基于宇称时间对称原理的无人机无线充电技术*
2022-11-28郑萃翀肖文勋唐哲人
郑萃翀,肖文勋,唐哲人
华南理工大学电力学院,广东 广州 510640
无线电能传输(WPT,wireless power transfer)实现了电源与负载之间的完全电气隔离,具有灵活、安全和可靠等特点。目前,WPT 技术已广泛应用于电动汽车、手机和机器人充电中[1-4]。同时,无人机作为一项新兴技术,极大推动了电力巡检、边境巡防等行业的发展。WPT 技术为无人机续航提供了一种理想的解决方案,是推动工业无人化、智能化的关键一环[5-6]。
目前,已有一些学者对无人机无线充电技术展开了研究。文献[7]研究了采用空心拾取线圈进行无人机无线充电,但系统传输功率较低,效率仅为63.4%。文献[8]提出了在无人机起落架底部装设小型平面线圈,该方案不会对无人机底部设备产生干扰,但系统对于错位容忍度低。文献[9]提出了一种采用原边功率闭环控制进行恒流-恒压充电的无人机无线输电拓扑,但该方法抗偏移能力差且需要原副边通信,容易受延迟或电磁干扰的影响,从而影响系统稳定性。
由文献分析可知,无线充电技术在无人机充电领域存在系统抗偏移能力差、锂电池的恒流-恒压充电控制、拾取线圈对无人机自身设备的干扰等亟待解决的问题。因此,本文提出一种基于PT对称的原边控制方法,PT 对称系统指的是经过宇称-时间反演变换时系统特性保持不变,而在单独的时间反转或是单独的宇称反转时系统特性发生变化的一类系统[10-11]。基于PT 对称的WPT 系统可以自动实现与耦合系数无关的恒定输出功率和恒定传输效率,无需原副边通信及副边控制,可以解决无人机无线充电抗偏移能力差的问题。
1 宇称时间对称无线充电系统
1.1 系统建模
S-S 型无线电能传输系统的电路模型,如图1所示。-Rn为交流功率源,RL为负载,L1、L2为发射、接收线圈自感,M为两线圈之间的互感,C1、C2为发射、接收端补偿电容,r1、r2为发射、接收线圈内阻。

图1 S-S型无线电能传输系统Fig.1 S-S magnetic coupling resonant WPT system
对图1列写电路方程,为
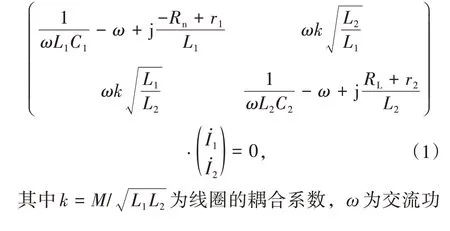
根据式(2),分别讨论ω=ω0与ω≠ω0两种情况下的解。
1)当ω=ω0时,系统工作在PT 破碎态,由式(2)解得

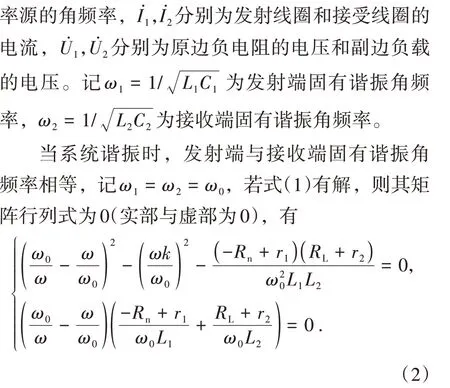
将式(3)代入式(1),可推导出系统在破碎态区域的输出功率PL、效率η表达式为
此时,系统与S-S 型磁耦合无线电能传输系统等效。由于ω=ω0,系统恒工作于谐振频率点f0.
