航空发动机地面试车台加温加压进气控制系统设计
2022-11-28陶国云罗振伟王晓宇
周 易,黄 猛,陶国云,罗振伟,王晓宇
(1.中国航发沈阳发动机研究所,沈阳 110015;2.空军装备部驻沈阳地区第二军事代表室,沈阳 110015)
0 引言
航空发动机地面试车台能够通过管道供气的方式为航空发动机提供一定温度、压力的气体,模拟在不同飞行状态下发动机的工作环境。加温加压进气系统是试车台的重要组成部分,直接影响发动机试验环境的模拟情况。为保证发动机的试验环境,对进气系统的供气温度、压力、流量范围和随动能力等提出了非常高的要求。
目前中国已有用于航空发动机整机的地面试车台,能够为航空发动机整机提供高空模拟状态下的进排气环境,但是其进气温度、压力的调节精度不高;国外同样有类似的航空发动机地面试车台,但是其具体设计参数无法知悉。
但志宏等[1]介绍了模糊比例-积分-微分(Proportional Integral Derivative,PID)控制器的技术原理和基于可编程控制器(Programmable Logic Controller,PLC)的控制器解决方案及设计方法;张松等[2]将常规PID控制和模糊控制结合起来,构成兼有二者优点的排气环境压力控制系统的具体实施方案;廖邦兴等[3]提出了核心机燃油与控制系统的选用原则和核心机控制计划制订的基本方法;彭勇刚[4]针对模糊控制技术应用的几个关键问题及其解决方法进行了研究,扩大了模糊控制的应用范围;熊荆江[5]结合某高空模拟试车台建设的工程实践,对该高空台供气调节系统的设计进行了深入研究;钱伟[6]从控制理论的基本概念与方法出发,在构造合适的Lyapunov-Krasovskii泛函的基础上,采用不同的分析方法探讨了时滞系统的若干问题;乔彦平等[7]将遗传算法应用到进排气系统进气压力自动控制系统中,对自动控制系统的PID控制参数进行优化,获得良好的控制效果;张松等[8]结合高空台调压系统的特点,提出了上位机、下位机+实物部件的形式组成半物理仿真系统,实现了模型计算、数据采集、上下位机数据通讯及系统参数控制等功能;赵涌等[9]提出在进气压力常规PID反馈控制的基础上增加按空气流量补偿的前馈控制,构成压力复合控制系统;王述彦等[10]设计了模糊PID控制器并进行了仿真和试验验证,改善了控制效果;王季方等[11]、刘向杰等[12]、蔚东晓等[13]结合近年来模糊控制的最新研究成果,简要介绍了模糊控制的概念和特点,并对模糊控制的原理作了说明,较详细的介绍了模糊控制的现状;冯晓露等[14]提出了一种新的基于遗传算法的动态模糊控制器优化方法,对模糊控制器控制规则表中的数据进行实时在线的动态优化;傅强等[15]对航空发动机的双变量解耦控制方法进行了研究,提出了一种基于遗传算法的PID神经网络解耦控制算法,克服了BP算法易陷入局部权值的缺点;刘福才等[16]对模糊系统的通用逼近性、模糊系统作为通用逼近器的充分条件和必要条件以及模糊系统的逼近精度等方面的研究进行了较为详尽的综述;刘凯[17]介绍了某间冷燃气轮机台架试验控制系统总体设计方案,对燃气轮机控制系统的组成、功能实现方案、控制逻辑以及燃气轮机的安全保护、数据监控等方面进行了较为详细的阐述。
本文针对该试车台的加温加压进气系统,设计了基于西门子PLC平台的控制系统。
1 加温加压进气系统结构与原理
加温加压进气系统的设计指标:进口压力范围为100~1000 kPa;进口流量≤200 kg/s;最大温升≤350℃(流量≤100 kg/s)。该系统的基本结构如图1所示。

