空地一体三维建模方法在洞窟开发中的应用
2022-11-26聂长虹徐云和朱婷婷包滕龙胡年艳
沈 佳,聂长虹,徐云和,张 伟,朱婷婷,孙 骏,包滕龙,胡年艳
(1.速度时空信息科技股份有限公司,江苏 南京 210000)
随着城市的发展建设,防空洞“天然冷库”的优势使其受到广泛关注,大量的防空洞被改造成避暑旅游景点、商场、博物馆等设施。洞窟内外一体化三维模型在其改造过程中发挥着极其重要的作用。
目前,无人机倾斜摄影测量和三维激光点云扫描是两种比较典型的三维建模方式,可分别用于建立洞窟内部和外部三维模型。无人机倾斜摄影测量技术能在大面积区域、地形复杂区域和突发自然灾害区域快速获取高分辨率影像[1],具有操作容易、数据采集灵活、时效性高、云下飞行等优点,在数字城市建设、桥梁检测、滑坡调查、地形图测绘等方面具有广泛应用[2],但受飞机作业模式的限制,无法获取地物内部的数据信息。地面三维激光扫描可突破传统测量方法单点测量的局限性,具有非接触式、高效率、高精度获取物体表面三维点云数据的优势[3-5]。同时,扫描仪设站灵活性大,可深入洞窟内部,获取洞窟内部表面点云数据,可在古建筑物保护[6]、形变监测等领域发挥重要作用;但由于仪器本身的局限性以及目标高度对观测视角的限制,地面激光扫描仪很难获取目标上部的数据信息。综上所述,有必要开展多源数据融合建模技术研究,在充分发挥单一技术建模优势的基础上,利用其他技术弥补自身不足[7]。因此,本文将无人机倾斜摄影测量技术与地面三维激光扫描技术进行整合,通过空地融合的方式建立洞窟与山体一体化三维模型。
1 研究区概况与研究方法
本文首先利用无人机摄影测量技术获取地表高分辨率影像数据,并经过空三加密、控制网平差等内业处理获取山体外部三维模型;再根据洞窟内部的地形特点,布设扫描仪测站,获取点云数据和纹理图像数据;然后根据扫描站和靶标坐标,经过点云配准、坐标系转换、点云拼接等内业处理获取洞窟内部三维模型;最后利用ArcGIS Pro软件,以传统测量成果为基准,整合洞窟内外点云数据,生成洞窟内外一体化三维模型。
