涡旋压缩机逆向工程型线分析方法
2022-11-24张庆庆张重远彭学院
张庆庆,孙 民,张重远,彭学院
(1.西安交通大学 能源与动力工程学院,陕西 西安 710049;2.西安庆安制冷设备股份有限公司研究所,陕西 西安 710075)
1 引言
涡旋压缩机作为继活塞、转子之后的第三代压缩机形式,工作原理如图1所示,依靠动静涡旋盘的相互啮合形成月牙形封闭容积,随着曲轴的旋转,所形成的多个啮合点沿着渐开线由外向内连续移动,从而使工作腔容积周期性地变化,借以实现气体的吸入、压缩和排出过程。几个压缩腔同时平滑连续实现压缩,吸气过程和排气过程在整个旋转过程中持续不间断,这些工作特点使得涡旋压缩机具有高效节能、结构紧凑、微振低噪及工作可靠等优势,涡旋压缩机被广泛应用于暖通空调、冷冻冷藏、热泵、新能源汽车等领域[1]。

图1 涡旋压缩机工作过程示意图
动静涡旋盘的涡旋型线作为涡旋压缩机的关键技术,国内外学者对此作了大量研究,主要关注线型的几何理论和型线修正优化设计[2,3]。在工程应用中,经常需要对涡旋压缩机进行逆向工程分析及研究,即对某一涡旋压缩机产品,运用逆向技术反求出涡旋型线的关键参数并建模重构,作为结构及性能理论分析的基础,探索、创造出拥有自主知识产权的开发技术和新产品,具有重要的理论意义和实用价值[4]。王立存等人基于插值函数,引入矩阵,利用微分几何理论求解了涡旋型线通用曲线各个系数的值,但得到的是涡旋型线的共轭泛函型线形式,产品设计应用中,需进一步转化为基圆表达式[4,5]。苏国胜等人提出一种基于三坐标测量渐开线基圆半径反求的方法,根据渐开线参数方程构造牛顿迭代格式求解出基圆半径,但需要在测量数据精确确定基础上进行[6]。汤洁等人基于最小二乘法求解模型,三点定圆并由高斯牛顿方法进行初值优化,获得基圆位置和半径,但误差仍较大为2.9%[7]。兰州理工大学邬再新、吴军等人应用逆向工程建立了变截面涡旋盘快速精度诊断方法,验证了变截面涡旋盘的加工精度和形位公差符合要求[8,9]。郝胜利提出了一种基于CAD绘图软件的涡旋压缩机型线方程反求方法,但求解涡旋型线平移坐标和旋转角度数值时需要根据实际加工经验假设小数位数,通用性受限[10]。
本文基于逆向工程技术提出了的一套涡旋压缩机定基圆渐开线型线参数测绘方法,利用3D扫描技术和专业曲线拟合软件,求解获得了精确的基圆渐开线方程,基圆半径误差在1e-4mm级别,求解精度高,通用性强,此套方法也可拓展应用到其他涡旋型线测绘工作上。
2 型线理论
基圆渐开线因为内容积比高、动态性能稳定,且加工方便被广泛采用[11]。如图2所示,图中黑色曲线为标准圆渐开线,基圆半径为a,方程表达式为(1)
(1)
图2中浅蓝色曲线为旋转一定角度α后的圆渐开线,角度α称为渐开线的起始角度,方式表达式为(2)

(2)
图2中深蓝色曲线为浅蓝色曲线进一步平移(x0,y0)距离后的圆渐开线,方式表达式为(3)
(3)
令t=θ+α,表达式(3)可转变为表达式(4)
(4)
对于工程实际应用中遇到的涡旋型线,可以测绘出涡旋盘上的各点,但无法直接测绘出圆渐开线基圆的坐标、半径或者起始角度,即表达式(4)中的参数a、α、x0、y0是未知待求量,参数t是表达式的自变量。

图2 基圆渐开线型线坐标变化示意图
3 逆向工程型线分析方法
3.1 逆向工程3D扫描技术
涡旋压缩机结构复杂,用传统的检具测绘难度较大,且涡圏曲面测绘精度要求高,逆向工程3D扫描技术,显著提高曲面零件的测绘精度和测绘效率,是先进的可视化、数字化测绘技术。本文对某台涡旋空气压缩机进行了3D扫描测绘,获得了精确的动静盘三维模型,如图3所示,测绘精度为1e-5m级别,虽然3D扫描技术可以精确地计算出被测工件的几何尺寸和位置,但动静盘涡旋曲线是基于大量的点建立的,基圆坐标、半径和型线起始角度等关键尺寸参数都无法通过直接测绘得到,建模软件也无法自动识别计算出涡圈型线,需要进一步分析求解。
3.2 型线拟合技术
通过SolidWorks三维建模软件打开3D扫描后的动静盘模型,应用插入→特征→移动/复制命令,调整三维模型位置,使得涡旋齿顶平面与前视基础面重合,则齿顶涡旋型线在XY平面内,点击涡旋盘齿顶曲线,可获得型线上不同点的XY平面坐标值。根据型线理论知识运用专业软件进行曲线函数拟合,通过采用通用全局优化算法,无需给定参数初始值,就可以计算出最优解。参考表达式(4)设定带求解通用渐开线方程为表达式(5),其中t为自变量,待求渐开线方程式参数是R(基圆半径)、B(渐开线初始角度,弧度值)、x0、y0。
(5)
变化得到表达式(6)和表达式(7)
(6)

图3 动静盘3D扫描的三维模型
(7)
基于最小二乘法设定目标函数,选取拟合数据点数量为N,N暂时选取值为40,表达式为(8)