图1 加温加压进气系统的基本结构
在气源进气后,通过第1级调压系统粗调进气压力,并通过调节电加热器的功率得到特定温度、压力和流量的压缩空气。与电加热器流路并联的管路平时关闭,当需要对压缩空气进行快速降温时打开,利用掺混器将冷却气与热气混合。
随后通过第2级调压系统进一步粗调进气压力,为第3级调压系统中的阀门提供适当的备压。最后通过第3级调压系统快速精确地调节供气压力,经过稳压箱过滤压缩空气压力和温度的波动与畸变,最终保证发动机进口(即稳压箱出口)气体的温度、压力、流量满足需求。
在加温加压进气系统中,设计指标的流量需求较大,因此管道通径都很大。第1、2级调压系统对压力控制的精度要求不高,综合考虑实际需求及设备成本,一般选用电动的套筒式调节阀和电动调节蝶阀。而第3级调压系统是发动机进口前的最后1级压力调节,需要快速准确地响应发动机的压力需求,因此选用响应速度快、调节精度高、出口流场好的液压轴流阀。
为了迅速发现各部件故障或故障征候,需要对进气系统中可能发生故障的设备(电加热器、掺混器、阀门和进气管道、稳压箱)进行监控,故在每个部件的进、出口都设有温度、压力变送器,以监视每个部件的工作状态,并根据不同的故障综合进行传感器的放置和排布。
温度变送器选择的类型是绝缘式K型铠装热电偶。压力变送器则选用常见的扩散硅式绝压变送器,变送器的引压管足够长,便于将高温压缩空气的温度降低到变送器能允许的温度;引压管具有避免堆积在管内的冷凝水结冰的功能。
2 控制系统设计
2.1 控制系统总体设计
控制系统采用基于西门子WinCC平台的上位机监控系统进行人机交互操作,通过西门子PLC实现对进排气系统各设备的控制,包括系统压力、温度、流量等参数的调节与控制;当发生超温、超压等异常情况时报警,具有自保护功能。控制系统的结构如图2所示。

图2 控制系统结构
加温加压进气系统的温度调节利用电加热器实现,电加热器为成套设备,控制系统由设备供应商进行集成,能够实现本地和远程的温度给定闭环控制、功率给定开环控制等功能。
对加温加压进气系统结构与原理进行分析可知,第1级调压系统由于管径较大,阀门动作较慢,且不需要进行压力精确调节,因此在控制系统中不需要进行闭环控制。
第2级调压系统主要负责为第3级调压系统提供适当的备压。为了保持第3级调压系统中的液压轴流阀上游压力稳定,减少前级调压系统的压力波动干扰,提高发动机进气压力的控制精度,同时考虑到电动调节阀动作较慢的特点,本文设计了1个死区控制算法实现第2级调压控制。在死区控制算法中,需要设置的参数为目标压力值、死区压力值范围、阀位动作步进速度。死区控制算法流程如图3所示。图中P为实测压力值,P0为目标压力值,Pd为死区压力值。

