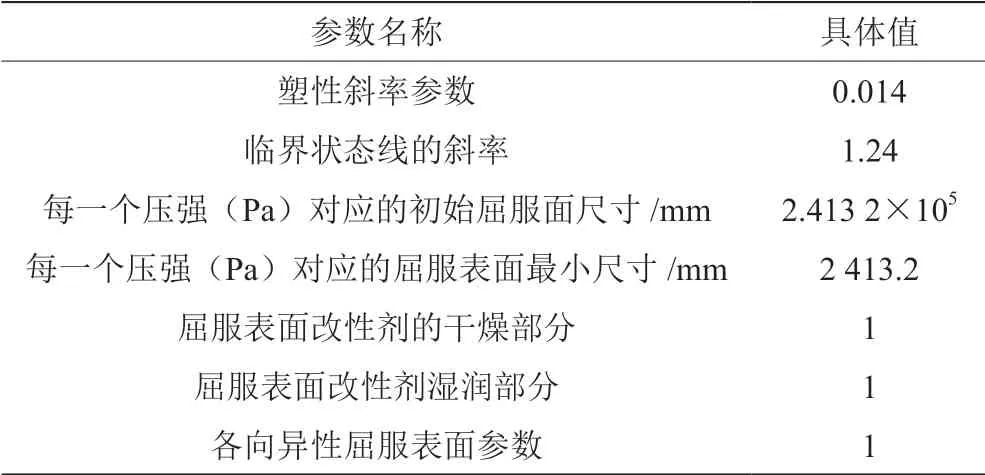
表2 植树机的材料分析

表3 多孔弹性的相关参数
3.2 模型的简化
考虑到计算量较大,把装置简化为一个80 mm×80 mm×100 mm、厚为3 mm的方孔。
3.3 单元的选择
选用ANSYS Workbench默认的实体单元Solid186。Solid186是高阶3维20节点固体结构单元,通过20节点来定义,每个节点有3个沿着xyz方向平移的自由度,具有任意的空间各向异性。单元支持塑性、超弹性、蠕变、应力钢化、大变形和大应变能力,还可采用混合模式几乎不可压缩弹塑性材料和不可完全压缩的超弹性材料。
3.4 显示动力学网格的划分
为了提高计算效率和计算精度,节省计算时间,将网格划分为单元尺寸为25 mm的六面体网格。经过网格划分后的有限元模型,如图8所示,节点数目为39 428,单元数目为49 737。
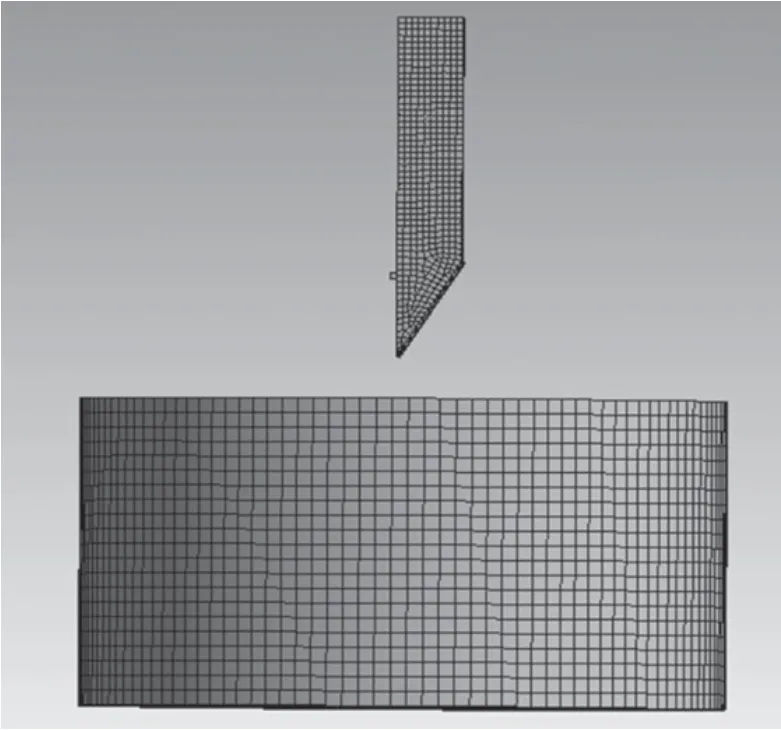
图8 有限元模型
3.5 求解条件的设定
因为计算需要把整体模型简化,电动推杆给种植机的力为100 N,所以在有限元模型中省略了电动推杆部分,直接给种植机垂直于地面向下、大小为100 N的力。为了接近实际工况,给出土壤有限元模型与地面的一个固定副。
