姿控发动机试验环境温度精确控制*
2022-11-24张媛媛
张媛媛,陈 琳
(1.上海空间推进研究所,上海 201112;2.上海空间发动机工程技术研究中心,上海 201112)
0 引言
单组元姿控发动机具有较高比冲,安全性能好,系统结构简单,可靠性高等优点,广泛用于姿控动力系统和卫星推进分系统.变推力无水肼发动机因其成本和效率的优势,成为深空探测系统的首选[1].无水肼冰点较高(1.4 ℃),其使用受到了限制,其能否在更广的范围用作液态推进剂与能否加入适当的冰点降低剂使其冰点降低而不影响其性能有关.已被证明成功的冰点降低剂有:水、氨、硼氢化锂、氰化氢、硫氰酸铵和硝酸肼.以DT-3为推进剂的单组元发动机具有冰点低、研制成本低、系统热控要求低、可靠性高的优点,广泛应用于航天运载火箭的姿态控制动力系统[2].在动力系统中使用DT-3的优点在于它可以省去或简化加热保温装置,减少结构重量,增加有效载荷,提高系统的可靠性.
针对单组元姿控发动机低温工作爆式分解,研究表明低温是影响发动机低温性能的主要影响因素[3],存在导致发动机失效的风险,有必要进行推进剂(含催化剂)低温下性能验证试验,试验的目的主要是考察DT-3推进剂低温启动能力和催化剂低温下的催化分解能力,并进行可靠性摸底.随着工作温度的降低,DT-3的密度和黏度增加,对发动机的性能影响很大[4-5].因此,对试验的环境温度控制要求很高.
发动机头部结构复杂,且有许多传感器,令其在低温状态进行点火有一定的难度.文献[6]介绍用氯化钙+干冰对推力室头部进行降温,试验温度为-20 ℃,未知实际效果如何.但由于氯化钙水溶液的冰点随浓度变化,且有腐蚀性,使用中有诸多不便.
液氮热沉广泛用于模拟空间冷黑环境[7],但液氮热沉用于普冷(如-30 ℃)时,温差高达160 °,主要呈现以下特点:特别容易引起温度过冲;热沉主要依靠辐射传热,传热热阻大,滞后也很大;温度低,易汽化,输送、控制困难[8],变工况下流量的精确控制几乎不可能.
对于诸如液氮热沉这样的大滞后、时变、有死区系统的温度控制,一般总是通过复杂的系统设计,控制液氮的相变以改善其时变.滞后系统的传统控制方法无非是改进的PID算法[9]和加上神经网络的先进PID控制方法[10].有研究认为内模控制方法优于PID算法[11],也有人用Smith预估器对纯滞后系统进行控制[12].但对于时变的大滞后系统,单一的控制算法难以取得满意的效果.文献[13]提出了专家PID与前馈Smith控制相结合的控制算法实现大滞后非线性反应釜的温度控制,但没有涉及时变问题.对于死区的处理,通常采用在系统中增加或减少某个固定的电压值进行补偿[14].这种方法需要精确的模型[15],或者需要复杂的自适应算法在线识别死区[16].
所有预测控制的原理可归结为模型预测,滚动优化, 反馈校正[17].其中,动态矩阵控制(dynamic matrix control,DMC)被认为是工业过程控制领域内最有吸引力的控制方法之一.DMC不需要复杂的系统辨识和建模,采用反馈校正基础上的在线滚动优化,对模型失配有较强的鲁棒性.简单的大滞后系统,诸如电阻炉温度控制,预测控制就能起到很好的效果[18].针对某些大滞后加热过程中对某一时段内温度保持某一恒值的控制要求, 李少远等[19]根据热力学能量关系原理提出了对开机最优预热时间和关闭最优时间的预测控制方法.对大滞后非线性系统的控制,文献[20]提出了一种PID型多步预测控制,并进行了仿真分析.
本文通过控制阀门等最小开启度改善死区和模型对不确定性,采用辅助PID加热补偿控制对DMC算法进行改进,实现大滞后、时变、模型不确定的液氮热沉的温度精确控制,从而满足了某姿控发动机试验高精度环境温度控制的需求.