图3 死区控制算法流程
第3级调压系统需要快速精确地调节供气压力,且保持与发动机状态随动,采用同时调节轴流阀前压力和稳压箱出口压力的调节方案,即采取主路截流、旁路放气的方法,对轴流阀进行压力闭环控制,第2级调压系统随动调节。
在保持旁路前的主气路上已调好温度的空气总质量不变的情况下,使总供气量不受发动机状态改变的影响,保持发动机进口压力稳定,确保发动机在不同工作状态下所需要的空气流量。
整套加温加压进气系统由许多具有非线性、大滞后等特性的设备组成,在温度、压力的调节与控制中相互干扰的影响因素很多,因此在第3级调压系统中,使用传统的PID控制器效果一般。现有的控制系统采用的PID控制方式,是根据调试经验摸索出若干套PID参数,针对发动机的不同状态进行切换。这种方式有较大缺陷:一方面需要提前调试若干套PID控制参数,造成前期工作量过大以及能源的浪费;另一方面,调试得到的控制参数无法保证最优。
另外,由于系统结构复杂,参数具有时变性,且各设备状态之间耦合度较高,因此搭建系统仿真模型的难度很大,模型的精确度不高,这也造成了控制器设计与仿真验证的难度加大。
针对系统的上述特点,本文为第3级调压系统设计了一种模糊PID控制器,其优点为:根据工程人员的经验设计控制器参数,不需要搭建系统的精确数学模型;控制器的参数能够根据系统响应曲线的不同阶段实时在线整定,能够适应发动机试车过程中的不同状态点;控制器参数可调且易调,经过优化可以适应后续其他型号发动机的不同试验要求。
2.2 压力模糊PID控制器设计与仿真
模糊PID控制器不需要借助精确的数学模型,而是利用模糊数学的基本理论和方法,把工程人员PID控制器参数设计的经验转化为模糊推理的模糊集合和模糊规则,利用代码予以实现后,在控制过程中实时运行算法,在线整定PID控制器参数。模糊算法将系统的误差e以及误差变化率ec作为输入,利用e和ec描述系统当前状态,并实时计算出合适的控制参数Kp、Ki和Kd,输出到PID控制器,从而实现参数在线整定。模糊PID控制器原理如图4所示。根据以往控制器的设计和调试经验,利用MATLAB平台下的模糊算法工具箱设计了1个模糊PI控制器。模糊PI控制器设计流程如图5所示。

图4 模糊PID控制器原理
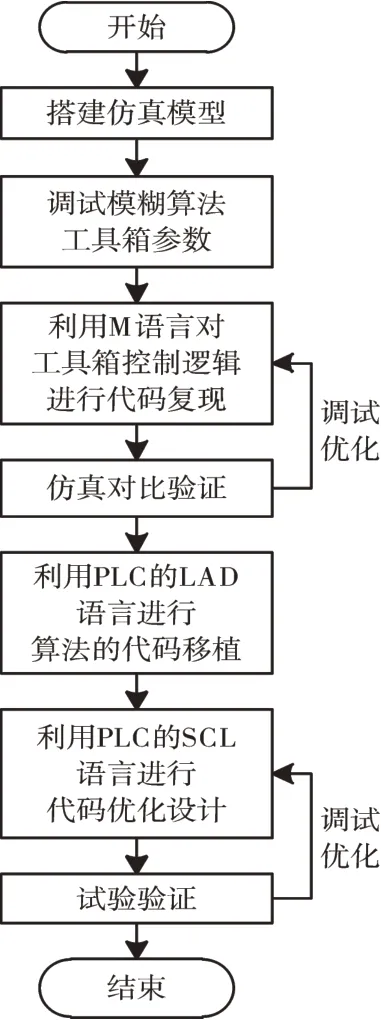
图5 模糊PI控制器设计流程
本文对模糊算法工具箱的算法逻辑进行了分析并调整了模糊算法的参数设置。
为了便于模糊算法的运行,应将加温加压进气控制系统的进气压力误差e以及误差变化率ec线性变换至区间[-1,1]内,其变换式为
e=
■■■■■
-e1/,15e,0e>,
<-550-05<0
e<50(1)
ec=
■■■■■
-e1c,1/e5,c
0
e>,c<-550-05<0
ec<50(2)
定义3个模糊集合N、Z和P,分别表示e和ec的取值趋向于定义域的下限值(Negative)、零(Zero)和上限值(Positive)。
根据e和ec在各模糊集合上的隶属度,利用模糊规则进行模糊推理,将计算得到的模糊参数进行反模糊化处理,得到整定后的Kp和Ki值。模糊推理规则如下:
(1)If(eis N)and(ecis N)then(Kpis Z)(Kiis Z);
(2)If(eis N)and(ecis Z)then(Kpis P)(Kiis Z);
(3)If(eis N)and(ecis P)then(Kpis P)(Kiis Z);
(4)If(eis Z)and(ecis N)then(Kpis Z)(Kiis P);
(5)If(eis Z)and(ecis Z)then(Kpis Z)(Kiis P);
(6)If(eis Z)and(ecis P)then(Kpis Z)(Kiis P);
(7)If(eis P)and(ecis N)then(Kpis P)(Kiis Z);
(8)If(eis P)and(ecis Z)then(Kpis P)(Kiis Z);
(9)If(eis P)and(ecis P)then(Kpis P)(Kiis Z)。
每条模糊规则都使用e和ec在各模糊集合上的隶属度值确定Kp和Ki在各模糊集合的隶属度。
例如第(3)条模糊规则,Kp在模糊集合P和Ki在模糊集合Z的隶属度为

