S环型无碳小车逆向设计方法研究
2022-11-29马雪亭张涵张宏王旭峰朱哲
马雪亭,张涵,张宏,王旭峰,朱哲
S环型无碳小车逆向设计方法研究
马雪亭1,2,张涵1,张宏1,王旭峰1,朱哲1
(1.塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300;2.中国农业大学 工学院,北京 100000)
以凸轮机构作为传动,设计了一款针对S环型赛道的无碳小车结构,基于逆向设计思维并结合比赛路线要求设计出合理的凸轮轮廓的设计方法。基于控制变量法,在确定无碳小车基本结构的情况下,获取摆角随步数变化规律,继而获取推杆运动规律,同时参照给定赛道在MATLAB平台不断调整,直至获取最佳参数与对应的最优推杆运动规律,最终推导出凸轮轮廓。实验表明,该方法操作难度适中,可行性强,可推广到其它较为复杂的赛道中去,为后续无碳小车的设计工作提供了一定的理论与技术支持。
S环型;无碳小车;凸轮机构;逆向设计
全国大学生工程训练综合能力竞赛主要分为无碳小车类和智能装备类[1-2],其中无碳小车赛项是根据赛道要求,小车从初始点出发避障行驶。第七届(2021年)无碳小车赛道与前六届有明显不同,设定了一种全新的复杂赛道即S环型,利用曲柄摇杆机构也难以胜任。根据以往经验与相关文献,传动机构与转向机构的设计良好与否是无碳小车能否取胜的关键[3-6]。对于复杂赛道,凸轮机构作为转向机构相对合适[7-8]。团队以凸轮机构作为小车主要转向机构,基于“控制变量法”,将小车整体结构固化,只保留凸轮机构设计空间,通过逆向设计思维,根据赛道要求,反向推导出凸轮轮廓线,设计出符合要求的无碳小车。
1 无碳小车的整体结构设计
1.1 整体设计方案
无碳小车多由底板、立柱、原动机构、传动机构、转向机构、行走机构、微调机构等部分组成[9-13]。转向机构多使用曲柄连杆机构和凸轮机构,在赛道轨迹简单(如S型赛道)的情况下可以使用曲柄连杆机构,而赛道复杂(如双8型赛道)时常使用凸轮机构。行走机构可采用单轮驱动或双轮驱动,因单轮驱动方式结构简单、稳定性较好,使用较为广泛[14]。
图1为典型“S型”无碳小车结构。滑轮机构与大赛规定的标准砝码组成原动机构,将砝码的重力势能转化为小车前进机械能[15-16];采用齿轮传动方式,结构紧凑;转向机构采用曲柄连杆机构,连杆长度可调,并通过关节轴承与摇杆相连;车架需力求结构紧凑,多选用亚克力板、铝板、碳钢等材料[17]。
此次设计采用“控制变量法”的设计思路,将无碳小车的基本结构与参数均固定,保留转向机构(主要由凸轮传动机构组成)的设计空间。针对某一复杂赛道所需的无碳小车转向机构,设计方案如图2所示。