1.1 研究区概况
本文选取的研究区位于安徽省六安市裕安区,地处大别山北部边缘,是以丘陵为主的低山地貌。研究区内包含多个非直线式洞窟,且洞窟内无任何设备设施,处于封堵状态。
1.2 数据获取
1)传统测绘数据采集。在每个洞窟的出入口设置两个图根点,利用GPS-RTK对图根点进行测量,利用全站仪进行洞内导线引测,共测得40个洞口图根控制点、58个洞内导线点数据。
2)无人机航测数据采集。本文利用多旋翼无人机航测系统进行洞窟外山体数据的采集。根据测区范围,将其分为5个区块进行航测;以实地踏勘的方式确定各条洞窟分布位置,并据此设置航摄基准面、航高、航线、影像重叠度、航摄时间等基本信息,完成数据采集。
3)地面三维激光扫描。本文利用FARO Focus 3D X130产品[8]采集各条洞窟内部详细数据。洞窟内巷道采用基于标靶球、标靶纸拼接的方式进行扫描,附属房间采用小群集点云拼接的方式进行扫描。根据不同的扫描方式,调整扫描参数,扫描巷道时,站点间距设置为5~12 m,在站点前后4~8 m位置各均匀摆放4个不同高度的标靶球;巷道附属房间以点云拼接的方式进行扫描,无需摆放标靶球,扫描速度快、架站灵活。
1.3 空间数据处理
洞窟内外空间数据处理包括无人机倾斜摄影测量和三维建模、地面激光点云扫描和三维建模、洞窟内外一体化三维建模、标定周界等过程。具体技术流程如图1所示。
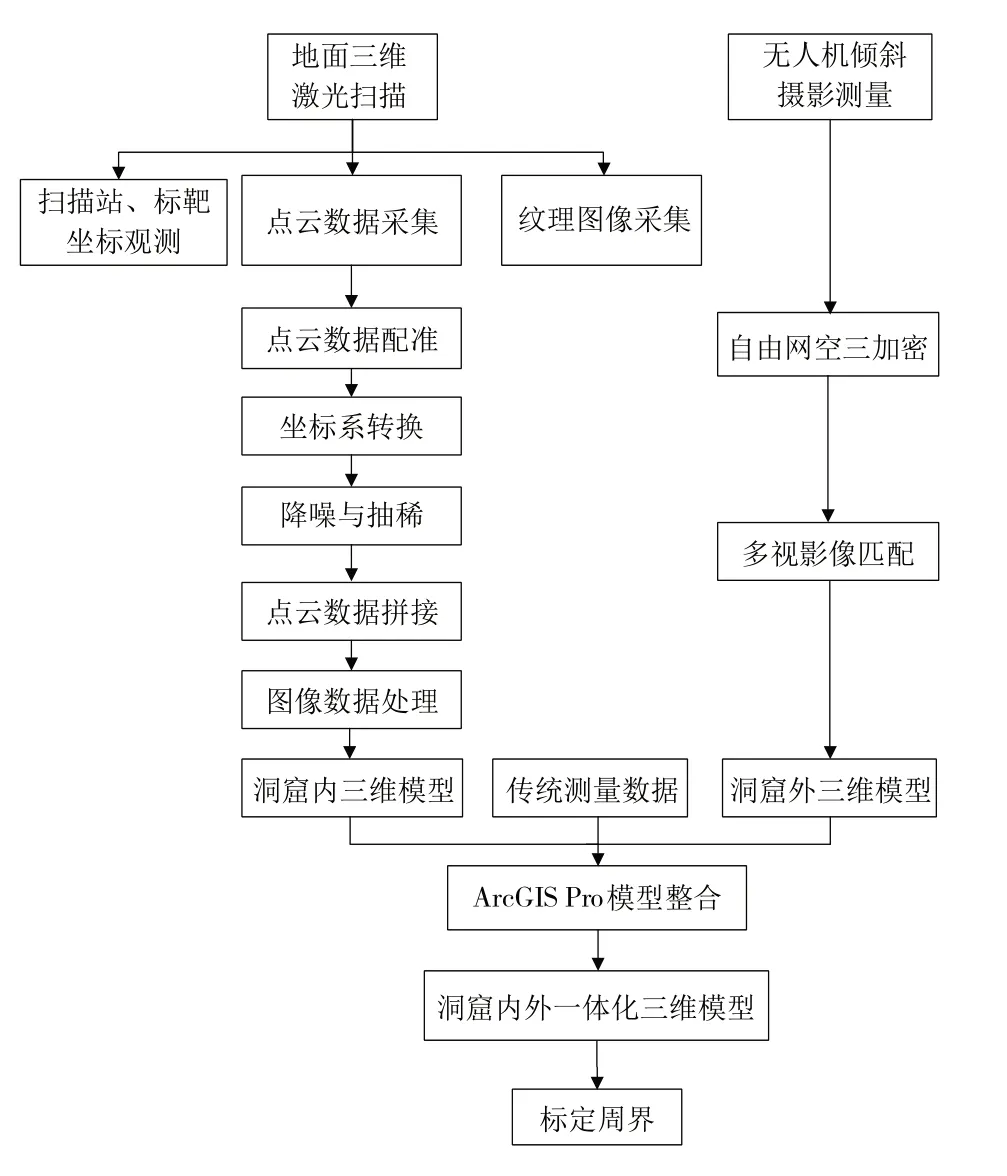
图1 技术流程图
1)无人机倾斜摄影测量和三维建模。本文采用专业航测无人机获得五镜头的多视影像,并通过网络RTK获取曝光点的高精度三维坐标,经坐标系转换、自动空三加密后,即可开始模型生产,可比传统方式节省1/3的内业工作量。