2)当ω≠ω0时,系统工作在PT 非破碎态,自然满足

即

将式(2)、(6)代入(1),可得
由(7)~(9)式,推导出系统在非破碎态区域的输出功率和效率为


由式(10)、(11)可知,系统输出功率、效率均与耦合系数无关,系统具有很强的抗偏移特性。输出功率仅由功率源输出电压、负载、发射和接收线圈自感的比值以及线圈内阻决定;效率仅由负载、发射和接收线圈自感的比值以及线圈内阻决定。线圈内阻越小、RL越大,系统效率越高。
将式(6)代入式(2),得
其中kc为临界耦合系数。当k>kc时,系统处于PT对称非破碎态,即磁耦合谐振中的过耦合区域;当k=kc时,系统处于临界耦合状态;当k<kc时,系统处于PT 对称破碎态,即磁耦合谐振中的欠耦合区域。为保证系统工作于非破碎态,在系统参数设计时,必须满足k>kc并留取一定裕度。
3) 记接收侧品质因数Q2=,由式(13)得
式中f0=ω0/2π。归一化频率f/f0与k和Q2的关系,如图2所示。
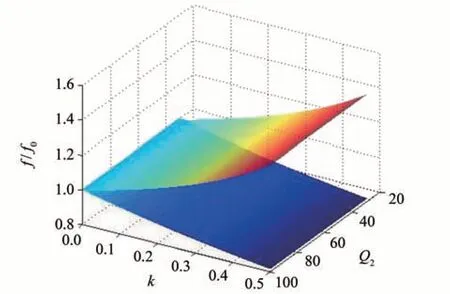
图2 非破碎态PT对称系统频率特性Fig.2 Frequency characteristics of non-broken PT symmetric system
在过耦合区域,工作频率向固有谐振频率f0的两边偏移,分裂成为高频分支fH和低频分支fL.随着k的减小,与逐渐汇聚至f0.可以看到,相较于受耦合系数的偏移影响更小,并且两个分支几乎不受Q2的影响。在实际中,非破碎态PT 对称系统仅能稳定工作于其中一个频率分支fL或fH.