1.立柱;2.驱动轮;3.齿轮传动机构;4.绕线轴;5.底板;6.转向轮;7.摇杆;8.连杆;9.曲柄(盘)。

1.细线;2.滑轮机构;3.砝码;4.凸轮;5.摆杆;6.前轮(转向轮);7.齿轮传动机构;8.驱动轮;9.绕线轴;10.底板;11.从动轮。
设定无碳小车的车身长宽高为190 mm×140 mm×475 mm。底板材料采用厚度2 mm的亚克力板,力求结构紧凑,提高无碳小车容错率;选用滑轮悬挂结构作为原动机构,滑轮支撑架选用三根长度约400 mm的铝合金管;选用齿轮机构作为传动机构,传动比稳定,结构紧凑[18];采用凸轮机构作为转向机构,设计灵活,可通过改变凸轮轮廓适应不同复杂赛道[19];行走机构采用单轮驱动[20],选择两个镂空的亚克力板制造的后轮,半径约65 mm,厚度2 mm。另外,为便于小车组装后的调试工作,增设了微调机构,即通过改变转向推杆和转向连杆长度,小幅度调节无碳小车的转向轮摆角,修正实际场地所造成的误差。
整个车体为非对称结构,右侧具有齿轮机构等,导致重心右移。为均衡小车左右重量,避免行驶过程中翻车现象,可采取两种手段解决:一种是尽可能使无碳小车底盘降低;另一种是通过在后轮上根据重心右移情况去除适当材料,通常制成孔板式结构,孔大小可根据重心偏移情况灵活设定,从而达到平衡目的,如图3所示。
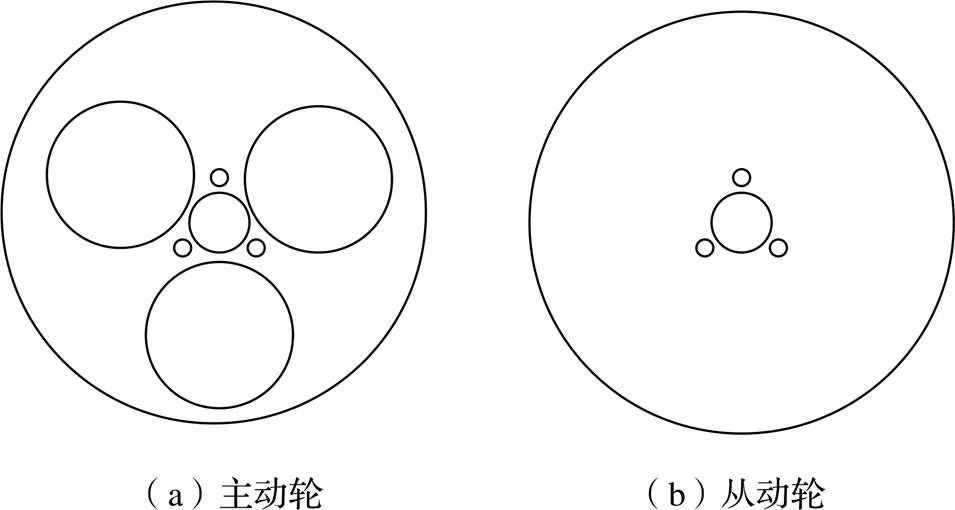
图3 调整重心位置示意图
1.2 受力分析
要求小车在避障过程中运行平稳不打滑,故需对其进行受力分析。为便于探究规律,以小车其中一后轮作为小车整体的等效精简模型(三个车轮的受力均集中到该轮),简化后的力学模型如图4所示。

m为小车质量,kg;g为重力加速度,m/s2;M为小车驱动力矩,N·m;D为简化后模型半径,m;C为简化模型与地面接触点;F0为小车等效驱动力,与F0'组成力偶,N;N0为地面对小车的支反力,其数值大小等于mg,N;Ff为无碳小车与地面间摩擦阻力,与Ff'组成力偶,N。
则小车驱动力为:
无碳小车将重力势能(砝码重量)转换为车轮前行的机械能,忽略传递效率问题,驱动力矩是由无碳小车砝码重力转化过来,如图5所示。
Φ/2为砝码到绕线轴垂直距离,即重力的力臂,m。
图5 重力转化为驱动力矩示意图
则有:

联立式(1)(2),驱动力可表示为:

无碳小车在前行时会受到运行阻力,包括惯性阻力(尤其是小车起动加速阶段)和静阻力,使无碳小车顺利起动需满足的条件为:

式中:为加速度,m/s2;为运行阻力系数,由实验得出经验数据,约为0.01。
无碳小车不打滑的条件为:

式中:为摩擦系数。
设为小车行走距离(m);为小车总效率,则砝码下落时的做功情况为:

则有:

由式(7)可知,为增大无碳小车行走距离,且避免小车打滑现象,在满足起动要求基础上,应尽量使驱动力小一些。驱动力的调整可通过绕线轮几何形状、齿轮传动比的设定等完成。
2 无碳小车凸轮轮廓设计
在凸轮设计方面,提出了根据前轮摆角的运动规律推导出凸轮推程运动规律的设计思路。基于前文固化好的无碳小车结构手动绕轨迹运行获取前轮摆角大致运行规律,推导出推杆运行规律,继而推导出凸轮轮廓曲线,期间需结合仿真获取的轨迹与实际所需轨迹不断调整与验证,直至与所需轨迹吻合。
大赛规定的S环型赛道如图6所示,赛道全长22.5 m,左右对称,由四块隔板和六个障碍桩组成。