2)地面激光点云扫描和三维建模。利用FARO扫描仪获得地面激光点云数据,在Scene软件中,经过点云数据配准、坐标系转换、降噪与抽稀、图像数据处理和点云拼接等步骤,再导入3ds Max软件中进行纹理贴图等操作,建立洞窟内部三维模型。根据控制点标靶、特征地物点、洞内外导线点进行点云数据配准,并建立统一的坐标系。点云拼接时,对于巷道内点云,需打开拆分视图对标靶球进行一一对应,房间内点云需基于俯视图进行初次拼接;然后将各房间点云小群集与球拼巷道群集进行挂接,得到防空洞内部整体点云数据。激光点云三维模型如图3所示。

图2 倾斜摄影测量三维模型
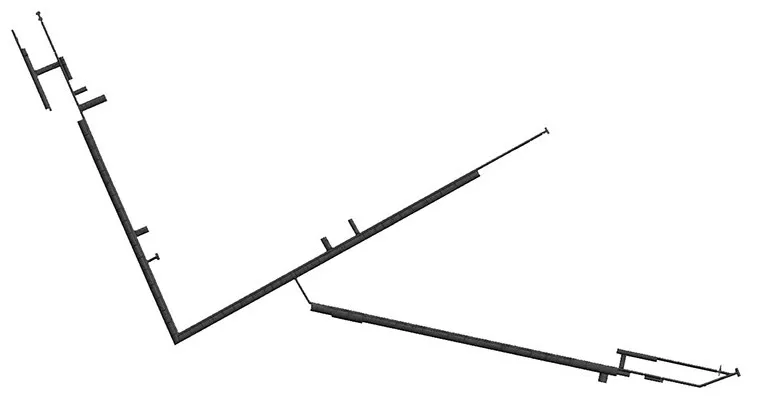
图3 激光点云三维模型
3)洞窟内外一体化三维建模。ArcGIS Pro支持3ds Max软件导出的3ds格式文件以及倾斜模型的slpk格式(osgb文件转换)。将基于倾斜摄影建模获得的洞窟外部山体三维模型与激光扫描建模获取的洞窟内部三维模型一同加载到ArcGIS Pro图层中,根据传统测量数据、倾斜模型对洞窟内部3ds格式的三维模型进行精确配准,获得洞窟内外一体化三维模型,如图4所示。

图4 洞窟内外一体化三维模型
4)标定周界。因洞窟在山体内部,山体表面无法看出洞窟的位置和大致走向。本文借助三维模型成果图,在山体表面标定各条洞窟的周界,便于后期旅游规划、游戏开发、真人探险以及在洞窟内对地形的探索。本文利用ArcGIS Pro软件融合后的洞窟内外一体化三维模型,标绘各条洞窟洞口平面位置(图5),局部放大后可查看任意洞窟在山体的详细位置。其中一个洞窟在山体内部的位置与走向如图6所示。

图5 各条洞窟洞口位置分布图

图6 某一洞窟在山体内部位置、走向与洞口位置分布图
1.4 精度评定