1.2 基于宇称时间对称的原边控制技术
针对无人机轻便化与恒流-恒压充电的需求,本文提出一种基于PT 对称的原边控制系统,如图3 所示。该控制技术不涉及副边控制与原副边通信,副边电路可以尽量简化。图3 中,Uin为输入直流电源,Ud为Buck 变换器输出电压,也是全桥逆变器输入直流电压,Ro为负载等效电阻,ro为锂电池等效欧姆电阻,Uoc为锂电池空载电压。该控制包括逆变器自振荡控制和原边Buck 变换器的闭环调节控制两个部分。
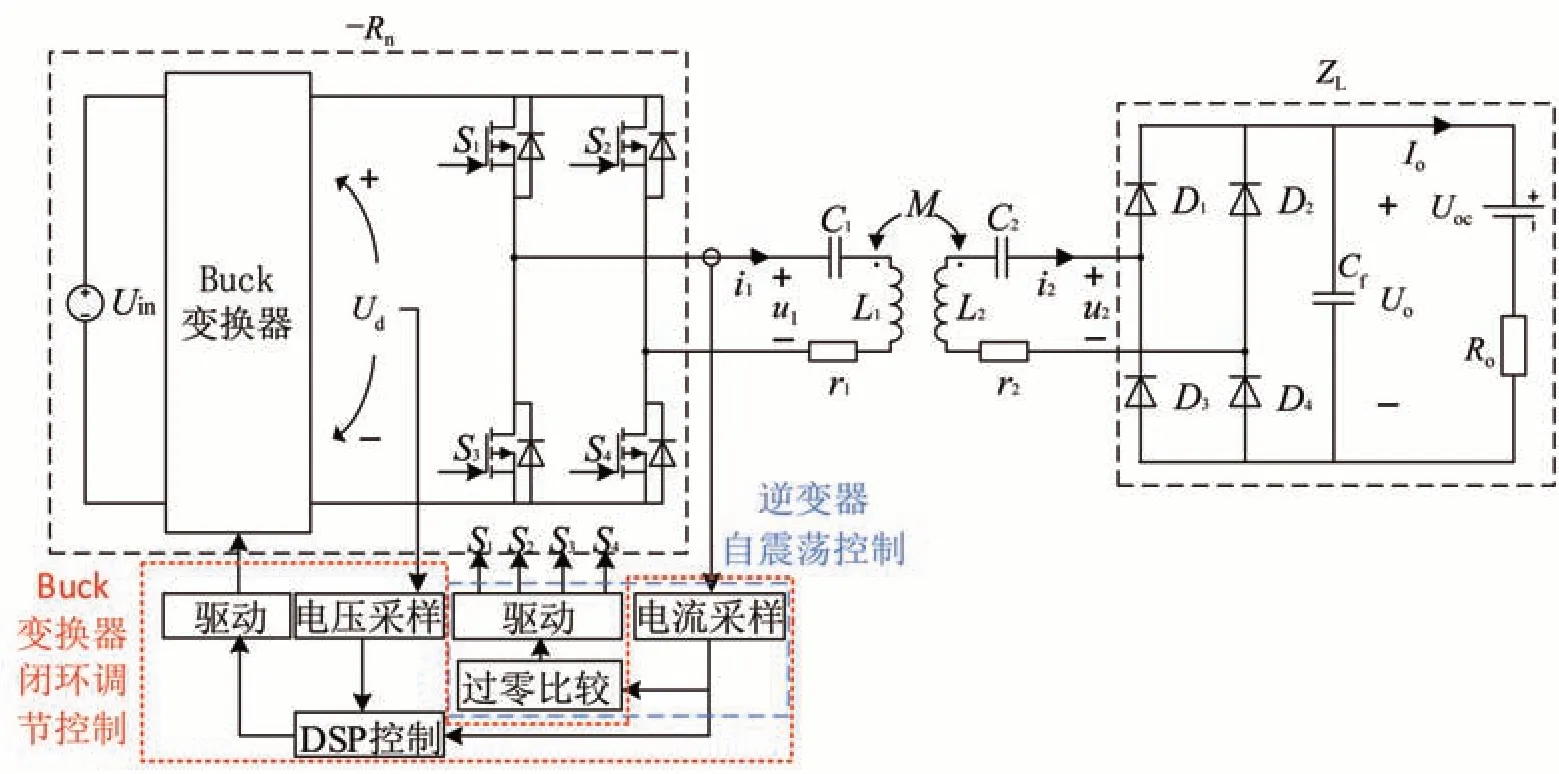
图3 基于宇称时间对称原理的原边控制方法系统框架Fig.3 System framework of primary edge control method based on PT symmetric principle
逆变器自振荡控制采用模拟控制方式,通过采样逆变器输出电流i1进行过零比较,经过驱动环节最终驱动逆变器开关管。逆变器输出电压u1始终与输出电流i1保持同相位,方波u1的幅值等于Ud,其有效值U1与的关系为

Buck变换器闭环调节控制采用数字控制方式,通过采样Ud以及全桥逆变器输出电流有效值I1,利用DSP 执行控制算法,最终控制Buck 变换器占空比,实现恒流-恒压充电控制。
接收侧采用全桥整流电路,输入电流i2为正弦波,电池电流Io与电流i2的有效值I2的关系为



由上推导出输出端电池电流Io、电池电压Uo、负载等效电阻Ro为