图6 S环型赛道
S环型赛道轨迹为中心对称封闭图形,为降低凸轮轮廓复杂程度,设定凸轮每旋转一圈(一个周期)小车行进的距离为半个轨迹,即将半个S环型的轨迹设定成一个周期。将凸轮一周角度均分为等份,假设每次凸轮转动(360°/)时驱动轮行进的距离(即节点之间距离)为L。设定小车发车点的起始坐标为(-1.8, 0),驱动轮平行于各桩的连接线。采用迭代法推算小车行走轨迹,利用MATLAB不断迭代,从而推算得出点的行走运动轨迹。
采用MATLAB参数化设计方法仿真以得到凸轮形状。基于MATLAB的逆向设计需要,事先确定无碳小车参数有前后轴距离、主动轮偏距e、从动轮偏距e',参考历年小车结构取=112.5 mm、e=70 mm、e'=60 mm,如图7所示。图8为前轮摆角示意图,从右往左的圆弧依次表示为主动轮瞬时轨迹、点瞬时轨迹、从动轮瞬时轨迹。每一步迭代主动轮前进的距离为L=(设定为0.00006 m)。
后轴上点的曲率为:

每一步迭代点前进的距离为:
每一步迭代从动轮前进的距离为:
每一步迭代前轮前进的距离为:


图7 车体关键参数

θ为前轮摆角,°;W为过前轮中心的前轮法线与两后轮中心所在直线的相交点;ρ为以W为圆心Q处的曲率,m-1。
为增强可操作性,此次逆向设计在初始发车位置时使小车车身与障碍桩所在直线平行,开始发车时的角度为0°。设行走过程中,车身车身摆角(即主动轮与障碍桩所在直线夹角)为,如图9所示。
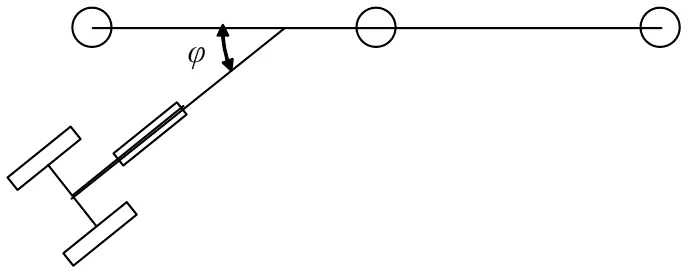
图9 车身摆角示意图
设第一个障碍桩所在位置为坐标原点(点),小车在初始位置时各点坐标分别为:(0, 0.175),主动轮(即驱动轮,此次设计均将右后轮设为主动轮)与地面接触点Q(0, 0.175-e),从动轮与地面接触点Q(0, 0.175+e'),前轮与地面接触点Q(, 0.175)。通过不断迭代可求得小车行走轨迹。

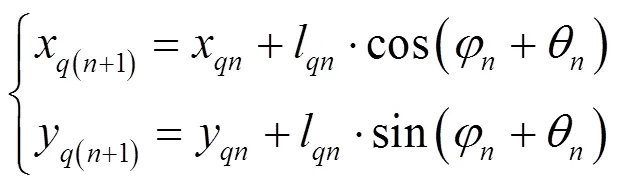
基于迭代方式,求出无碳小车每前进一个步距时车身摆角所对应的点坐标、从动轮坐标、主动轮坐标、前轮坐标分别为:



设置起点坐标为(-1.8 m, 0 m),调试出如上轨迹,从而顺利避开障碍。
为获得上述要求曲线,需对前轮转角曲线的几个参数进行不断调试,最终获取较为理想轨迹时对应的参数为:①每个正弦曲线幅值即前轮转角各段曲线幅值,=0.165,=-0.275,=0.24,=-0.190495815,=0.278299408,决定小车的转向幅度大小;②各段曲线节点数,总=187206、1=15000、2=3000、3=16500、4=3000、5=16500、6=0、7=18000、8=3000、9=17000、10=(-2(1+2+3+4+5+6++7+8+9))/2,决定小车行驶距离,凸轮旋转一圈总步数×L即为一个周期(L)的行驶距离。此时无碳小车前轮摆角曲线如图10所示,且由MATLAB求得最大摆角(弧度制)为0.4356。
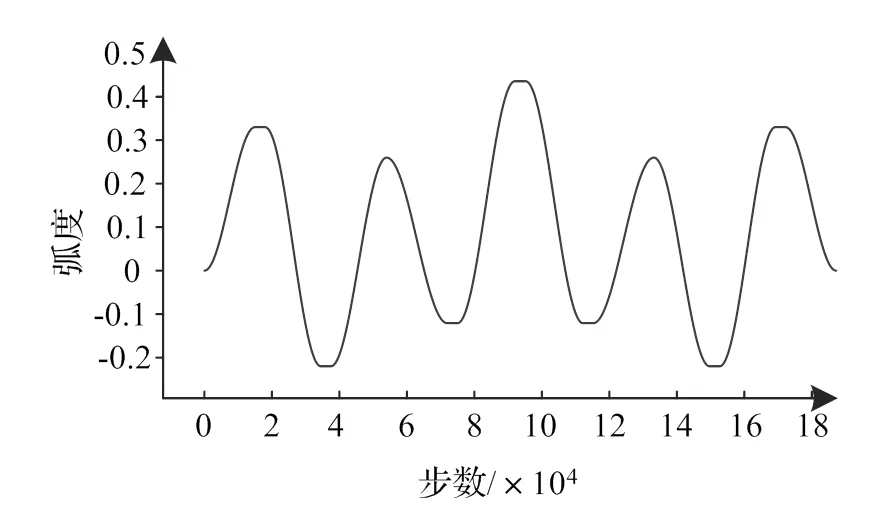
图10 前轮摆角示意图
前轮摆角随步数的运动规律确定后,由图11可知,推杆位移与前轮摆角的关系为:

因前轮最大摆角为0.4356<π/2,故推杆位移与前轮摆角变化成正相关,二者变化规律相同。参照大赛给出的赛道,在MATLAB软件平台不断调试参数,最终得到较为理想的小车轨迹,如图12所示。
前轮摆角与推杆位移规律确定后,通过设置凸轮左边缘到前轮的距离1、凸轮厚度、基圆半径0及与凸轮接触的轴的直径d,即可推算出凸轮的推程,进而得到理论凸轮的形状,如图13所示。
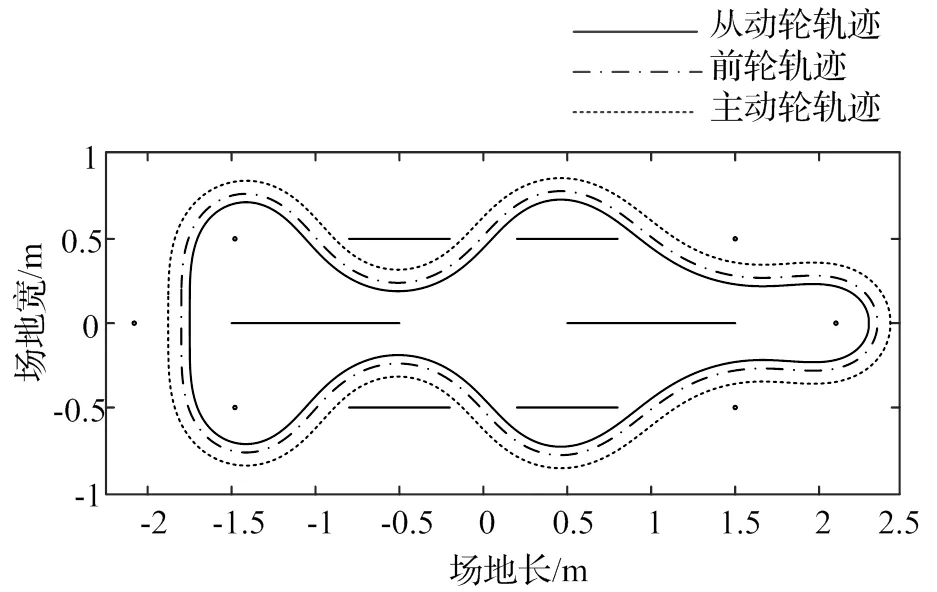
图12 轨迹仿真图