1)倾斜模型精度验证。为验证倾斜模型的精度,本文将实测三维坐标与模型拾取的特征点三维坐标进行比较,采用同精度检测方法抽取验证97个点,结果如表1所示,平面中误差为±9.1 cm,高程中误差为±7.7 cm,模 型 误 差 为±11.9 cm。根 据CH/T 9015-2012《三维地理信息模型数据产品规范》中对三维模型表达的精度要求,上述结果满足丘陵地形1∶500比例尺三维模型精度要求。
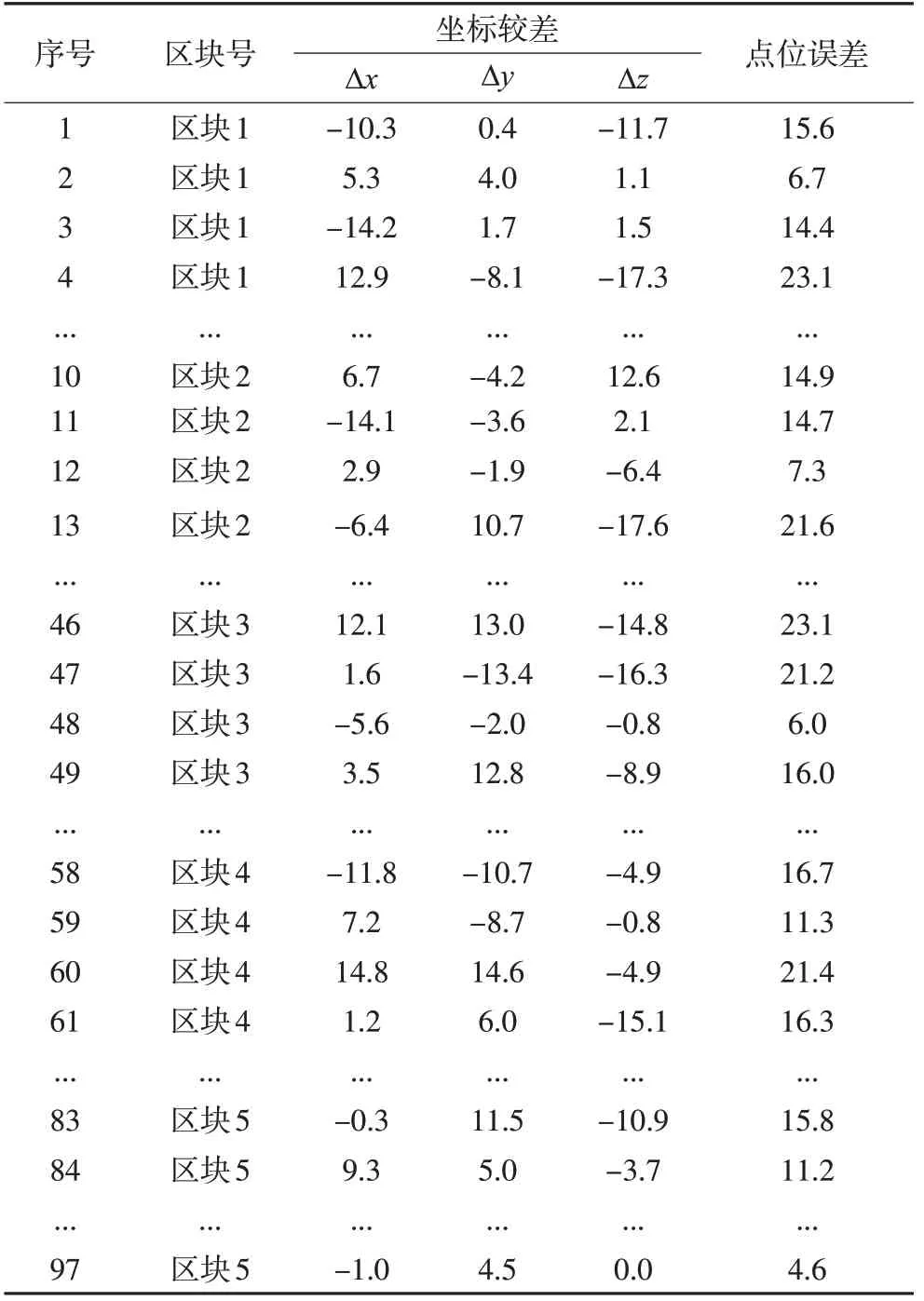
表1 模型三维精度统计/cm
2)点云拼接精度评定。本文中洞窟巷道内采用标靶球拼接的方式进行点云拼接,房间内采用特征地物点拼接的方式进行点云拼接,最后进行洞窟巷道内点云数据与房间内点云数据的拼接,因此需对3个步骤中所有拼接部分进行精度评定,采用同精度检测方法,点位剔除1个粗差,结果如表2所示,内符合精度平面中误差为8.67 cm,高程中误差为12.33 cm,点位中误差为11.42 cm;外符合精度的平面中误差、高程中误差、点位中误差分别为12.2 cm、11.98 cm和16.9 cm。依 据CH/T 3020-2018《实景三维地理信息数据激光雷达测量技术规程》的点云数据配准规定,本次点云数据拼接精度满足要求。
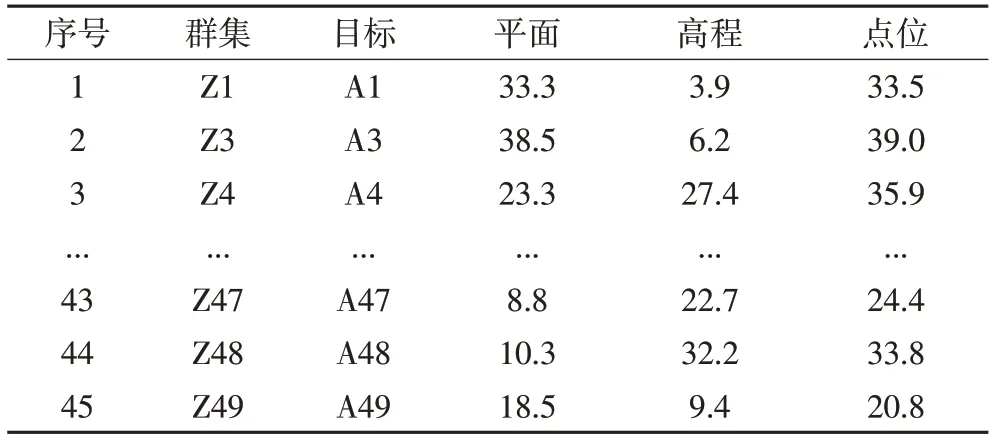
表2 点云拼接精度统计/cm
2 应用领域介绍
一体化三维模型在多源数据融合与直观展示、城市规划与管理等方面具有重要的基础性作用。本文以洞窟一体化三维模型为基础,以洞窟旅游开发为例,阐述了三维模型在景区建设与管理等方面的作用。
1)融合多源数据。一体化三维模型可为多源数据(基础地理数据、矢量数据、权属数据、现场调查数据和多媒体数据等)的融合提供载体,模型上即可实现量测长度、计算面积、计算坡度坡向、查询权属信息等功能,为景区规划提供全面的数据支持,极大地减少了外业工作量。