1-液氮盘管; 2-测力(安装)支架;3-测力(安装)平台;
1 系统组成
液氮热沉由液氮盘管和红外加热器等组成.其中,液氮用于用DMC算法进行降温控制,红外加热器用于PID补偿控制.
液氮热沉温控系统的组成框图如图2所示.温度传感器、采集器、PC、PLC和执行机构构成了一闭环数字控制系统.SSR1控制加热器的通断,SSR2控制低温气动阀的开关.
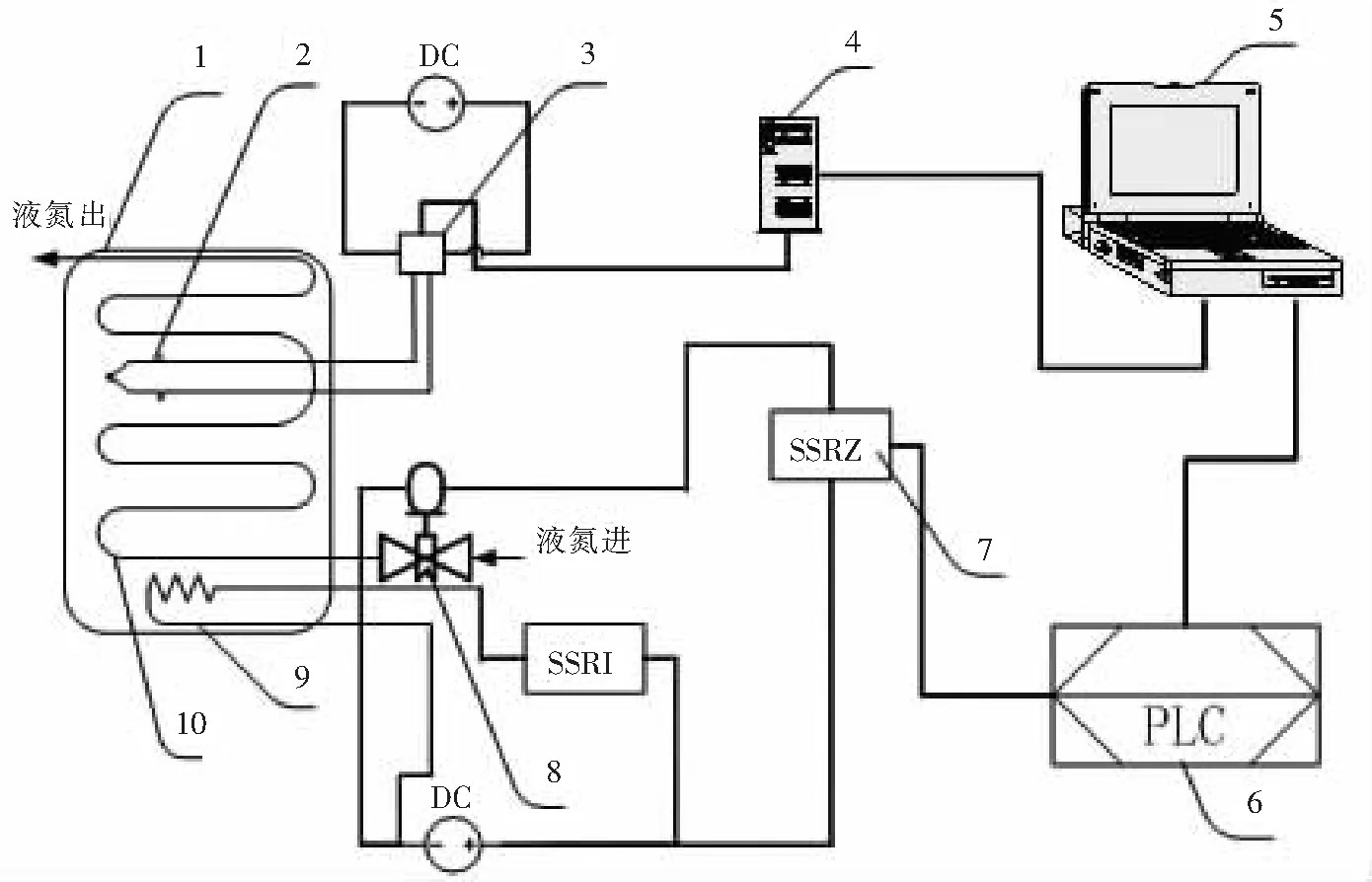
1―液氮热沉;2―温度传感器;3―变送器;4―采集器;5―PC;6―PLC;
采集器实时采集热沉温度.计算机根据采集结果,与给定值比较,采用改进的DMC算法,通过PLC进行PWM控制.PLC依据DMC算法的计算结果,实时控制SSR固态继电器的通断,使实际热沉温度跟踪给定值.