(8)
采用麦夸特法(Levenberg-Marquardt)和通用全局优化方法相结合的优化算法,具体求解代码如下所示,其中MinFunction后表达式是目标函数。
{
1.6 按蚊50%吸血时间测定 在23℃吸血条件下,绘制饥饿按蚊叮吸小鼠0、5、10、15 min后的吸血曲线,并用回归分析公式计算按蚊完成50%吸血率所需的吸血时间。
ConstStr=B+Sqrt(1/R^2*((X[i]-X0)^2+(Y[i]-Y0)^2)-1);
Parameter R,B[-pi,pi],X0,Y0,N=40;
DataSet;
X,Y=
15.5901 86.2142
……
EndDataSet;
Sum(i=1:N)((-X[i]+R*(COS(t)+(t-B)*SIN(t))+X0)^2)+
Sum(i=1:N)((-Y[i]+R*(SIN(t)+(t-B)*COS(t))+Y0)^2);}
曲线函数拟合的拟合精度与选取拟合数据点的数量和位置有一定关系,通常情况下拟合数据点越多,拟合精度越高,3D扫描的精度在0.01 mm级别。同时也与所选取的数据点位置误差有关系,可通过目标函数值/数据点数量,即MinFunction/N这个数值进行判断,若太大,则说明数据点中有个别数据点误差较大。
以静盘外圈型线拟合为例,使用本文介绍的逆向工程型线分析方法,获得了不同数据点数量下的拟合结果,如表1所示,长度单位统一为mm。由表可看出,3D扫描获得的模型数据点精度高,所以MinFunction/N数值都比较低,为0.01 mm级别,满足工程应用需求。数据点数量N选取40的情况下,可以获得很高精度的拟合结果,基圆半径的误差为1.4e-4mm。静盘基圆半径及位移坐标值最终结果需要综合考虑内外圈的结果,因为内外圈型线的基圆是重合的,即基圆半径的位置坐标是一样的。最终静盘外圈型线函数拟合结果为(a=R=2.77、α=B=-0.72、x0=-0.023、y0=0.039),静盘内圈为(a=2.77、α=0.72、x0=-0.023、y0=0.039)。获得基圆圆心坐标位置后,可以在三维模型软件中通过插入→特征→移动/复制命令,移动静盘模型使得基圆圆心与坐标原点重合。

表1 静盘外圈型线拟合结果
3.3 渐开线公式标准化
根据本文逆向工程型线分析方法获得的动盘内圈型线函数拟合结果为(a=2.77、α=-0.843),动盘外圈为(a=2.77、α=-2.283)。根据获得结果在SolidWorks建模软件草图中绘制圆渐开线,采用曲线→方程式驱动的曲线→参数性,得到如图4中虚线部分所示曲线,在标准的涡旋型线中,内外圈型线渐开线起始角度互为相反数,即图中∠NOM角平分线OA应与X轴重合,为此把动盘型线整体逆向旋转∠XOA角度,旋转1.563rad,最终动盘内圈型线函数拟合结果为(a=2.77、α=0.72),动盘外圈为(a=2.77、α=-0.72),此结果与静盘型线结果一致,即为标准化的动静盘渐开线公式。

图4 动盘内外圈渐开线示意图
4 型线始端修正
在涡旋盘的设计及工程实际应用中,为了保证型线加工工艺和压缩机性能,通常对涡旋起始段进行型线修正,常见的修正方法有双圆弧修正、多圆弧修正、圆弧加直线修正、三角函数修正及二次曲线修正等。本文涉及的涡旋空气压缩机涡旋型线始端采用的是多圆弧修正,如图5所示,动盘始端采用的是三圆弧修正,三圆弧的圆心位置和半径通过作切线试画圆弧确定,最终结果如图5所示。内外圈渐开线修正后的起始点角度通过把坐标值带入公式(6)中求解获得,此方法可以求解任意渐开线上的弧度值。
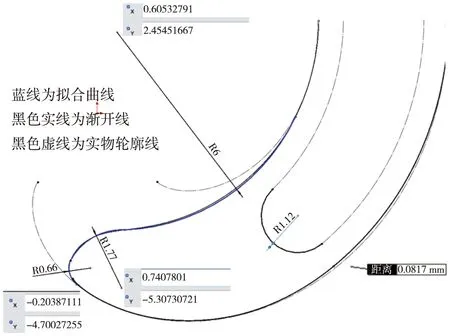
图5 动盘始端修正
根据本文介绍的涡旋压缩机型线分析方法获得的最终结果,绘制得到了动静盘型线,如图6所示,获得的标准化的动静盘渐开线公式为涡旋压缩机的性能研究打下基础,例如在进行流场仿真工作中对网格进行精确划分等,本文工作有利于消化吸收既有先进技术,探索、创造出拥有自主知识产权的新的开发技术和新产品。

图6 动静盘型线绘制
5 结论
基于涡旋压缩机逆向工程需求,本文提出了一套涡旋基圆渐开线测绘方法,通过3D扫描技术或其他先进测量工具获得型线上不同点的XY平面坐标值,然后利用专业曲线拟合软件求解获得了精确的基圆渐开线函数参数值,主要包括基圆半径、基圆圆心坐标和渐开线初始角度,并对动静盘内外圈涡旋型线公式进行标准化。此方法通用性强、精度高,基圆半径误差在1e-4mm级别,满足工程应用需求,为涡旋压缩机的性能研究打下基础,有利于优化并开发新产品,本文逆向工程型线分析方法具有重要的理论意义和实用价值,并且可以拓展应用到其他涡旋型线测绘工作上。