2)整体规划。一体化三维模型能对洞窟内外环境进行全面展示,规划人员可依据三维模型直观感受洞窟内外部基本情况并进行全面规划。例如,在旅游路线规划方面,可根据通过三维模型得到的山体地形、地貌和植被覆盖等数据制定初步线路,并结合实地勘探做出调整,选择最合适的线路。由此可知,以一体化三维模型为基础进行景区规划,可在保障设计合理性的同时,有效提升工作效率。
3)实景展示与交互体验。景区开发完成后,可通过实景三维模型向游客展示景区环境、房屋、道路以及各洞窟内部游览项目;游客可通过相关链接自主设计规划路线,高效游玩景区,提高游客的体验感和景区的竞争力。
4)景区三维管理。以一体化三维模型为基础,叠加景区的资产数据、基础设施数据和监控等应急设施数据,构建三维管理平台,可极大地方便景区的日常管理,提高管理效率。例如,在资产管理方面,可对景区的建筑物、设备、文物和陈列品等固定资产进行可视化管理;在基础设施管理方面,可实现景区地下管线浏览、查询、定位等功能;在应急管理方面,可将监控等应急设施链接至三维管理平台,实现重点区域的实时监控,保障游客安全。
3 结语
本文在阐述无人机倾斜摄影测量技术生产航摄三维模型、地面激光扫描作业生产三维点云模型的基础上,进一步尝试将二者进行融合配准,开展了洞窟内外一体化建模的新应用,同时探寻了空地融合一体化建模方法在洞窟整体规划、实景展示与交互体验、景区三维管理等方面的新角色。地面三维激光扫描技术可在洞窟狭窄、内部黑暗等多种恶劣观测条件下进行外业扫描,大面积快速获取洞窟内部的表面三维坐标数据,最大程度地解决无人机倾斜摄影技术树木遮挡、洞窟内部扫描盲区、相机拍摄角度不理想、黑暗中无法采集纹理等缺点。二者融合构建的洞窟内外一体化三维模型,将不断提高三维建模的能力,为洞窟、防空洞等开发应用提供更加精准、直观的三维分析数据,为旅游开发、应急避难工作带来从二维到三维的革命性跨越。