2 改进的DMC算法
2.1 预测模型
液氮热沉的温度控制系统,可近似地用下述一阶惯性加纯滞后的环节表示
⑴
式中:K为过程增益;τ0为纯滞后;T0是惯性环节的时间常数.对于电加热系统,可忽略其滞后.
为了简化起见,将时间标度改变为t′=t/T0,输入量改为y′=y/K,此时得规范化的传递函数
(2)
式中,τ=τ0/T0.
取采样周期为T,τ为T的整数倍,即τ=lT,规范化对象在前接一零阶保持器后,其Z传递函数为
(3)
式中,σ=exp(-T).相应的阶跃响应系数为
(4)
(5)
此时未来各时刻的输出预测值为
(6)
此预测模型写成向量形式为
(7)
式中:
式中:M、P分别为控制时域和优化时域;A是有阶跃响应系数组成的P×M动态矩阵.
2.2 预测模型
对于DMC控制,其优化准则为
(8)
式中
ωp(k)=[ω(k+1),…,ω(k+P)]T,
Q=diag(q1,…,qP),
R=diag(r1,…,rM),
由权系数构成的对角阵Q、R分别为误差权矩阵和控制权矩阵.对于有纯滞后l的系统,误差权矩阵有如下形式
(9)
为简化计算,先不考虑约束,通过极值必要性条件dJ(k)/d△u1M(k)=0求得
(10)
加入约束条件
u1≥umin,
式中,umin为阀门的最小开度.
DMC只取其中的即时控制增量△u1(k)构成实际控制u1(k)=u1(k-1)+△u1(k).
2.3 反馈校正
反馈校正分为两部分.一是DMC的反馈校正,二是PID的补偿校正.
在每一采样时刻,首先检测对象的实际输出与给定值的偏差e(k).
如果e(k)≥0,采用DMC反馈校正,检测对象的实际输出y(k+1),并与模型预测输出相比较,构成输出误差
(11)
采用对e(k+1)加权的方式修正对未来输出的预测
(12)
校正后的预测值通过移位作为k+1时刻的预测初值
(13)

(14)
式中:K为比例系数;T为采样周期;Ti为积分时间;Td为微分时间.
3 仿真校验
对上述算法进行仿真校验.采样时间T取2 s,滞后时间τ取20 s,为了保证在不同的滞后时间程序有通用性,P=l+5,M=1,R=0,Q的选择前面已介绍.
仿真的结果如图3所示.
从图3中可以看出,尽管DMC控制算法最终还是能够对大滞后环节进行了比较好的跟踪,但其响应时间较长.考虑到大多数温度控制系统对温度控制精度都可以适当放宽,因此采用允许过冲来增加快速性的方法来对大滞后环节进行控制.最小控制量就是给控制量规定一数值,当控制量小于该给定值时,强制让系统按最小控制量执行.这样一方面可以增加系统的快速性,另一个很重要的方面就是前面所介绍的液氮热沉系统有很大的时变性,让系统处于相对稳定的工作状态,便于实际过程的控制.
