9QZ-200 自走履带式青饲料收获机设计与试验*
2022-11-28李正锁李晓康王砚麟张家瑞刘圆园沈小波
李正锁,李晓康,王砚麟,张家瑞,刘圆园,沈小波,谢 艳
(1.甘肃省机械科学研究院有限责任公司,甘肃 兰州 730030; 2.甘肃省草地农业机械重点实验室,甘肃 兰州 730030;3.中牧实业股份有限公司 兰州生物药厂,甘肃 兰州 730046)
0 引 言
随着我国草牧业的快速发展,青饲料收获机械的市场需求呈现出快速增长的趋势。 目前我国丘陵、山地机械化综合作业水平较低,发展较慢,与平原地区差距较大,区域发展不平衡问题日益突出,严重阻碍了我国农业机械化发展的总体进程。 因此,在丘陵山区实施青饲料机械化收获作业已成为草牧业发展的关键环节[1-2]。 国外的机具虽然自动化程度高,但是价格昂贵,维护和运行成本高,难以广泛推广;而国产机型以轮式结构居多,不适合丘陵、山地地区的青饲料收获作业,并且传统青贮饲料收获机料仓通常都采用一次侧翻式结构,因为料仓容积普遍较大,青饲料受休止角、堆积容重及料仓倾角的影响,不能完全倒出,严重影响收获机的收获效率[3]。 针对上述现状,研制了一种自走履带式青饲料收获机,采用的链板式料仓,可将黏性较大的青饲料全部倒入接料车厢,可适用于丘陵、山地和小地块。 通过设计达到作业范围广,适应性强的技术要求。
1 结构设计及主要技术指标
1.1 结构设计
9QZ-200 型自走履带式青贮饲料收获机主要由割台、驾驶室、切碎喂入装置、抛送装置、传动系统、发动机、底盘、料仓及液压控制系统、电控系统等部件组成,如图1 所示。 该机主要适用于玉米、甜高粱等青贮作物的收获,在田间作业时能一次完成对青贮作物的收割、切碎、揉搓、抛送、集料及倒料装车[4]。

图1 4QZ-200 自走履带式青饲料收获机示意图
1.2 传动系统
该机由发动机提供动力,传动系统将动力分为三路,第一路为常闭式行走传动系统,该路动力从发动机传递至HST 后,由HST 控制底盘的行走与转向;第二路为常开式作业传动系统,传递路径为发动机-液压合器-喂入切碎装置-割台,其中喂入切碎装置设置有正反转变速箱,当发生堵塞时,喂入切碎装置及割台可以反转,达到快速清堵的效果;第三路动力从发动机传递至液压泵,通过液压泵驱动割台升降油缸、料仓举升油缸及卸料马达。
1.3 工作原理
整机田间作业时,割台将青饲料秸秆割断并通过喂入装置送入切碎机构,通过切碎刀的高速旋转,将青饲料切碎,经抛料筒抛至料仓中,驾驶员可以通过显示屏观察整机运行状态,待料仓装满后,液压系统控制料仓两侧的油缸升起,当油缸到达最大行程时,料仓完全升起,此时卸料马达带动料仓链板向外运输青饲料,直至料仓内青饲料全部倒入接料车。
1.4 技术参数
9QZ-200 自走履带式青饲料收获机主要技术参数如表1 所列。

表1 4QZ-200 自走履带式青饲料收获机主要技术参数
2 主要工作部件结构计算及分析
2.1 底盘总成
为满足丘陵山地、水田等地区的行走要求,底盘设计为转弯半径小、接地比压小的橡胶履带底盘。 设计的底盘主要由机架、HST、轮系及履带等构成,使用110 kW 柴油机提供动力,集成静液压驱动行走无级变速系统,无需换挡实现前进后退及无级变速,操作简单,方便灵活;采用履带式底盘结构,由于履带式底盘重心低、附着系数大,具有良好的行走稳定性及较强的爬坡能力,并可实现原地转向,能够很好地适应丘陵、山地地区的作业特性,并且履带的接地压力小,对土壤结构有一定的保护作用。 整机的接地比压决定了可通行作业的范围,根据整机的设计布局确定履带接地长度为1.75 m,通过计算履带接地比压计算选型履带宽度为0.45 m,按整机最大爬坡角度为15°计算,取履带滚动阻力系数为0.15,计算整机牵引力,取整机作业行进速度为2 km/h,则可计算出整机驱动所需的功率。
2.1.1 接地压力计算
(1) 总质量计算
根据设计,整机总质量包括机器自身重量(含油、水)、驾驶员重量和满载青饲料质量总和,可以表示为:

式中:m1为机器自身质量(含油、水),4 610 kg;m2为驾驶员质量,60 kg;m3为满载青饲料总质量,kg;ρ为青贮饲料的自然堆积容重,250 kg/m3;V为料仓容积,3.2 m3。
(2) 接地面积计算

式中:A1为履带接地面积,m2;L为履带接地长度,1.75 m;B2为左、右侧履带宽度,0.45 m。
(3) 平均接地比压计算

式中:p1为履带平均接地比压,kPa;M为总质量,kg。
2.1.2 整机驱动功率计算
(1) 牵引力计算
整机最大牵引力由满载时正常行驶的滚动阻力和最大爬坡阻力构成,因此整机最大牵引力可表示为:
F=Ff+Fτ=fMg+sinθMg=22 kN (5)
式中:Ff为滚动阻力,kN;Fτ为坡道阻力,kN;f为滚动阻力系数,0.15;θ为最大爬坡角度,15°。
(2)整机驱动功率计算
整机驱动功率可通过最大行进速度和最大牵引力求得:

式中:vmax为最大行进速度,m/s。
因此驱动整机所需最大功率为44 kW。
2.2 割 台
割台主要由转筒、盘式割刀、分禾器、拨禾齿、扶禾杆等构成,如图2 所示。 本割台采用两个直径为738 mm 的圆盘式割刀,按左右对称布置,割刀上端为带拨禾齿的转筒,割刀转速为1 106 r/min,转筒转速为36.6 r/min。 割台前端为大、小分禾器,对称分布在割台两侧。 割台工作时,两边割刀与转筒以不同的转速相向回转,将青饲料秸秆切断送入喂入装置。 其中,由于圆盘式割刀直径较大,若按一个整体的零件加工,这对割刀的材料及加工工艺都有极高的要求,成本势必会增加。 为了解决该技术问题,将圆盘割刀设计成8 个小的割刀,并将小的割刀分别装配到特制的圆盘上,便于割刀的安装和拆卸。 另外,由于转筒转速较低,割台在工作过程中会有青饲料秸秆缠绕到转筒上,影响割台的正常运行。 为此,在割台支架上设置有清料装置,随着转筒的回转,能够将缠绕的青饲料秸秆及时清理,保证转筒的正常运转[4-5]。
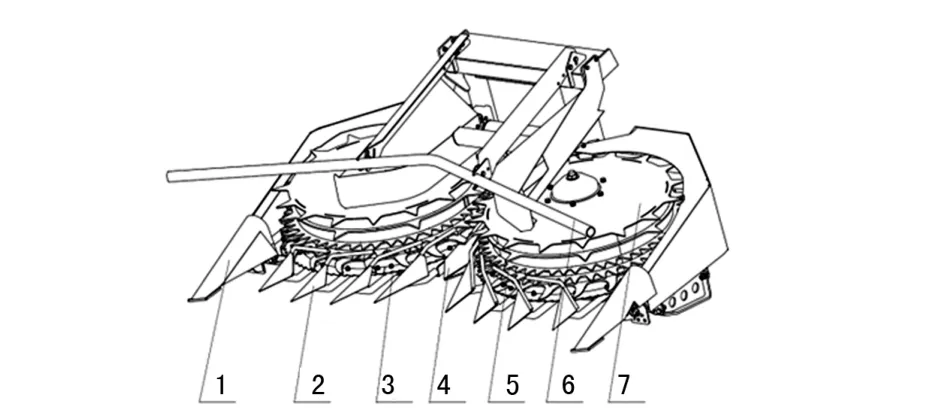
图2 9QZ-200 自走履带式青贮收获机割台示意图
2.3 料 仓
设计料仓容积为3.2 m3,主要由料仓主体,料仓举升油缸,卸料马达,链板传输装置等构成,如图3 所示。