式中L1、L2、r1、r2可以通过阻抗分析仪进行测量。频率在150~200 kHz 范围内变化时,线圈内阻变化小于0.02 Ω,可以认为基本保持不变;两线圈发生垂直距离、水平偏移距离变化时,由于发射侧与接收侧线圈结构、铁氧体结构均对称且相同,因此L1与L2的比值基本保持恒定。
通过对PT 对称无线电能传输系统的分析,得到了接收侧参数估计式。这表明通过采样发射端的Ud与I1,不仅可以进行负载识别,而且可以得到电池电流与电压的估计值,从而进行相应的控制,全程无需检测互感值,且不需要原副边通信。
2 原边控制系统设计
2.1 锂电池充电曲线
目前,无人机电池大多为动力锂电池,恒流-恒压分段式充电不仅可以缩短锂电池充电时间,提高锂电池充电效率,并且可以延长电池寿命。本文选用规格为5 300 mAh/11.1 V 的无人机动力锂电池作为负载进行研究,该电池允许快速充放电,能够承受1C 充电速率下的充电电流。1C 是指1 小时充满电池,对于该款电池的容量而言,恒流充电电流为5.3 A,恒压充电电压为12.6 V。设定充电电流为0.2 倍恒流充电电流时停止充电,该款锂电池恒流-恒压充电曲线如图4所示。充电过程中,锂电池等效欧姆电阻ro逐渐增大,对应的等效负载电阻Ro也在增大。
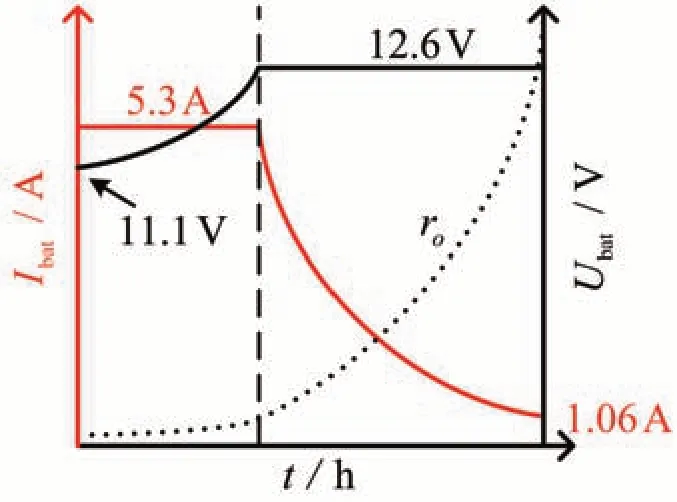
图4 恒流-恒压充电曲线Fig.4 Constant current-voltage charging curve
2.2 控制算法与流程