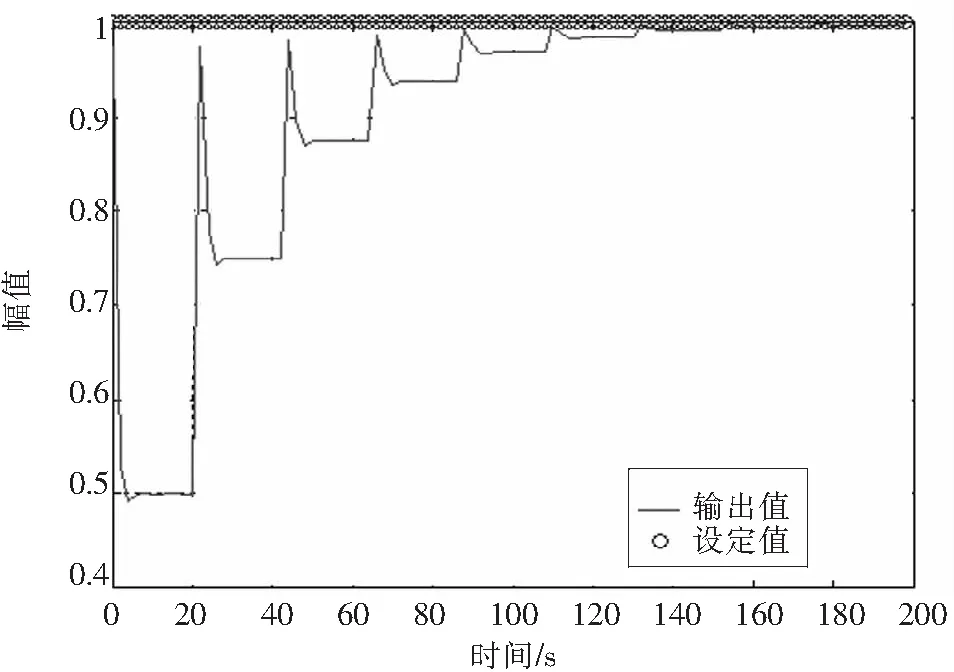
图3 DMC算法对大滞后环节的控制效果
有最小控制量设置的DMC仿真结果见图4,5,6.图中lo代表阀门的最小开度.
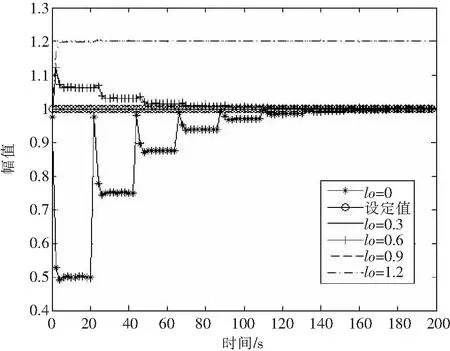
图4 不同的阀门最小开度对控制效果的仿真(τ=20)

图5 不同的阀门最小开度对控制效果的仿真(τ=40)
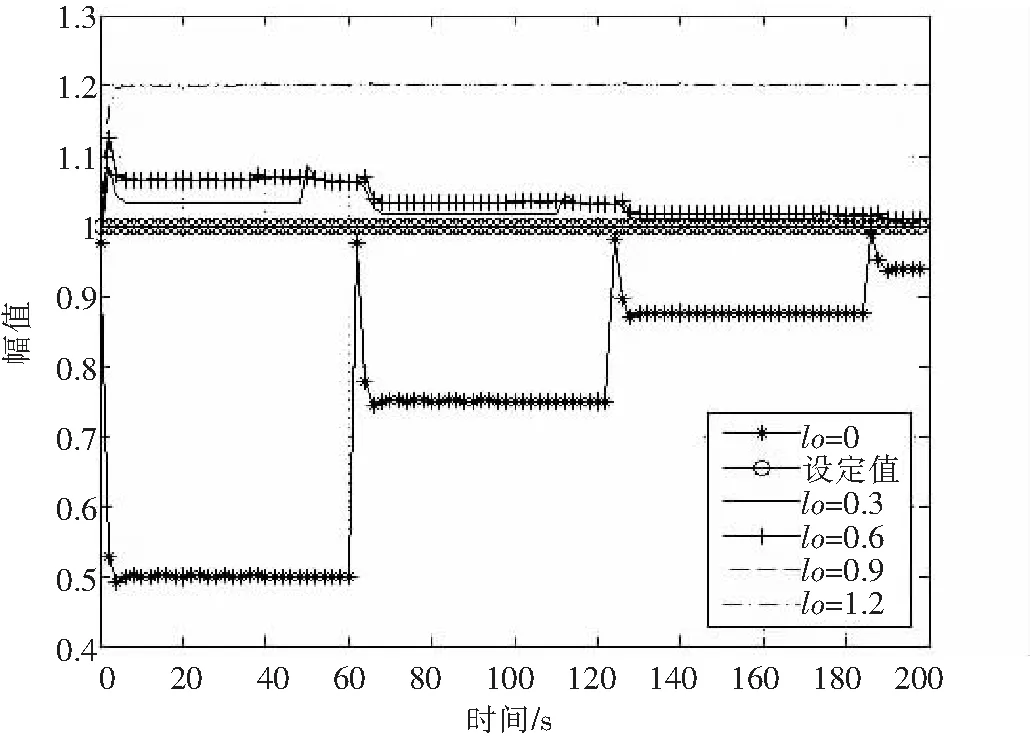
图6 不同的阀门最小开度对控制效果的仿真(τ=60)
从图中可以看出阀门最小开度的限制极大地增加了响应的快速性,当lo在0.3到0.9之间时,控制效果改进十分明显.当最小开度达到1以上时,系统变得失控.给大滞后温控系统增加最小控制量给系统带来的负面影响是有明显的过冲.PID补偿算法正是用来消除这些过冲.
