一种高增益超小型条纹相机及其集成控制系统
2022-11-25张宇驰田进寿薛彦华李知兵李少辉王俊峰刘百玉高贵龙陈萍王兴赵卫
张宇驰,田进寿,薛彦华,李知兵,李少辉,王俊峰,刘百玉,高贵龙,陈萍,王兴,赵卫
(1 中国科学院西安光学精密机械研究所超快诊断技术重点实验室,西安 710119)
(2 中国科学院大学,北京 100049)
(3 极端光学协同创新中心,太原 030000)
0 引言
条纹相机作为有超高时间精度的诊断工具[1-2],广泛应用于超快光学、材料学、生物医学等基础研究领域,还可应用于惯性约束聚变(Inertial Confinement Fusion,ICF)、同步辐射光源、爆轰物理等大科学工程以及国防领域。近年来,基于条纹相机的激光雷达系统逐渐被应用于国土防御(导弹的导航与追踪、敌方伪装载具侦查、水雷探测以及障碍物的规避),海事安全(追踪非法船只、侦查失事船只、鱼群探测),地形地貌探测(3D 海底地貌勘察、海洋波谱分析、水下矿产探测、森林普查)等。此类应用场景要求条纹相机具备高探测灵敏度与高亮度增益,以便探测到更远距离或信号更弱的目标。同时作为水下重要区域目标识别以及副载波调制激光雷达等系统的重要探测设备,为方便无人机载、星载应用,要求条纹相机具备便携化、功能灵活、稳定性高等特点[3-5]。
国际上,目前从事条纹相机研制的单位有日本滨淞(Hamamatsu)、德国Optronis、美国Sydor、加拿大Axis Photonique 等;国内的研究单位有西安光机所、深圳大学、中国工程物理研究院等。前期各研究单位也都推出了各自型号的条纹相机,但是现役条纹相机普遍都因为体积大、笨重的缘故,不适合激光雷达、无人机载/星载等应用场景:如日本滨淞的C10910(体积约为741 mm×345 mm×300 mm,质量约30 kg);德国Optronis 的SC-10(体积约为794 mm×240 mm×250 mm,质量约24 kg),且空间分辨率较低(5 lp/mm);西安光机所通用皮秒条纹相机5 200(体积约为750 mm×260 mm×350 mm),质量约22 kg,具有较大的探测视场及高时空分辨率。为此本文主要针对机载激光雷达系统应用,开发一种高灵敏度高时空分辨的便携化条纹相机。
条纹变像管是条纹相机的核心器件,西安光机所惠丹丹、陈正凯等[6]已为此类应用场景研制出大探测面积超小型条纹变像管;田丽萍、李立立等[3]也研制出像缩小型小型条纹管,其中7 200 型条纹管因其体积小、阴极灵敏度高、亮度增益强的特点,满足上述场景的应用需求。