图13 凸轮轮廓图
由于该届赛道较为复杂,路径较长,所需传动比较大,故选择二级齿轮传动机构。根据实际需要,设定=1×2=5×5.5=27.5,后轮直径为130.00 mm,齿轮模数为=1,齿数取1=2=20、3=100、4=110。
3 结论
借助MATLAB软件平台,基于逆向设计思维,将无碳小车整体结构除凸轮机构外基本固化,根据大赛赛道要求对无碳小车凸轮轮廓展开设计。先获取摆角随步数大致规律,继而推出推杆的运行规律,同时基于MATLAB平台结合大赛要求的赛道不断调试,获取最佳参数,最终推导出理想的凸轮轮廓。该设计思路为后续比赛中可能遇到的各种复杂赛道提供了一定技术与理论支持。
[1]张钰,杨灿宇,田绍兵,等. 一种工程训练大赛势能驱动车的设计方法[J]. 科学技术创新,2021(28):179-181.
[2]陆兴发. 大学生工程训练综合创新能力提升策略探索[J]. 内蒙古民族大学学报(自然科学版),2018,33(1):73-78.
[3]朱志康,王慧攀,黄振振,等. 无碳小车的设计与制作[J]. 科学技术创新,2021(20):175-176.
[4]黄渊,刘少飞,王雪阳. S型变桩距无碳小车设计及优化分析[J]. 机械制造与自动化,2021,50(2):200-204.
[5]崔尧勒,李豪,陆智超,等. 无碳小车机械结构的设计与仿真[J]. 科学技术创新,2021(10):170-171.
[6]张北平. 变距行走小车转向机构的参数优化与仿真[J]. 湖北理工学院学报,2020,36(6):1-4,9.
[7]高立婷,杨文敏,杨涛,等. 基于圆柱凸轮机构“8字”无碳小车设计[J]. 机械研究与应用,2017,30(3):200-203.
[8]赵志云,白浩. 凸轮机构在“S”型无碳小车中应用的可行性[J]. 山西大同大学学报(自然科学版),2016,32(2):69-71,77.
[9]徐东镇,陈伟安,李明贤,等. 走出多个“8”字形轨迹的无碳小车机构设计[J]. 机械设计,2020,37(2):39-46.
[10]佘亮,项健,殷建. “S环形”无碳小车的结构设计研究[J]. 工业设计,2019(9):158-160.
[11]杨飞燕,曹璐,徐稳,等. 基于凸轮结构的S环无碳小车结构设计[J]. 中国设备工程,2019(17):148-149.
[12]李元良,张洪双,曹钊源,等. 无碳小车轨迹的逆向分析方法[J]. 机械设计,2017,34(8):76-79.
[13]贾先,王晗,王笃,等. 基于不完全齿轮与曲柄摇杆机构进行转向控制的无碳小车[J]. 机械制造,2017,55(12):36-38.
[14]曾东湖,张丹. 基于凸轮控制的双8字无碳小车[J]. 机械制造,2020,58(2):58-62.
[15]刘一樊,夏寅力,梁镇海,等. 基于MATLAB的双“8”字无碳小车轨迹仿真分析及其结构设计[J]. 机械设计,2020,37(7):8-13.
[16]邬海龙,崔壮,王晶东. 基于椭圆齿轮的实现变间距绕桩的无碳小车设计[J]. 长春理工大学学报(自然科学版),2017,40(5):77-81.
[17]张楷锜,修峰翼,张予,等. 基于凸轮机构的“双8”字型轨迹无碳小车设计[J]. 机械设计,2020,37(S1):24-28.
[18]潘银松. 机械设计制造及其自动化专业应用型本科系列教材,机械原理[M]. 重庆:重庆大学出版社,2016:241.
[19]陈晓南,杨培林. 高等院校“十三五”规划教材:机械设计基础[M]. 3版. 北京:科学出版社:,2021.
[20]刘洋,姜吉光,谢醇. 基于“轨迹分析法”的无碳小车微调机构的创新设计[J]. 机械传动,2015,39(12):83-87.
Research on Reverse Design Method of S-ring Carbon-Free Car
MA Xueting1,2,ZHANG Han1,ZHANG Hong1,WANG Xufeng1,ZHU Zhe1
(1.School of Mechanical and Electrical Engineering, Tarim University, Alar 843300, China; 2.School of Engineering, China Agricultural University, Beijing 100000, China)
The National College Students' engineering training comprehensive ability competition is held every two years to improve college students' engineering innovation consciousness, practical ability and teamwork spirit, and promote the cultivation of innovative talents. The carbon-free car competition is a standing event in the competition. For the more complex track, it is more appropriate to use the cam mechanism as the trolley transmission mechanism. Designing a reasonable cam profile according to the requirements of each competition is the key to the accurate walking of the trolley. Based on reverse design thinking, a carbon-free car structure for the S-ring track is designed in this paper. The design steps have clear objectives and strong operability: base on the control variable method, after determining the basic structure of the carbon-free car, obtain the variation law of the swing angle with the number of steps, and then obtain the push rod motion law; at the same time, concerning the given track of the competition, continuously adjust it on the MATLAB platform until the optimal parameters and the corresponding optimal push rod motion law are obtained, and finally deduce the cam contour. The experiment shows that this method has moderate operation difficulty and strong feasibility, and can be extended to other complex tracks, which provides a certain theoretical and technical support for the subsequent design of carbon-free cars.
S-ring;carbon-free car;cam mechanism;reverse design
TH11
A
10.3969/j.issn.1006-0316.2022.10.004
1006-0316 (2022) 10-0023-06
2021-12-02
塔里木大学一流本科专业建设项目——机械设计制造及自动化(YLZYXJ202102);塔里木大学高教项目(TDGJYB2019)
马雪亭(1990-),男,山东博兴人,博士研究生,主要研究方向为智能农业装备设计,E-mail:xtjxgc@163.com。