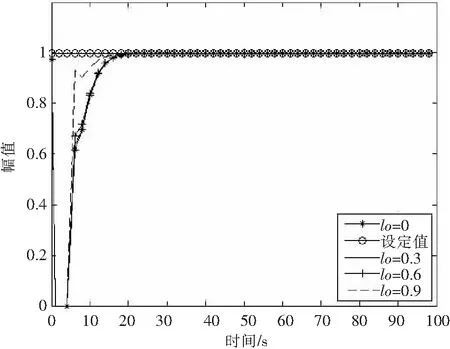
图7 具有PID补偿控制的DMC控制效果(τ=20)
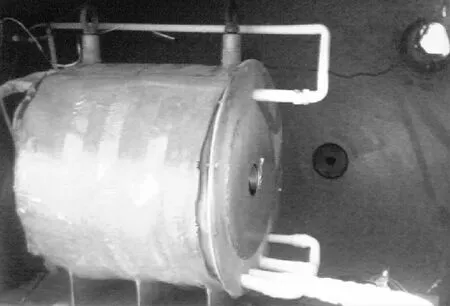
图8 低温热沉在真空舱
系统的电加热系统,其滞后一般可忽略.在PID补偿的DMC预测控制过程中,在每一个采样时刻,比较系统输出值和给定值的偏差,决定系统采用DMC控制还是采用PID补偿控制.图7的仿真表明,补偿PID控制的电加热系统可明显改善系统的控制性能.
4 试验验证
小热沉的好处是可以把传感器放在热沉的外面,避免低温环境的影响.某型号发动机低温性能验收试验需要在-30 ℃,200 Pa以下的条件下进行.此时,也可以将低温热沉放进真空舱.最小开启度通过在液氮管路并联一放气支路实现,DMC算法控制低温气动阀.
热沉温度控制试验持续了3 h,实际控温效果如图9、图10所示.