当负载发生变化时,可通过式(19)、(20)得到电池电流、电压的估计值,通过PI算法产生PWM信号驱动发射端Buck 电路的开关管,从而实现恒流或恒压控制,控制算法框图见图5。
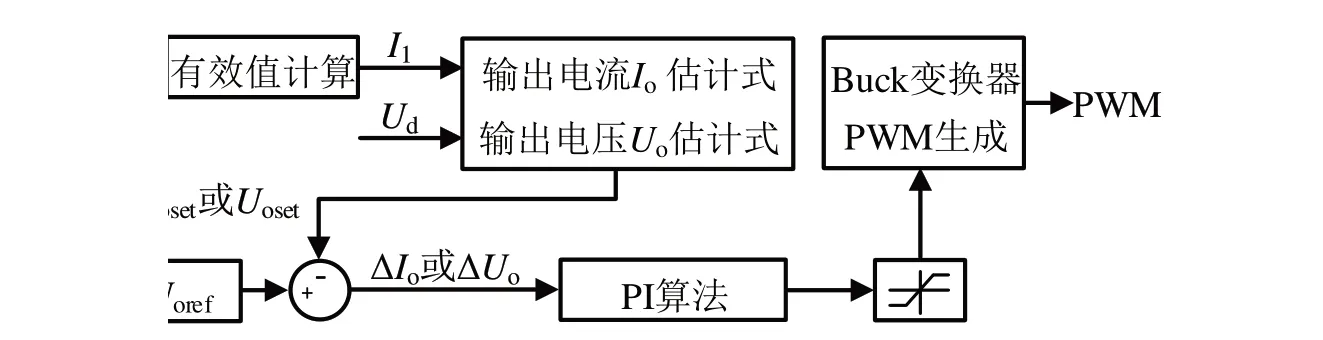
图5 电池电流、电压控制算法框图Fig.5 Block diagram of battery current and voltage control algorithm
以上参数估计式与控制算法均以PT 对称无线电能传输系统为基础,因此必须保证系统工作于非破碎态区域,可以通过检测i1的频率判断系统是否处于k>kc区域。当系统处于破碎态区域时,发出错位警告并重新定位。对于该系统而言,可允许线圈之间8 cm 以上的水平偏移以及8 cm 以上的垂直传输距离,可满足绝大部分无人机无线充电应用场景。根据锂电池恒流-恒压充电曲线,不难计算出充电开始、恒压恒流切换、充电结束时对应的负载等效电阻RL分别为2.09、 2.38、11.89 Ω。根据式(21)进行负载识别,判断当前电池的充电阶段,并执行相应的控制算法。恒流-恒压充电控制流程见图6。
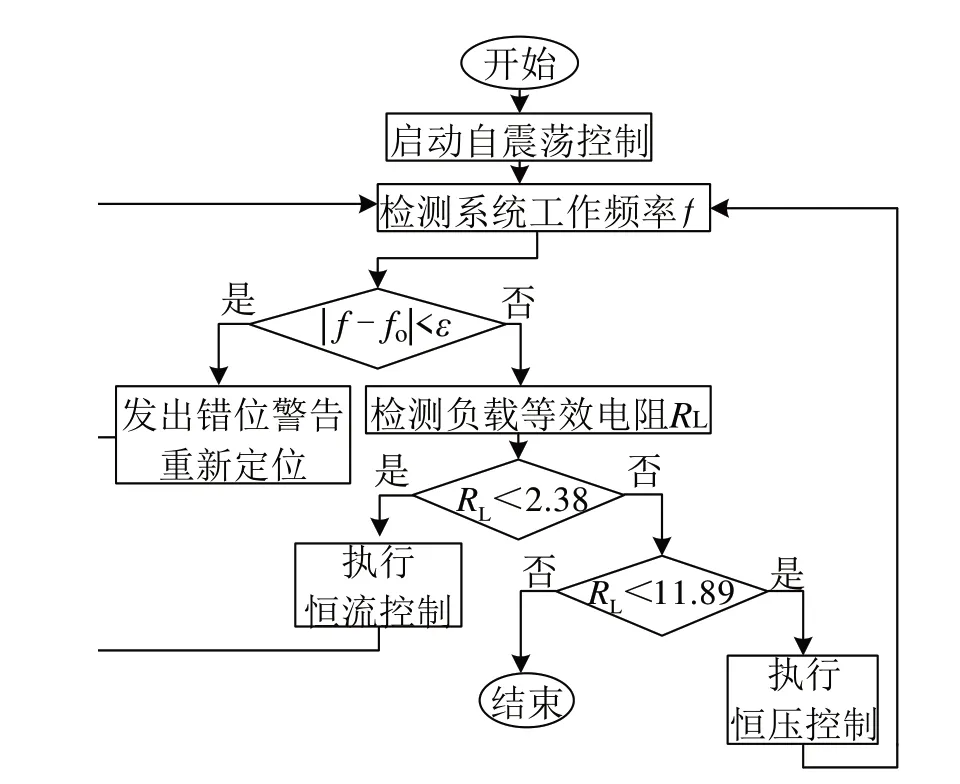
图6 恒流-恒压充电控制流程图Fig.6 Constant current-voltage charging control flow chart
3 实验验证
3.1 实验设计
