一种新型无碳小车的设计与计算
2022-11-29徐健城李卓恒谢举泽陈博杰李德荣
徐健城,李卓恒,谢举泽,陈博杰,李德荣
一种新型无碳小车的设计与计算
徐健城,李卓恒,谢举泽,陈博杰,李德荣*
(广东海洋大学 机械工程学院,广东 湛江 524088)
鉴于无碳小车轨迹的复杂程度,以往的转向机构广泛应用的曲柄滑块机构和空间连杆机构已不适用于复杂多变的轨迹应用。本文提出一种新型凸轮转向机构的设计方案,对凸轮的参数设计进行了详细计算;给出无碳小车“S”和“8”字轨迹传动系统的计算;为小车的可调性设计了一种简易、实用性强的新型微调转向机构;同时鉴于小车对精度的过度依赖,陈述了无碳小车设计建造及运行时的注意事项及其他细节设计与操作。
无碳小车;凸轮;传动机构;微调转向机构
2021年中国大学生工程实践与创新能力大赛无碳小车赛项要求为:自主设计并制作一台由重力势能转换为动能且具有方向控制功能的自行走势能驱动车,该小车能按题设要求以“S”或“8”字轨迹绕圈循环行驶[1]。现有无碳小车设计制造方法包括基数学计算的直接调试与应用[2]、MATLAB仿真分析[3]、SolidWorks建模仿真[4]、运用解析法对RSSR曲柄摇杆机构进行运动学分析[5]等,以上方法多应用于往届无碳小车的简易轨迹设计中,特别是转向机构广泛应用的曲柄滑块机构和空间连杆机构已不适用于复杂多变的轨迹应用,轨迹的参数和函数需要更新和重设,转向机构也需重新设计。因此,本文提出一种应用于新型“S”型和“8”字轨迹的传动,以及凸轮和微调转向机构的设计和计算方法,总结出无碳小车设计建造及运行时的注意事项及其他细节设计与操作,并且小车在实际应用中证明了其可行性,为无碳小车的设计制造提供了新的数据和设计参考[6]。
1 小车总体设计
由于初赛和决赛的轨迹不同,小车需要根据实际情况更换传动零件。本文设计的小车传动比始终不变,使用一套传动机构,不同轨迹只需更换凸轮和轮子大小即可完成同一辆小车行走两种甚至更多的轨迹,且小车轮子设计较为简单。小车采用三级传动,增大了后轮轴与凸轮轴的距离,使凸轮可以做得相对大一些,同时车把宽不宜过小,可以降低小车凸轮对转向机构的敏感度,增大小车的容错率,降低小车调试难度。无碳小车整体结构如图2所示。

图1 轨迹示意图
2 小车总传动比的设计与计算
小车出发到回到起点时凸轮轴刚好转过一圈,在SolidWorks或CAD等软件中画出所需轨迹并计算出长度,得到轮子直径、轨迹长度、传动比的关系式[7]为:

依据小车实际设计大小可在表1所示范围内选择合适的传动比。
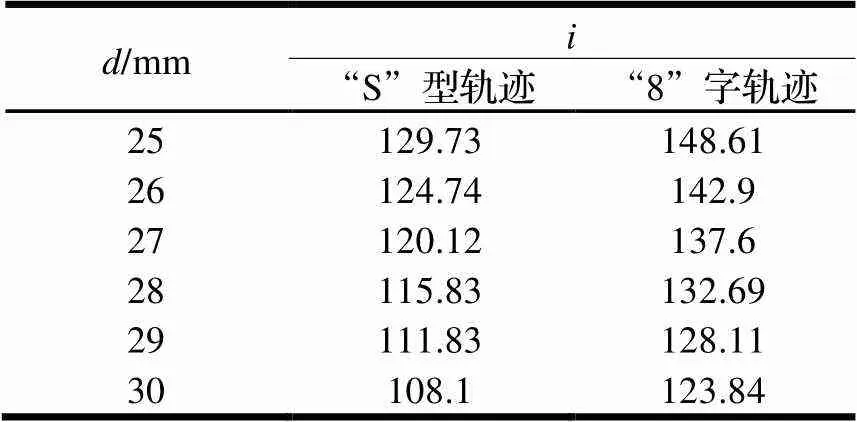
表1 传动比与后轮直径大小计算
在总传动比确定下来后再考虑子传动比的分配,因为齿轮[8]为标准件、且传动比较大,选择0.5模的齿轮最好,其齿隙更小、精密度更高,最后齿数合理安排即可。小车传动机构如图3所示。