式中:Kp,p3为第(3)条模糊规则下Kp在模糊集合P上的隶属度;Ki,z3为第(3)条模糊规则下Ki在模糊集合Z上的隶属度;eN为e在模糊集合N上的隶属度;ec,p为ec在模糊集合P上的隶属度。
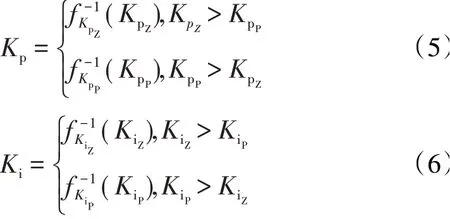
根据上述9条模糊规则,可以求出Kp和Ki在不同模糊集合上的9个隶属度值。取其中的最大值为Kp和Ki在对应模糊集合的最终隶属度值

根据Kp和Ki在各模糊集合的隶属度值,通过反模糊化处理得到最终的Kp和Ki值。基于最终将该控制器工程化的考虑,在PLC编程中,计算函数的积分较为困难,因此在反模糊化过程中,利用Kp和Ki的隶属度值求其实际值时,不使用常用的中位数法,而是用最大隶属度法实现。反模糊化计算为
利用M语言将上述分析结果进行代码复现,并进行仿真验证,得到的结果与模糊算法工具箱的运算结果相同,模糊PID控制器仿真曲线如图6所示。仿真结果表明,模糊PID控制器能够有效减小系统响应的超调,加快系统响应速度,Kp和Ki的优化过程符合模糊规则的逻辑。

图6 模糊PID控制器仿真曲线
2.3 压力模糊PID控制器移植与优化
西门子PLC平台有顺序功能流程图(Sequential Function Chart,SFC)、梯形图语言(Ladder Logic Programming Language,下文简称LAD)、功能块图(Function Block Diagram,FBD)、结构化控制语言(Structured Control Language,SCL)等多种编程语言。其中LAD语言直观易懂,适用于数字量逻辑控制,在工程实际中应用广泛;SCL语言是一种类似于计算机高级语言的编程方式,适用于复杂运算功能、复杂数学函数、数据管理、过程优化等应用领域。
基于LAD语言进行模糊PID控制器的代码移植,控制程序包含的程序块及用途如下:
(1)“FC1000_模糊PID控制器”(功能块)为控制器主程序,包含与PLC主程序的数据IO接口,能够实现模糊PID控制器的主要功能;
(2)“FC1001_TRIMF函数”(功能块)为一种分段线性函数,用于计算变量在模糊集合上的隶属度;
(3)“FC1002_TRIMF逆函数”(功能块)为FC1001中TRIMF函数的逆函数,用于根据变量的隶属度反模糊化求变量值;
(4)“FC1003_取平均数”(功能块)能够计算2个浮点数的平均值;
(5)“DB1000_模糊PID控制器参数”(数据块)用于存储模糊PID控制器的参数。
LAD语言是一种图形化的编程语言,其优点是直观易懂,缺点是基本指令类型较少,实现复杂功能时程序结构较为繁琐;而SCL语言是一类高级编程语言,在实现算法方面较LAD语言有明显优势。
利用SCL语言将模糊PID控制器进行代码优化,实现与LAD程序相同的功能,2种语言程序块代码量对比见表1。
从表中可见,SCL语言实现复杂算法具有编程简单、代码量较少、能够减小CPU运算负荷等优点。
2.4 小结
设计后的压力控制系统、温度控制系统的控制回路分别如图7、8所示。