为了验证所提出的锂电池充电控制方法,搭建如图7所示的实验样机。实验中,负载由直流电子负载提供,以模拟实际锂电池充电特性。实验样机的具体参数见表1,PI 控制器的参数设定为比例系数P=1,积分系数I=0.002。
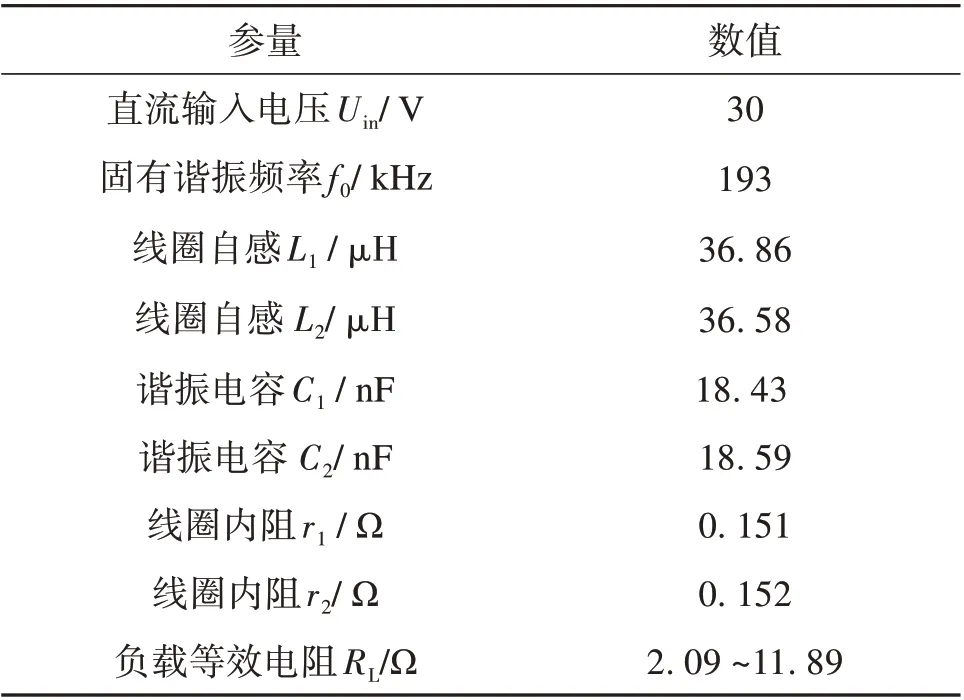
表1 实验参数表Table 1 Experimental parameters table
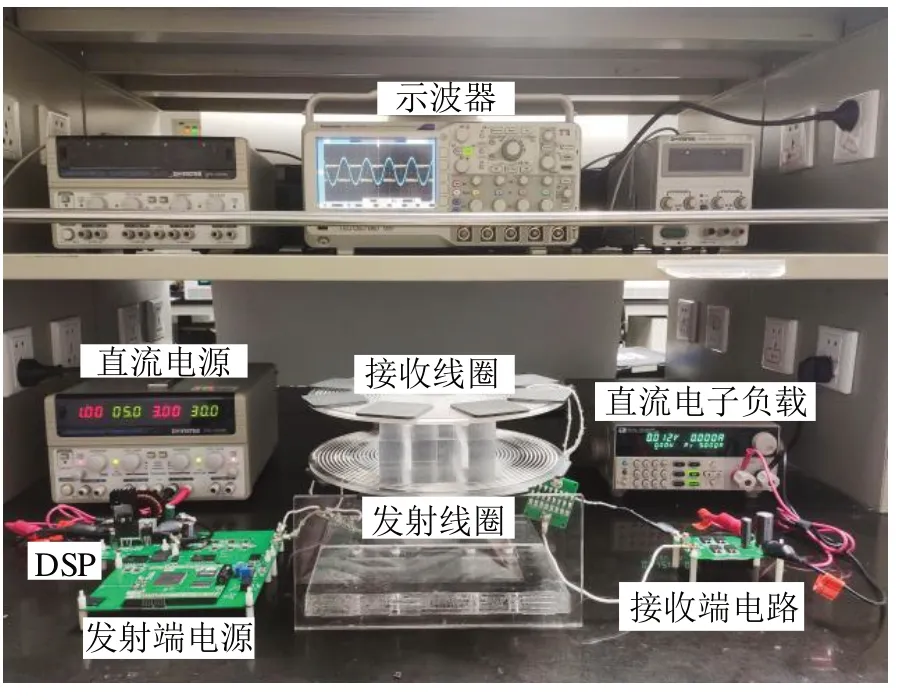
图7 PT对称无线输电样机Fig.7 PT symmetric wireless transmission prototype
为提高PT 对称无线充电系统的工作范围,减少对无人机本身设备的干扰,接收线圈采用空心结构并悬挂于无人机机翼下方,方便无人机腹部支架与摄像头穿过。同时,添加铁氧体薄膜不仅增强了线圈磁屏蔽效果,也增大了线圈之间的耦合程度。在Maxwell中绘制线圈模型并进行磁场仿真,空心接收线圈如图8所示,发射线圈结构与接收线圈相同。从磁场仿真结果中可以看出,空心接收线圈的磁场主要集中于线圈外围,线圈内径中空部分磁通密度很低,对穿过其中的无人机自身设备影响较小。

图8 空心接收线圈Fig.8 Hollow receiving coil
3.2 结果及分析
首先对样机在不同水平偏移距离和传输距离下的传输特性进行了研究。将负载设置为2.3 Ω,即Ro= 2.3 Ω,此时为恒流充电阶段,实验波形见图9和图10。
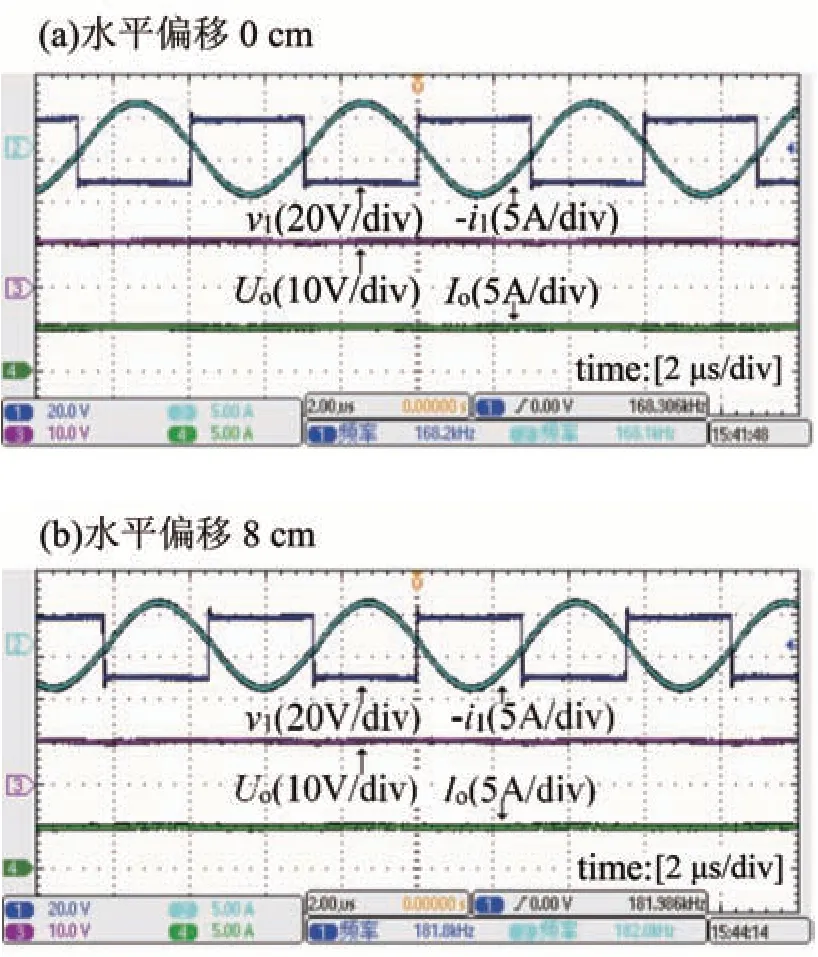