同时针对机载激光雷达对条纹相机小型化、高可靠性的要求,需要研制一种高集成度、高可靠性的工控系统。前期西安光机所潘宝毅已开发了控制系统V1.0,吕斌开发研制了分布式控制系统V2.0 版本[7-9]。这两个版本已经逐步采取模块化设计,可完成对条纹相机的测控功能,但存在如下不足:高压控制模块需要手动控制,系统集成度低、兼容性及扩展性差、抗干扰能力差,且系统体积庞大,无法适用于超小型条纹相机。因此需要开发一套应用于超小型条纹相机的新工控系统。
本文在7 200 型条纹变像管电子光学设计的基础上,通过理论模拟计算建立了合理多碱阴极结构模型,使得变像管阴极灵敏度突破268 μA/lm,亮度增益突破20.1;通过模块化设计开发了一套具备集成度高、抗干扰能力强、多设备兼容扩展强等特点的新型控制系统,集成度相比工控V2.0 提高了2.36 倍。综合以上研究开发了一种高亮度增益超小型条纹相机,实现了条纹相机在弱光超快过程下高探测灵敏度、高增益、高时间分辨率,以及便携化与小型化的需求。
1 高亮度增益超小型条纹相机
高亮度增益超小型条纹相机由前端输入狭缝光学系统、高亮度小型化条纹变像管、像增强器、电源模块、工控系统、扫描模块、后端光学耦合系统及读出相机等部分组成,其中输入镜头、条纹管、像增强器、输出镜头和CCD 位于一条轴线上,工控模块放置于独立的盒子,实现了机箱的紧凑型设计,结构总体布局如图1。各部分功能及工作原理为:超快现象(光学信号)通过光学系统成像在变像管的光电阴极面上,然后转换为光电子束,光电子在变像管中通过加速、聚焦、扫描后轰击荧光屏,将时间变化的电子像转化成空间分布的光学信号,后经由像增强器增强、CCD 采集输出至上位机进行保存分析。
1.1 超小型条纹变像管电子光学设计
条纹变像管是条纹相机的核心部件,其特性是影响条纹相机性能的最关键因素。本文采用三维电磁仿真软件CST 对高增益小型化条纹管进行了数值模拟计算及优化设计。为了减小像差、提高边缘空间分辨率并增大阴极有效面积,设计上采用球面光电阴极和球面荧光屏,采用CST 模拟计算确定最佳阴极及荧光屏曲率半径及各电极电压。条纹变像管的亮度增益与放大倍率的平方成反比,与电子透过率成正比,为提高条纹管亮度增益:1)将条纹管设计为像缩小型结构,其放大倍率0.7~0.8;2)采用狭缝加速栅极,与传统超精细栅网相比可将光电子的透过率提升30%~40%;3)将阴极负高压提升为-15 kV,即阴极产生的光电子以高达-15 keV 的能量轰击荧光屏,提升荧光屏发光效率。
在光电阴极内表面沿狭缝方向每隔1 mm 位置发射服从一束初始能量、方位角、仰角、初位置服从特定分布[10]的电子束,每束电子束包含3 000 个光电子。利用CST Tracking 求解器追踪电子运动轨迹,得到电子空间点扩展函数,从而计算条纹管的动态空间调制传递函数。图2 是全屏时间为50 ns(扫描速度为1.667×10-3c)时狭缝方向的动态空间调制函数,由图可知,距离阴极中心9 mm 时,荧光屏上动态空间分辨率为30.26 lp/mm@MTF=5%,所设计变像管的放大倍率为0.76,可以计算得条纹变像管光阴极的动态空间分辨率为23 lp/mm@MTF=5%。