图7 压力控制系统的控制回路
压力控制系统充分考虑了硬件条件限制,通过手动控制、死区控制、模糊PID控制等多种方式实现了发动机进口压力控制。温度控制系统为厂家集成设备,主要的设计工作在于上位机人机交互系统的数据通讯接口、控制界面设计、多系统联动的协调机制等方面。

图8 温度控制系统的控制回路
3 发动机试车验证
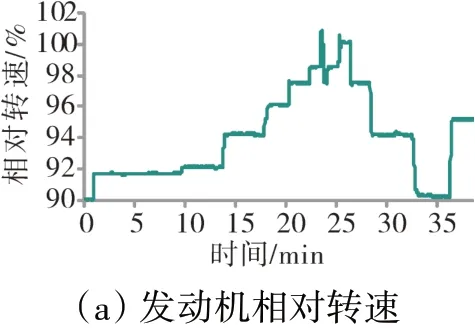
本文所设计的加温加压进气控制系统已经在实际试车工作中得到应用。在某次加温加压试车中,发动机相对转速以及压力、温度控制曲线如图9所示,图中黑色虚线为控制目标。

图9 发动机相对转速以及压力、温度控制曲线
气源来气温度约为70℃,流量约为60 kg/s。试车流程的20~30 min为数据采集阶段,发动机对进气系统的要求为:进气压力为245~255 kPa;进气温度为140~150℃;进气流量约为50~55 kg/s。
发动机的其他状态为过渡阶段,用于发动机和设备的状态调整与协调匹配。
在此期间,发动机转速一直在变化,加温加压进气控制系统根据发动机的要求进行实时闭环控制。试车数据分析结果为:
进气压力目标为135~140 kPa时,将控制目标设定为137 kPa,过渡态由100 kPa调整至137 kPa共用时约100 s,无超调,稳态控制精度为0.04~0.81 kPa;进气压力目标为245~255 kPa时,将控制目标设定为250 kPa,过渡态由137 kPa调整至250 kPa共用时约200 s,无超调,稳态控制精度为-3.09~3.07 kPa。
进气温度目标为140~150℃,开始加温时,发动机处于状态调整阶段,温升率不能过快,因此分阶段进行温度调节。最终将控制目标设定为145℃,过渡态由100℃(气源站来气温度)调整至145℃共用时约10 min,超调2.15℃,稳态控制精度为-2.53~1.10℃。
在试车结束后的发动机状态下降阶段,需要先降低发动机的进气温度,后降低进气压力。在实际操作中,直接将目标温度设为0℃,进气压力随进气温度的降低分阶段调整。
由试车数据可知,加温加压进气控制系统能够实时跟随发动机的状态变化,维持进气压力和温度的稳定。
4 结束语
本文所述的航空发动机地面试车台加温加压进气控制系统能够完全满足发动机地面试车对进气压力、温度、流量的要求。
针对多级调压系统设计了1个模糊PID控制器,分别利用MATLAB仿真平台和实际试验试车对其控制效果进行了验证。仿真结果和试验试车数据都表明,模糊PID控制器的控制效果更优。
模糊PID控制器在设计过程中不依赖于系统的精确模型。而在航空发动机设备设计领域中,整个系统的结构往往比较复杂,参数具有时变性和不确定性,系统建模较为困难。因此,在未来的航空发动机设备设计中,模糊PID控制器应当加以推广和应用。