图9 不同偏移距离的实验波形Fig.9 Experimental waveforms of different offset distance
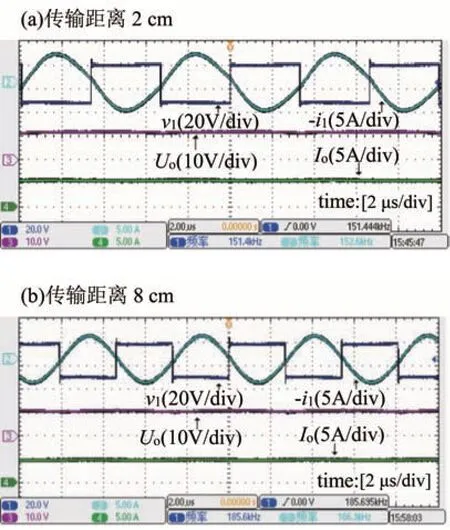
图10 不同传输距离的实验波形(偏移距离为0 cm)Fig.10 Experimental waveforms of different transmission distance(offset distance is 0 cm)
由图可知,通过逆变器自振荡控制,系统工作频率小于固有谐振频率,系统工作于低频分支fL。在不同的传输距离与水平偏移距离,系统可以自动选择工作频率,当水平偏移距离由0 cm 变为8 cm 时,系统频率由168.2 kHz 自动调整为181.8 kHz;当传输距离由2 cm 变为8 cm 时,系统频率由151.4 kHz 自动调整为185.6 kHz。逆变器输出电压u1与输出电流i1基本保持同相,输出电流Io稳定在参考值5.3 A,由于电子负载不变,输出电压Uo同样稳定。在传输距离、偏移距离变化的过程中,功率稳定在64.6 W 左右,效率稳定在78%左右,系统具有很强的抗偏移特性,实验结果见图11。
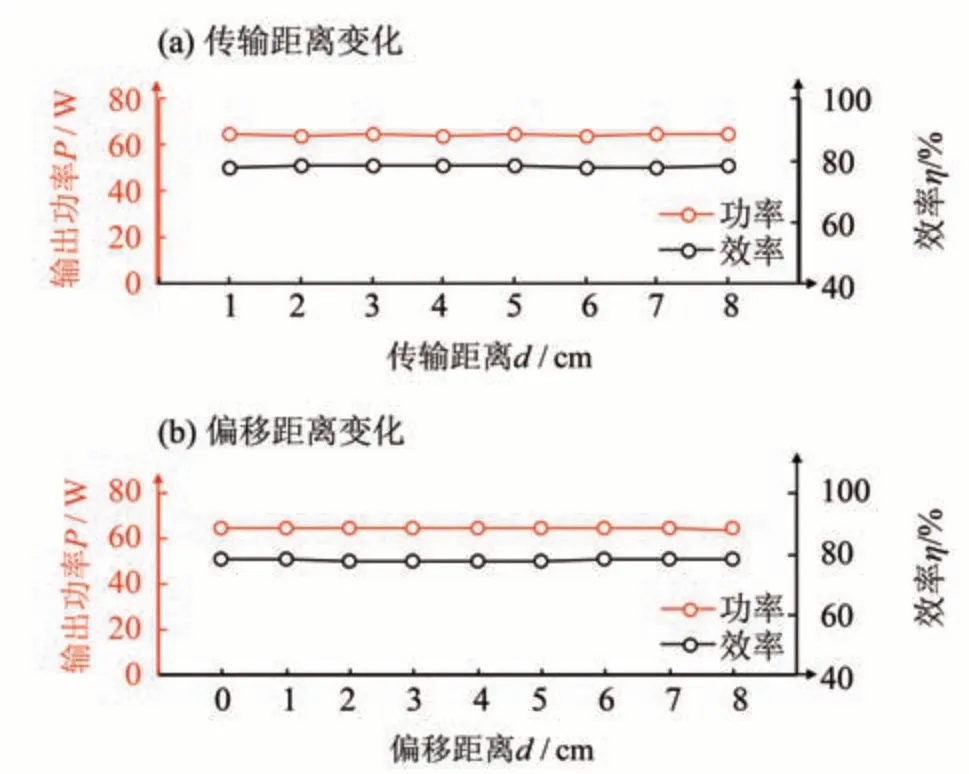
图11 系统传输特性随传输距离与偏移距离变化Fig.11 The transmission characteristics of the system vary with the transmission distance and offset distance