1.后轮轴;2.凸轮轴;3绕线轴。
3 凸轮的设计及计算
3.1 凸轮的设计依据
考虑轨迹的复杂程度,设计恰当的凸轮[9]可以使转向机构按预期轨迹左右摆动,从而使小车走出正确的轨迹。凸轮采用激光切割亚克力板成型,结构简单、紧凑,精度高,设计方便,后续可根据小车实际行走轨迹进行凸轮的再设计,使得小车轨迹调整后所进行的凸轮设计效率提高。
在小车设计过程中,凸轮基圆[10]越大,凸轮形状越接近于圆,对轨迹调试中凸轮的设计越容易。本次小车凸轮转向机构属于对心直动滚子推杆盘型凸轮机构[11],参数可根据机械结构适当放大,在小车整体不宜过大和凸轮不宜过小的前提下,选取合适的凸轮基圆半径。由凸轮推杆的位移与凸轮转角的关系,进行凸轮基圆设计,凸轮基圆半径越大则对应的压力角越小。凸轮最小基圆半径为:

式中:为偏距,mm;[]为最大许用压力角,(°)。
最终确定凸轮基圆半径0=60 mm。
利用SolidWorks画出小车行走的轨迹,得出轨迹的点坐标集,运用MATLAB根据凸轮基圆和推杆半径计算出推杆的位移,求出凸轮理论轮廓,最后算出凸轮的实际轮廓。
小车基本参数如表2和图4所示。

表2 小车基本参数

图4 小车基本参数示意图
3.2 凸轮的设计及计算
初步确定凸轮的基圆半径为0=60 mm,推杆滚子半径=3 mm。对小车转向及推杆的基本运动情况进行分析,因其在运动过程中速度变化不大,可视推杆为等速运动,且凸轮工作环境低速轻载,其推程和回程运动规律可选用一次多项式运动规律。
选用“8”字小车出发点前两桩轨迹(如图5中深红线轨迹所示)来举例凸轮设计,其他轨迹以此设计方法类推。
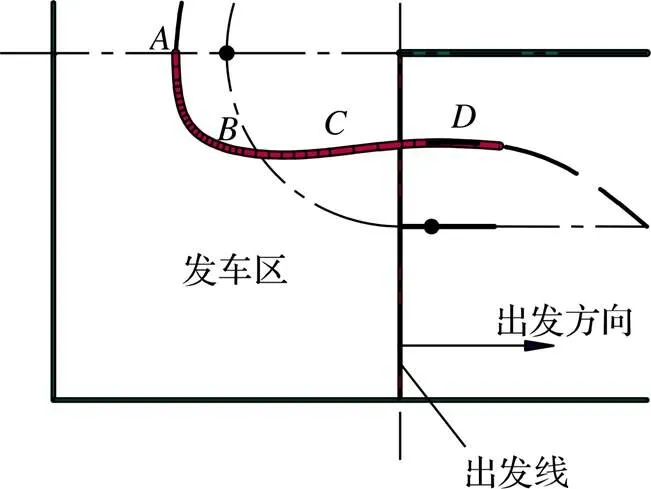
图5 无碳小车出发起始位置图
3.2.1 推杆的位移
推杆的多项式运动规律的一般表达式为:

式中:为推杆的位移;0、1、2、…、C为待定系数,可利用边界条件等来确定;为凸轮转角。
本车凸轮所接触的推杆运动遵循一次多项式规律,凸轮以等角速度转动,在推程时(图5的段),凸轮的运动角为0,推杆完成行程为,得:
取边界条件为:在始点处=0、=0,在终点处=0、=。
则可得0=0、l=/0,故推杆的推程运动方程为:

在回程时,规定推杆的位移总是由其最低位置算起,故是逐渐减小的,其运动方程为:

式中:0为凸轮回程运动角,此时总是从该段运动规律的起始位置计量起的。
代入小车数据得:
推程段:0=12°=1/15π,=9 mm,=0=135π,={0, 1/15π}
回程段:0=12°=1/15π,=9 mm,=(1-0)=9-135π,={0, 1/15π}
近休止段:0=20°=1/9π,=0,=0,={0, 1/9π}
3.2.2 凸轮的理论轮廓(含滚子推杆半径)
凸轮的理论轮廓方程式为:

在对心直动滚子推杆盘型凸轮机构中,凸轮理论轮廓线的坐标有=0、0=0=60 mm,代入即得凸轮3段的理论轮廓。
3.2.3 凸轮的实际轮廓
凸轮实际轮廓(,)对应坐标为:

=9 mm。
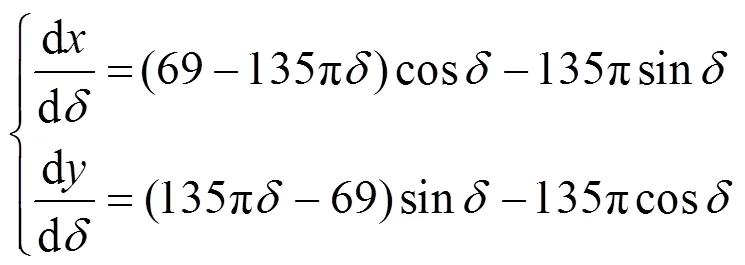
对凸轮的理论轮廓方程式求导得:

代入相关数据得:
推程段:
={0, 1/15π}

回程段:
={0, 1/15π}
近休止段:
={0, 1/9π}

计算可得凸轮实际轮廓线各点的坐标如表3所示。最终由坐标导出CAD得出凸轮轮廓,完成凸轮的设计。
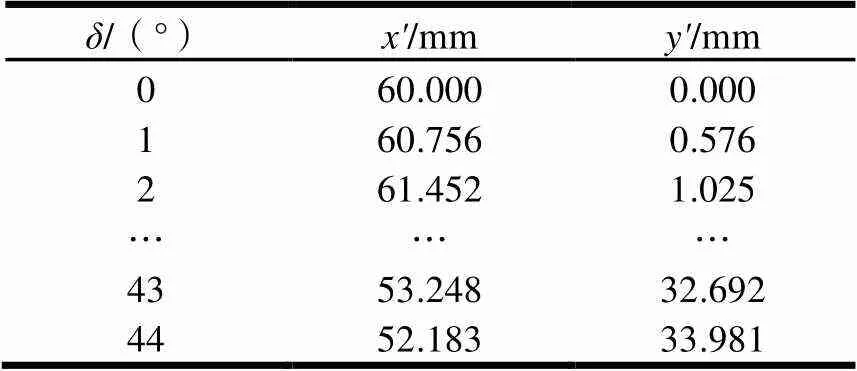
表3 凸轮轮廓坐标点
4 微调转向机构的设计
由于存在加工、装配、场地和不可控的人为误差,小车实际行走轨迹会与理论行走轨迹有较大偏差,小车需增加微调机构修正误差。本文给出一种简单、可靠、拆卸便捷的微调转向机构设计,如图6所示。

1.凸轮推杆;2.滑块;3.导轨固定架;4.微分头。
凸轮推杆由2个微型轴承固定于滑块,凸轮与推杆实际运动为滚动摩擦,相比于固定不变的滑动摩擦凸轮能更加顺利地转动;微调机构可通过千分头微调凸轮与滑块的相对距离,从而微调小车实际行走轨迹;前轮固定轴内嵌旋转弹簧,使推杆与凸轮在回程与去程之间保持密切接触。旋转弹簧安装位置如图7所示。

图7 旋转弹簧安装示意图
5 其他注意事项
(1)无碳小车的比赛场地具有极大的不确定性,其木板材料、干洁度、倾斜度等都会严重影响小车的正常发挥,除材料、倾斜度为不可控因素外,小车与场地的摩擦力是可以人为干预的。需要减少摩擦力时,通过酒精擦拭小车轮子和场地木板,使接触面整洁光滑;需要增加摩擦力时可在轮子上粘电工胶布等方法增加阻滞力。
(2)绕线轴单独设计为可拆卸式阶梯绕线盘,如图8所示,主要作用于小车启动及后续的稳定行走。绕线轴半径过小,则力矩小,启动难;绕线轴半径过大,则力矩过大,小车越走越快;合理运用阶梯绕线盘,在安全启动的同时可保持后续速度的稳定性。