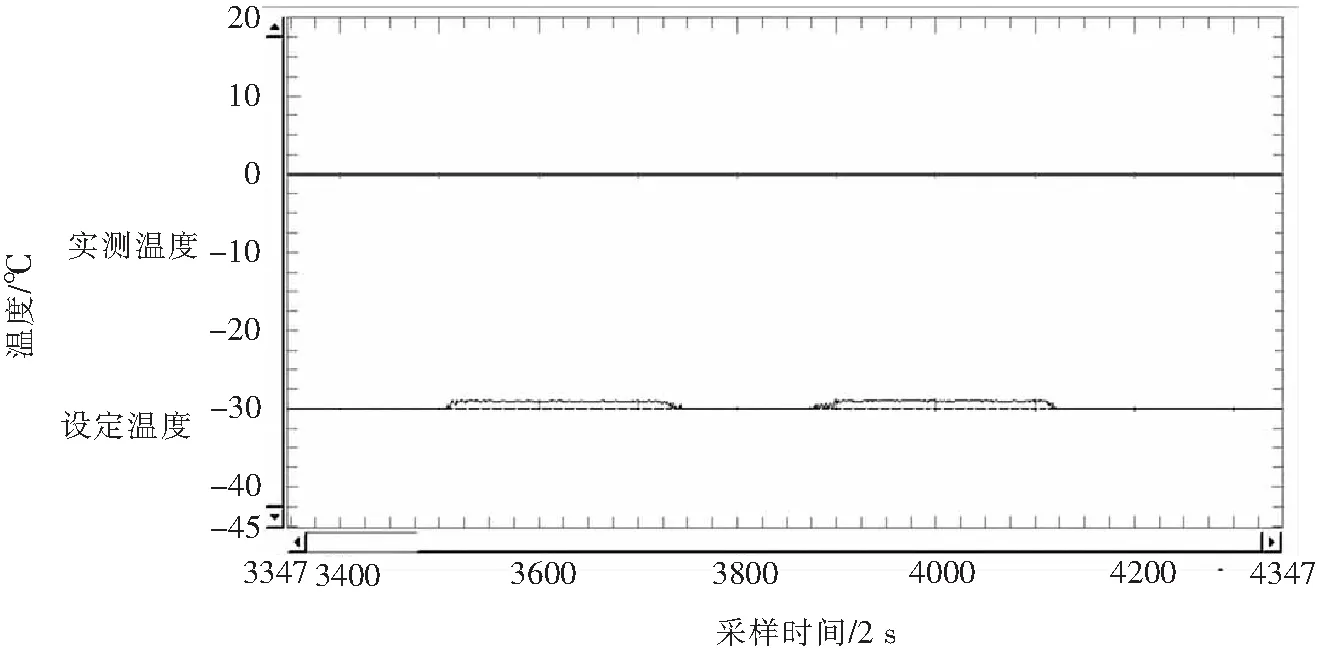
图9 改进DMC控制器的热沉低温控温曲线
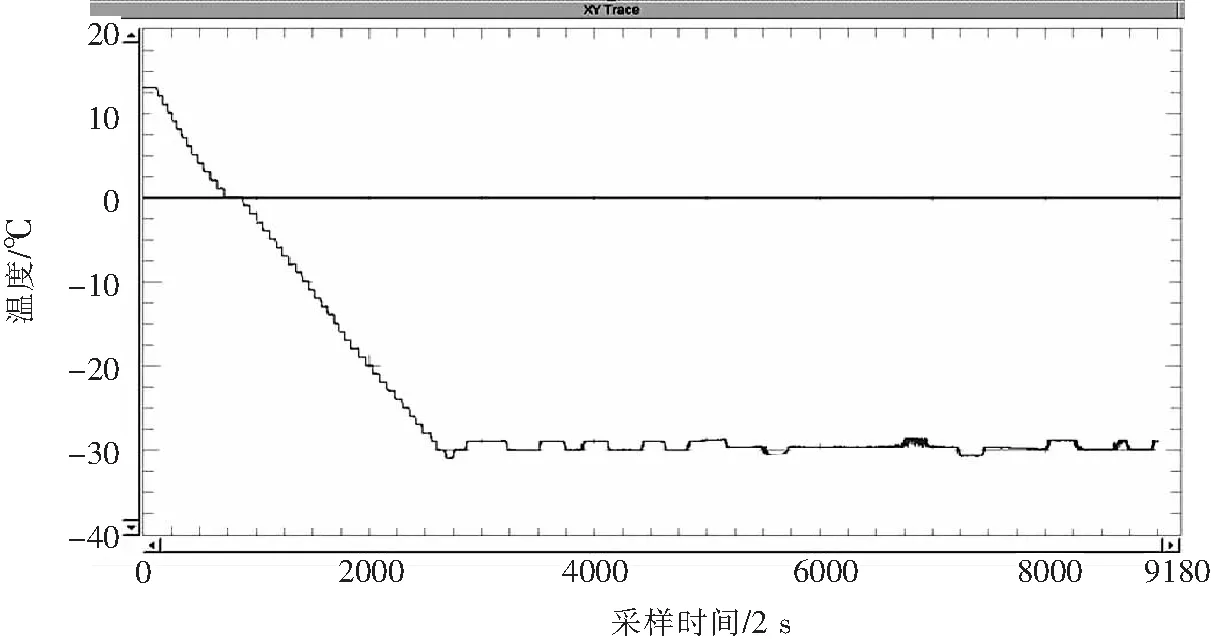
图10 改进DMC控制器降温、控温全程曲线
从图9可以看出,热沉温度过冲明显减少,温度虽有波动,但误差不超过1 ℃.图10全程降温、控温曲线表明,从13 ℃降到-30 ℃只需要约2 h,而温度可以一直保持稳定.实际控温进行了5 h,仅有3次温度不超过1 ℃的过冲.