图3 料仓示意图
由于青饲料受休止角、堆积容重及料仓倾角的影响,若料仓翻转角度小于青饲料的休止角,则不能将青饲料完全倒出,严重影响收获机的生产效率,若增大翻转角度,料仓自身及青饲料的重量将导致整机的重心发生偏移,降低了收获机的稳定性,可能发生翻车现象,危及驾驶员的生命安全。 本料仓在侧翻式料仓上增加了链板传输装置,当举升油缸将料仓升至最大高度时,料仓倾角为30°,青饲料不能完全倒出,此时卸料马达驱动链板传输装置工作,可将剩余的青饲料全部倒入车厢。 本设计结构简单,操作方便,不仅提高了料仓卸料的效率,也增加了机器自身的安全性[6]。
3 田间生产试验
田间生产试验是通过样机在生产实际中正常情况下一定工作量的使用,考核样机的可靠性,动力的配套性,性能稳定性,使用的经济性,地区、作物的适用性,调整保养方便性等性能[7]。 因此以机器生产率、收获损失率、标准草长率、平均割茬高度等作为机器性能的评价指标,开展田间试验,并通过试验获得的一手数据以指导样机优化设计和生产工艺技术改进。
3.1 实验条件与材料
为验证9QZ-200 自走履带式青饲料收获机是否满足全株玉米的收获和工艺技术要求。 2021 年9 月在武威市黄羊镇依据标准《GB/T 10394.2—2002 饲料收获机械 第3 部分:试验方法》、GB/T 10394.4-2009《饲料收获机第4 部分:安全和作业性能要求》、GB/T 21961-2008《玉米收获机械 试验方法》及GB/T 8097-2008《收获机械 联合收割机 试验方法》进行了试验,试验地长度大于100 m,地形平整坡度为0。试验主要使用仪器、工具有转速表、天平、宾州筛、秒表等。
3.2 试验方法
3.2.1 生产率试验方法
在样机作业范围内任取3 个行程,每个行程长度为100 m,记录机器完成此行程作业所用的时间,计算3 个行程的生产率平均值作为机器的生产率。计算公式为:

式中:E为生产率,t/h;B为割幅宽度,m;Vj为试验机器前进(作业)速度,km/h;K为割幅宽度的利用系数,% ;Qc为作物每公顷产量,t/hm2。
3.2.2 标准草长率
标准草长率是指标准长度的碎秸秆质量占其总质量的百分数。 在作业区域内,选取3 个测点,测定值通过3 次平行试验与3 次重复试验取平均值获得,即每次取样将样品分为3 份进行平行试验,取样3 次进行3 次重复试验。 每次取样待整机正常作业收获时,在抛料筒出口处接样,取切碎物料样本1 200 ~1 500 g,分为3 份,每份质量400~500 g,分别称重计为小样质量Gy,单位为g,用宾州筛将非标准的切碎物料筛分出来,计算3 个测点标准草长率平均值。计算公式为:

式中:Sc为标准草长率,%;Gc为标准长度草的总质量,g;Gy为小样质量,g。注:标准长度草系分别指设备给定的最大、最小切碎尺寸的0.7~1.2 倍范围内。
3.2.3 割茬高度测定
在每个行程测区长度方向上测定3 点,测定每点1 m×1 m 范围内秸秆留茬高度,测量割茬切口至地面(垄顶)高度,取其平均值。
3.2.4 损失率测定
在测定区域内等间距选取3 个测点,每个测点取1.5 m×1.5 m 范围作为测定区域,称量此区域内收获秸秆的质量,同时收集收获时损失的秸秆并称重,计算3 个测点收获损失率平均值。 计算公式为:

式中:S为收获损失率;W1为测定区内收获的青饲料总质量,kg;W2为测定区内漏割、落地等损失青饲料总质量,kg。
3.3 试验结果
本机在武威市黄羊镇对全株玉米进行了田间试验,样机如图4 所示。 通过田间试验测得样机的性能数据,如表2 所列。

表2 试验结果

图4 4QZ-200 自走履带式青饲料收获机田间试验
4 结 语
针对国产机型以轮式结构居多,不适合丘陵、山地地区的青饲料收获作业现状,通过设计、计算及分析,研制了一种自走履带式青饲料收获机。 田间试验表明:9QZ-200 自走履带式青饲料收获机生产率可达11.99 t·h-1,标准草长率为86.14%,割茬高度为125.98,收获损失率为2.76%,安全性、可靠性、适应性等达到设计要求,满足生产作业需求,可一次性完成青贮饲料的收获、切碎、抛送、集料及装车功能,整机结构紧凑、动力匹配合理、稳定性好、操作方便、工作效率高,尤其在开道作业、泥泞环境作业和小型地块作业方面,表现出了较好的适应性,达到了适用于丘陵、山地和小地块,作业范围广,适应性强的设计目标。
该机的研制可降低工作强度,提高青贮饲料收获效率,为实现养殖产业化、集约化、规模化发展提供支撑,有利于促进劳动力就业、脱贫增收,对我国农业产业结构调整、转型升级、提质增效、扶贫攻坚起到巨大的支撑和保障作用,为我国农业及养殖业的长期协调健康发展提供技术支持。