图8 可拆卸式阶梯绕线盘示意图
(3)对凸轮的修正,需要切(更凹)可以用小锉刀或手持式打磨机修正,需要加(更凸)则可以使用电工胶布修正。
(4)小车起始位置固定不变,设计亚克力定位尺。
(5)绕线高度:300 mm绕线高度控制需精准控制,通过砝码内嵌螺纹吊钩,利用螺纹旋入长短调节砝码高度。
(6)凸轮与法兰盘、法兰盘与轴配合间隙要小才能做到零件更换后轨迹保持不变。
6 结语
对新型“S”轨迹和“8”字轨迹的传动系统和凸轮进行设计及计算,为无碳小车的设计制造提供了新的数据和设计参考。提供了一种简易实用、可靠性强的新型微调转向机构,适用于以凸轮实现转向功能的无碳小车或用于其他功能目的的凸轮摇杆机构,可简化机构、提高经济效益。
[1]徐子阳,常小龙,董龙豪. 一种重力势能小车的结构设计[J]. 南方农机,2021,52(20):32-34,41.
[2]施栩,刘伟霖,闵睿,等. 基于余弦机构的S形无碳小车的优化设计[J]. 机械,2019,46(9):70-76.
[3]刘一樊,夏寅力,梁镇海,等. 基于MATLAB的双“8”字无碳小车轨迹仿真分析及其结构设计[J]. 机械设计,2020,37(7):8-13.
[4]倪莉,朱雪明,谢朝慧,等. 基于SolidWorks的无碳小车运动轨迹分析[J]. 机械工程师,2020(10):44-45,50.
[5]庄集超,曾嘉煜,张立群,等. 基于空间RSSR机构的8字无碳小车轨迹计算分析[J]. 机械,2017,44(12):5-8.
[6]马雪亭,周岭,张涵,等. 基于学科竞赛的机械设计课程设计教学改革与实践——以工程训练综合能力竞赛为例[J]. 内燃机与配件,2022(2):241-243.
[7]黄渊,刘少飞,王雪阳. S型变桩距无碳小车设计及优化分析[J]. 机械制造与自动化,2021,50(2):200-204.
[8]孟永红,张利军,李卫军,等. 齿轮模数对传动性能的影响及选择[J]. 四川水泥,2016(6):327.
[9]张楷锜,修峰翼,张予,等. 基于凸轮机构的“双8”字型轨迹无碳小车设计[J]. 机械设计,2020,37(S1):24-28.
[10]孙帮华,张源淳. 直动从动杆盘形凸轮基圆半径的确定[J]. 轻工科技,2017,33(12):50-51,55.
[11]陈华,罗康. 盘形凸轮机构虚拟样机设计与运动仿真[J]. 装备制造技术,2012(7):51-54.
Design and Calculation of a New Carbon-Free Car
XU Jiancheng,LI Zhuoheng,XIE Juze,CHEN Bojie,LI Derong
( College of Mechanical Engineering, Guangdong Ocean University, Zhanjian 524088, China )
Given the complexity of the carbon-free cartrajectory, the crank slider mechanism and spatial linkage mechanism widely used in the previous steering mechanism are no longer suitable for complex and changeable trajectory applications. In this paper, a design scheme of a new cam steering mechanism is proposed and the parameter design of the cam is calculated in detail. The calculation of s-shaped and 8-shaped track transmission system of carbon free trolley is given. A new type of simple and practical fine-tuning steering mechanism is designed for the adjustability of the trolley. In view of the excessive dependence of the car on accuracy, the paper states the precautions and other details of the design and operation of the carbon free car.
carbon-free car;cam;transmission mechanism;fine-tuning steering mechanism
TH11
A
10.3969/j.issn.1006-0316.2022.10.005
1006-0316 (2022) 10-0029-06
2022-01-25
徐健城(2001-),男,广东惠州人,主要研究方向为机械电子工程,E-mail:1912787717@qq.com。
李德荣(1968-),男,湖北松滋人,硕士,高级实验师,主要研究方向为数字化设计与制造技术、机电自动化装备设计与制造,E-mail:lidr2008@163.com。