若取空间分辨率高于20 lp/mm 时的探测面积为有效成像面积,则所设计条纹管的阴极有效长度大于18 mm,是传统条纹管的两倍。从光电阴极中心发射一束电子束,图3 为其时间调制传递函数曲线,可知,当归一化强度值降低至10%时对应的时间频率为41.53 ns-1,则条纹管的极限物理时间分辨率t=1/41.53 ns=24.1 ps。
1.2 条纹变像管研制
条纹变像管是条纹相机的核心部件,其特性是影响条纹相机性能的最关键因素。所研制的变像管输入窗为石英玻璃,采用多碱光电阴极;输出窗为光纤面板,采用P43 荧光粉,发光中心波长在500 nm 附近,荧光屏有效直径Φ为25 mm。
光电阴极的灵敏度决定着条纹变像管的探测灵敏度,为提高光电阴极灵敏度,进行了理论模拟设计及工艺实验研究。条纹管采用了多碱光电阴极Na2KSb(Cs),为三层结构:Na2KSb+K2CsSb+SbCs。吸收层为重掺杂的p 型Na2KSb,为立方晶格结构,主要起吸收光子并产生电子的作用;表面为富Cs 的强n 型K2CsSb 过渡层及SbCs 激活层,主要起降低表面电子亲的作用,能有效地提高整个阴极灵敏度并使长波阈值发生一定的“红移”。光电转换的过程可由三步光电子发射模型解释,价带内的电子吸收光子能量后,激发到导带,光电子经散射输运至真空交界面,能量较高的电子克服表面势垒向真空发射,形成光电子。光阴极结构模型和三步光电子发射模型如图4。
多碱光电阴极利用多次蒸镀法制备,配合膜厚及弱电流监控系统,精确控制阴极厚度以及各元素配比。新的激活工艺使光电子逸出概率更高,从而提升阴极性能,保证了高阴极灵敏度,优化的工艺过程为:1)常温下制备导电基底;2)在180℃同时蒸发Sb 和K,生成K3Sb,在230℃时蒸发Na,当光电流超过极大值并下降一定百分比时,停止蒸发Na;3)在180℃同时蒸发Sb 和K,直至光电流达到极大值;4)重复多次配给Na、Sb、K 交替直至达到合适的厚度;5)在160℃下,Sb、Cs 反复沉积,直至获得最大光电流。过程采用转阴极制备,真空度始终保持在10-7,减少了系统对阴极材料的污染。
图5 为研制的高亮度增益超小型条纹管实物。其外形尺寸仅为158.7 mm×Φ82.3 mm,质量为1.8 kg,相比传统条纹管减小了75%以上。条纹管关键参数如表1。
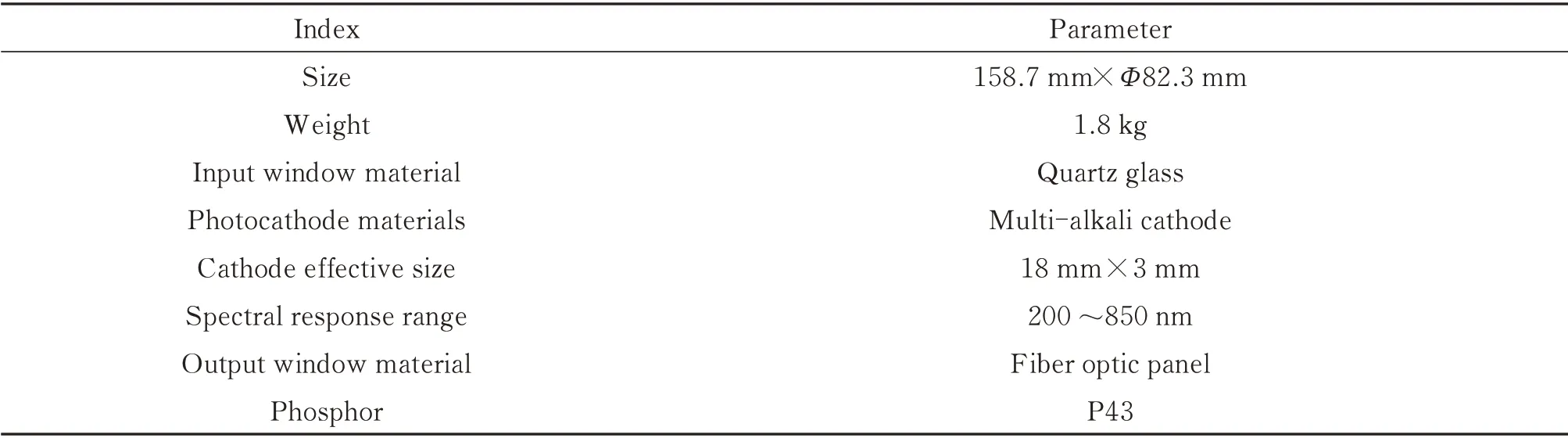
表1 条纹管性能参数Table 1 Streak tube performance parameters
1.3 条纹相机电控模块及其可视化系统