设定传输距离为4 cm,水平偏移距离为0 cm,改变负载Ro,可得恒流与恒压阶段的动态响应波形如图12 所示。由图12 可知,对于恒流控制阶段的负载变化,输出电流稳定在参考值5.3 A;对于恒压控制阶段的负载变化,输出电压稳定在参考值12.6 V。电池电流、电压随负载变化的曲线如图13 所示,随着负载的增加,系统先进行5.3 A 恒流充电,而后进入12.6 V 恒压充电,所提出的恒流-恒压控制策略正确有效。整机效率如图14 所示,整机效率与负载大小有关,负载电阻越大,效率越高,效率最高接近90%。

图12 负载切换实验波形图Fig.12 Load switching experiment waveform
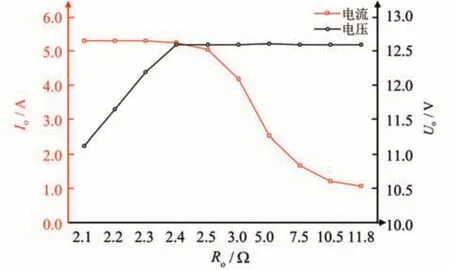
图13 电池电流、电压随负载变化Fig.13 Battery current and voltage vary with load
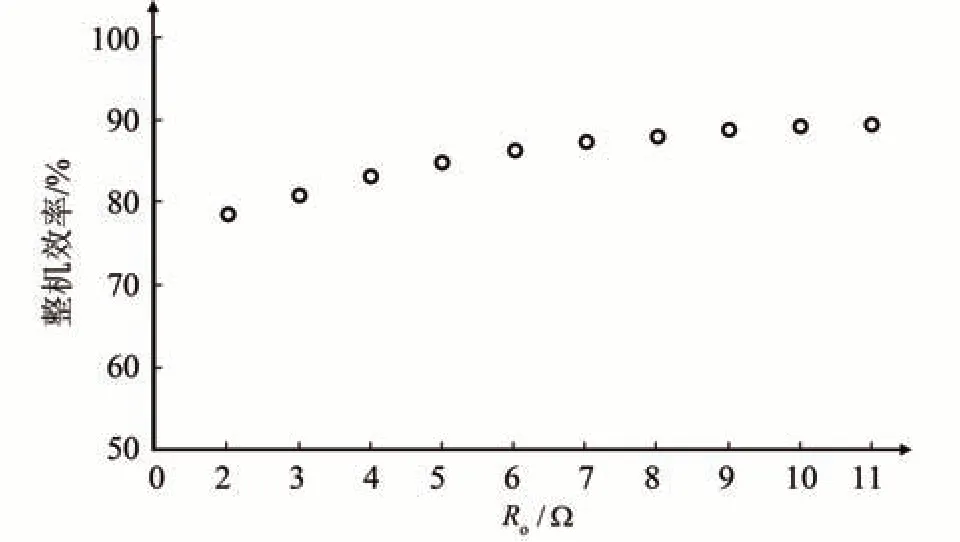
图14 整机效率Fig.14 Overall efficiency
4 结 论
本文提出了一种基于PT 对称原理的无线充电系统,采用原边控制技术实现对无人机锂电池的充电控制,减轻了机载负重,控制系统无需原副边通信及互感检测,具有较强的适用性。实验结果表明,该系统传输距离远、抗偏移能力强,可实现锂电池恒流-恒压充电,系统可有效传输65 W充电功率,整机效率最高接近90%。