3.6 结果
经计算,获得土壤模型的总变形(位移)云图,如图9所示。计算结果表明,种植机落在土壤的位移为236.35 mm,树苗落在土壤里的距离为80~120 mm,可以达到树苗的种植深度约10 cm。
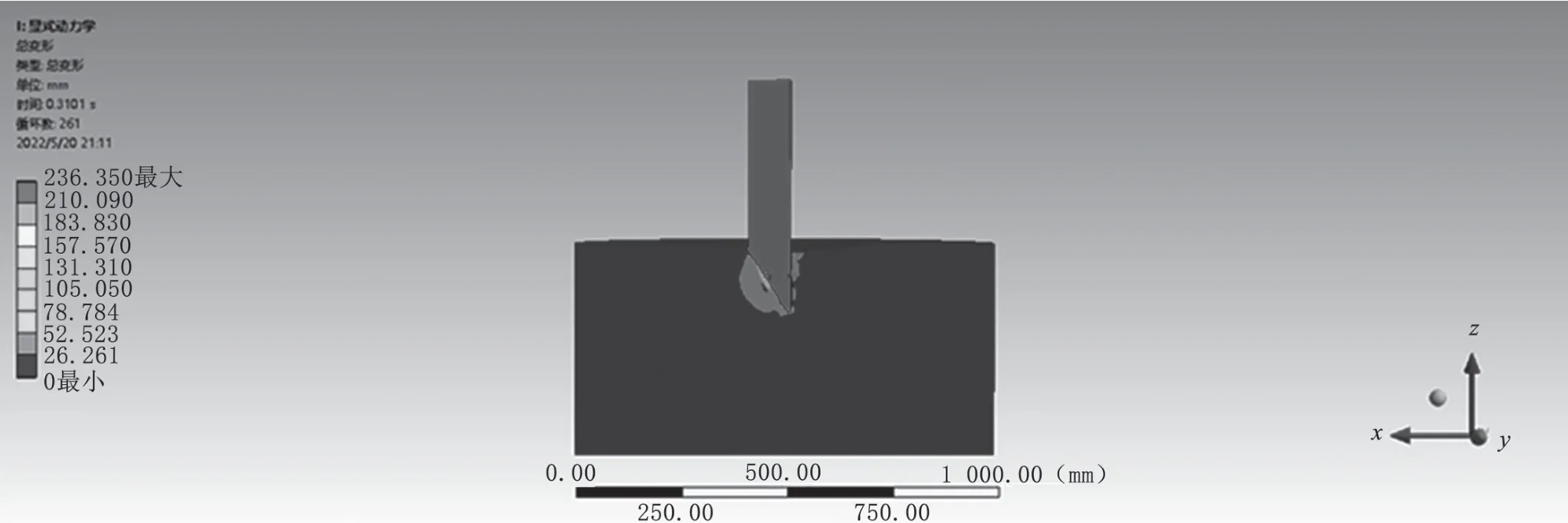
图9 土壤模型总变形云图
4 机械效率
植树效率受1号电动推杆、2号电动推杆、齿轮驱动电机以及履带行进时间影响。1号推杆运作效率为45 mm·s-1,2号推杆运作效率为45 mm·s-1,齿轮驱动电机运作效率为20 r·min-1,履带行进速率为0.18 m·s-1。因为齿轮驱动电机可以与1号电动推杆同时进行,所以忽视齿轮驱动电机运作时间,计算显示植苗效率为每棵55 s。
5 结语
从机械结构看,履带行走能适应不同的沙漠地况,适应性强。一体化多功能种植机能高效种植,装置总质量为50 kg,精巧便捷,方便植树人员携带。从电子控制看,该种植机能够通过手机、平板等电子设备智能控制植树机,自动规划行进方向,实现了全自动化植树。从机械效率结果来看,该种植机平均每分钟种植一株树苗,植树效率高。