综合分析旧控制系统的缺陷,新控制系统需要在保证各项功能稳定工作的基础上大幅度优化电路集成度,增强长距离通信过程中的抗电磁干扰能力,提高电路的兼容性与拓展性,以便更灵活地应用于紧凑型条纹管[11-13]。图6 为设计的集成控制系统总体架构图。控制功能包括相机总电源、高压电源、增强器选通快门模块的开启关闭,工作模式、扫描模式、扫描档位的选择,延时控制及增益调节;监测功能包括实时反馈条纹管的偏转电压、MCP 板电压、触发信号、脉冲源信号等。系统各功能如表2。
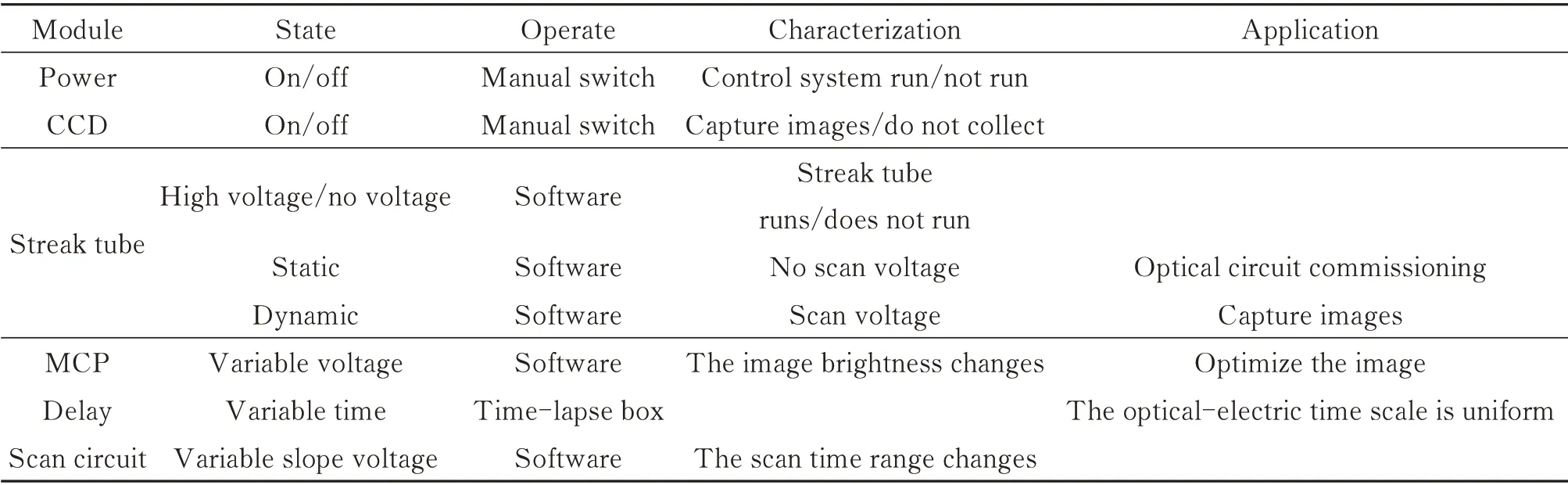
表2 测控系统功能概述Table 2 Overview of the functions of the measurement and control system
1.3.1 硬件电路架构
系统硬件采取底层划分与功能复用的设计方式[14-15],现役系统板级总面积为402.85 cm2,新工控系统板级总面积为170.94 cm2,电路集成化程度相比提高2.36 倍。电路-物理层信息交互采用24 pin 接口复用,根据不同功能调整下位机软件,提高了工控系统兼容性。工控系统-上位机信息交互采用光纤通讯,避免了环境中电磁干扰对传输线的影响,可以进行长距离信息传输。工控系统的硬件电路架构如图7,可划分为电源模块、主控模块、A/D 模块、D/A 模块及数字I/O 模块。
硬件电路预留了8 路GPIO 通讯口,便于拓展外设。在I/O 模块、A/D 模块、D/A 模块中使用晶体管阵列、ESD 芯片组成保护电路。最后使用屏蔽机箱进一步减少外界的电磁干扰,保证了控制系统的稳定性与抗电磁干扰能力。
1.3.2 可视化系统
上位机软件在Qt、OpenCV 环境下编写,只有在相机正常、下位机正常、通讯连接正常情况下,软件监测控制功能才会开启,否则一致置“0”。
如图8 所示,可视化系统工作流程如下:1)相机初始化、软件初始化、监测连接状态;2)若连接正常,软件正常工作,反之锁死功能区进入保护状态;3)连接正常、工作稳定后控制相机物理层,包括电压、工作模式、扫描模式、触发模式、CCD 参数等;4)软件实时采集图像反馈到软件预览区。
整个界面功能区分为相机控制界面、图像预览及连接状态监测区、CCD 控制界面,保证了即时监控与控制的需求。图9 为上位机的可视化界面。
2 测试结果
图10 是所研制的高亮度增益超小型条纹相机实物,与现役的皮秒相机相比体积及质量均减少约60%,整机尺寸仅为450 mm×190 mm×240 mm,质量为10 kg。
采用条纹管静态测试系统(Streak Tube Static Test System,STR)对响应波长、阴极灵敏度、亮度增益、静态空间分辨率进行了测试。另外采用飞秒激光器、F-P 标准具、DG645 延时器、毛玻璃、反射镜、光阑片、示波器等搭建了条纹相机动态测试系统,对条纹相机的动态性能指标时间分辨率、动态空间分辨率等进行了测试。