实际控温的波形有些许台阶状.其主要原因是铠装铂电阻温度传感器响应时间较长,对温度变化的响应有些滞后,如采用薄膜热电偶作为测温器件,有望取得更好的控温效果.
温度达到要求后,进行了发动机点火试验,试验曲线如图11所示.
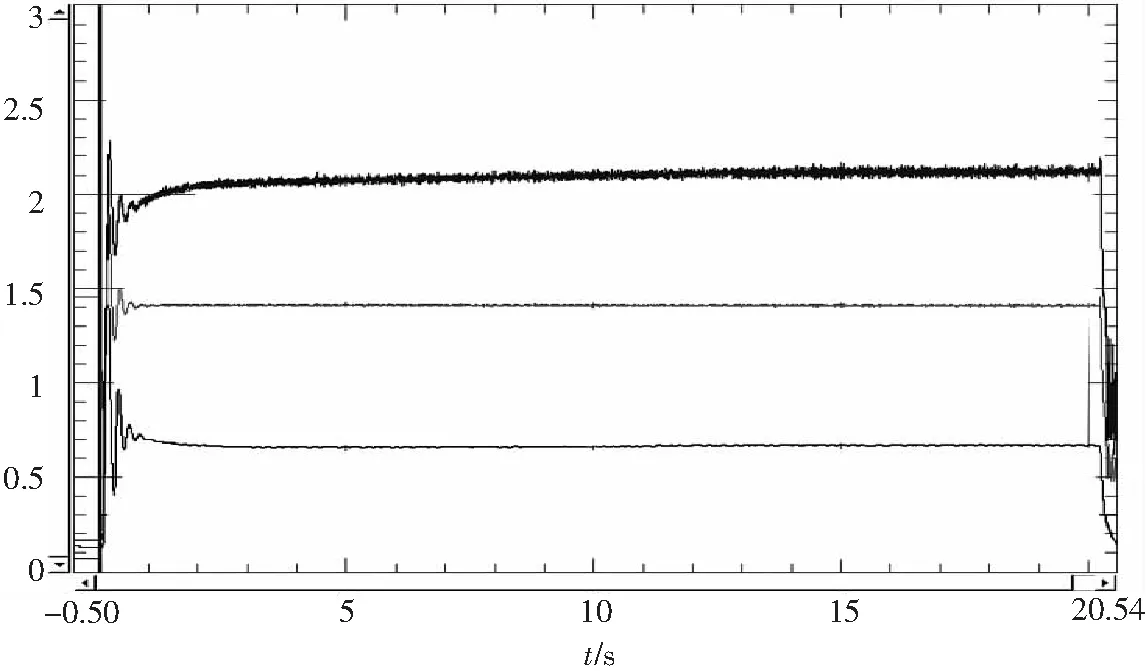
图11 发动机低温点火及数据曲线
5 结论
在大滞后、模型不确定,甚至时变的情况下,如液氮热沉的温度控制,最小开度控制能够大大增加系统的响应特性,避免死区,保证系统的模型相对稳定;PID补偿控制能够有效解决大滞后系统控制的过冲问题;在模型相对稳定的情况下,改进DMC算法有效地加快了系统的动态响应并极大地改善了系统的控制性能,有效地解决了滞后和过冲的问题,从而满足姿控发动机试验高精度环境温度控制的需求.