2.1 阴极灵敏度
光电阴极是系统的光电转换器件,其性能直接影响系统探测灵敏度和精度。阴极灵敏度S是标准光源(色温为2 856 K)照射下,光电阴极规定面积产生的饱和光电流与照射到该面上的光通量之比,定义为
式中,IB为光源输出稳定时阴极电流值,ID为关闭光源时阴极暗电流值,Ø为光通量。
测试过程为:1)开启条纹管静态测试系统,在系统测试平台出光口处放置直径为Φ16 mm 的光阑片,将条纹管垂直放置于光阑片之上,调节条纹管位置使得光电阴极与Φ16 mm 光阑孔同心;2)连接条纹管栅极电极和高压电源输出端、条纹管阴极电极和PA 电流计红色探针、系统地线和PA 电流计黑色探针;3)开启高压电源,设置输出电压为200 V;4)设置光源照度为5 lx,此时阴极面处的光通量Ø为0.001 lm;5)待光源输出稳定后,读取PA 电流计读数,记录此值为测条纹管阴极电流值IB;6)关闭光源,待PA 电流计读数稳定后读取其读数,记录此值为阴极暗电流值ID,根据式(1)计算得出阴极灵敏度为268 μA/lm,如图11。
2.2 亮度增益
荧光屏输出合适亮度的图像将大大提升条纹变像管的分辨能力,亮度增益作为反映变像管的重要指标,定义为
式中,G为条纹变像管亮度增益,M为在2 856 K 标准色温光源的照射状态下条纹变像管荧光屏图像的法向亮度,E为光阴极面的入射照度。
测试过程为:1)开启条纹管静态测试系统,将条纹管垂直放置在测试平台上,调节条纹管使得光电阴极与光源同心;2)将条纹管电极与高压电源连接,设置输出电压值为-15 000 V、光源照度为10 mlx;3)待光源稳定后,读取系统内LP1 亮度计读数,记录此值为条纹管阳极输出值M,由式(2)计算出亮度增益为20.1,相比现役条纹相机,亮度增益提高10 倍以上,测试结果如图12。
2.3 光电阴极响应波长
响应波长是条纹变像管对单色入射辐射的探测能力,通过单色光辐照光电阴极,检测其是否产生光电流值。选取400~850 nm 光谱段得到的光谱响应曲线,如图13。
2.4 时间分辨率
时间分辨率是条纹相机的核心技术指标,由物理时间分辨率和技术时间分辨率组成,可表示为
式中,τp和τe分别代表物理时间分辨率和技术时间分辨率。物理时间分辨率由条纹管的电子光学系统决定,从1.1 节中CST 模拟计算中可知该值为24.1 ps。技术时间分辨率主要由扫描电路决定,其表达式为
式中,K为扫描电压斜率,P为条纹管偏转灵敏度,σ为条纹管在扫描方向的动态空间分辨率。因全屏时间为600 ps,扫描电压为600 V,则K=1.00 ×109kV/s。实验测得P=16 mm/kV,假设σ=20 lp/mm,计算得技术时间分辨率理论值τe=3 ps,可得理论极限时间分辨率τ=24.3 ps。
采用实验方法对所研制条纹相机实际时间分辨率进行了测试。采用脉冲半高全宽法标定时间分辨率,试验中采用飞秒激光(脉宽为290 fs,波长532 nm)作为标定光源,不计激光脉宽对时间分辨率的影响,飞秒激光经过F-P 标准具后产生的100 ps 等间隔脉冲进入条纹相机狭缝,经条纹相机转换成脉冲空间分布图像,读取最窄脉冲的时间坐标的半高全宽,计算得时间分辨率为36 ps,如图14。
由于条纹相机装配精度等原因导致实验测得的时间分辨率略高于理论值。
2.5 空间分辨率
利用分划板来测量相机的空间分辨率,分划板沿狭缝方向呈周期排列,每个周期包含8 组宽度不同、占空比为50%的亮暗条纹,对应的空间分辨率分别2、4、6、8、10、12、14、16 lp/mm,得到的静态空间扫描图像与X轴方向强度积分曲线如图15。计算得在分辨率条纹12 lp/mm 处对比度CTF=17.5%,在分辨率条纹16 lp/mm 处对比度CTF=16.9%,前端输入光学系统放大倍率为0.6,因此相机光电阴极处的静态空间分辨率高于26 lp/mm。采用30 ns 挡标定动态空间分辨率,图15(a)为分划板通过相机所成的图像,图16(b)为图16(a)框选部分沿X轴方向强度积分。计算得到分辨率条纹10 lp/mm 处对比度CTF=13.2%,因此相机光电阴极处的动态空间分辨率高于16 lp/mm。
经过各项标定实验,超小型条纹相机各性能指标满足各种场景下的应用需求,包括光谱响应频率200~850 nm、全屏扫描时间600 ps 等。关于超小型条纹相机的详细参数如表3。
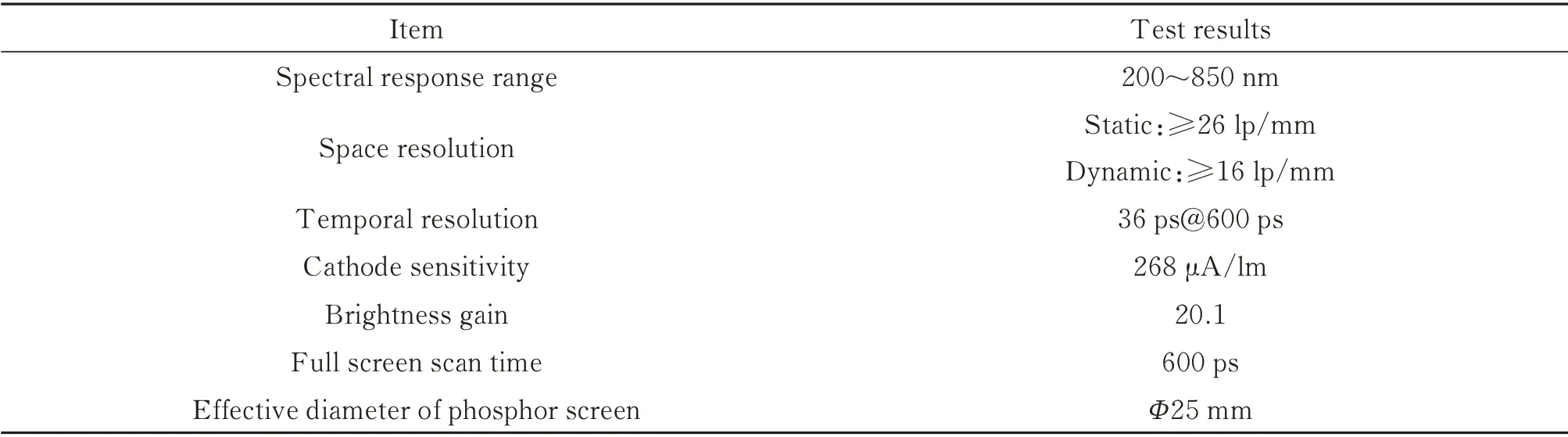
表3 相机标定实验数据Table 3 Camera calibration experimental dat
3 结论
本文针对激光雷达机载、星载应用场景,研制了一款高灵敏度、高亮度增益、高时间分辨率的超小型条纹相机,其体积与质量相比现役条纹相机减少66%以上。该相机的条纹变像管采用阴极半导体理论模拟研究、优化工艺的方式大幅度提高了阴极灵敏度与亮度增益,亮度增益为现役相机的10 倍以上。同时,针对该相机开发设计了一套高集成度新型控制系统,充分消除了之前版本集成度低、可靠性及兼容性差等缺陷,板级集成化程度提升了2.36 倍,并具有24 路复用接口、12 路扫描挡位等功能,实现了多设备兼容。测试结果表明,所研制小型化条纹相机的阴极积分灵敏度高达268 μA/lm,亮度增益为20.1,动态空间分辨率优于20 lp/mm,时间分辨率优于36 ps。相机实时通讯、控制、监测功能可靠有效,稳定性、抗干扰能力均有明显提升,在机载激光雷达等研究中有着广阔的应用前景。