基于分数阶阻抗的机器人动态接触控制仿真
2022-11-19曹宏利
曹宏利
(太原理工大学 机械与运载工程学院,太原 030024)
随着机器人技术高速发展,其作业约束正在突破传统物理围栏,逐渐融入多样化的人类社会以及外界物理环境,如人机合作精密装配、机器人辅助精密加工、医疗康复机器人机械臂[1]等都是目前较为活跃的应用领域。因此,如何控制机器人与物理环境之间的动态接触过程问题显得愈发重要[2]。机器人与环境之间动态接触过程产生的接触力常用阈值进行限制[3],若非如此,可能会在接触产生的瞬间形成过大接触力,直接导致任务失败,造成严重的生产事故。这种接触超调现象可能是由于测量反馈或通信延迟,机器人建模误差或环境动态变化,不连续控制输入等多种因素复合所造成的[4]。为了解决这一棘手难题,国内外研究者相继提出了多种柔顺控制方法。
目前机器人常用的柔顺控制方法以混合位置力控和阻抗控制为主。MASON[5]提出了将机器人自由度和几何任务分解的混合位置力控制,该方法将任务空间划分为位置和力两个独立的子空间,在无约束的位置空间采用位置跟踪控制,在力约束空间采用力闭环反馈控制。HOGAN[6]定义了运动与力之间的相互关系,即阻抗控制。在多数与机器人相关的动态接触任务中,阻抗控制相比混合位置力控有更好的鲁棒性能[7]。然而,混合位置力控直观且简洁的理念,常与阻抗控制结合用于处理更加复杂的动态接触任务,如在不确定环境下机械臂装配过程中从无约束到约束空间的平稳过度控制[8],患者上肢外骨骼屈伸康复[9-10],机器人力控打磨应用[11-12]等。
为解决大多数工业机器人只开放位置控制模式而无法直接使用阻抗控制的问题,一些学者提出了基于位置的阻抗控制方案[13]。甘亚辉等[14]针对机械臂的打磨作业,根据力偏差计算出期望位置轨迹实现机器人接触力控制。针对基于位置阻抗中动态更新速率调节问题,CAO et al[15]设计出一种实用简便的调节方法。SHENG et al[16]针对机器人在加工大型薄壁零件中由接触力超调损坏零件问题,设计了通过模糊控制率调整动态更新速率的阻抗控制。
与此同时,一些研究人员还将目光转向了另一种非线性控制,即分数阶阻抗控制,其相比整数阶阻抗具有更加稳定的效果[17]。由于分数阶阻抗的固有记忆特性,能够改善瞬态响应和稳态跟踪从而提高闭环系统性能[18],如在提高人机物理交互的稳定性[19]和外骨骼穿戴机器人的柔顺性[20]方面都有着显著效果。但分数阶阻抗的阶次计算十分复杂,如何实时计算和在实际应用中布置成为问题,OUSTALOUP et al[21]提出了一种利用频率响应拟合分数阶模型得到近似后的整数阶传递函数,目前较为常用。即便如此,计算度仍然复杂,需要在实用性和复杂度之间找到合理的平衡点。不仅如此,分数阶阻抗与整数阶阻抗之间模型和性能差异研究较少,以及分数阶阻抗在机器人与环境动态接触过程中的作用效果和实施策略需要研究。
针对机器人与环境动态接触过程产生的接触超调、响应速度和跟踪精度等问题,通过设计分数阶阻抗改善接触行为,提升接触过程中的稳定性。首先,通过分析当前整数阶阻抗对接触过程控制特性,设计出分数阶阻抗控制。根据分数阶阻抗的固有属性设计百分比增益系数将分数阶阻抗映射为整数阶阻抗便于计算和实际应用,并将提升整数阶的一些特性引入到分数阶阻抗进一步提升性能。最后,开展了多种机器人在动态环境下的接触性能仿真对比研究,验证本文所提出的分数阶阻抗控制的有效性。
1 经典阻抗控制
基于位置的阻抗控制是将机器人的位置跟踪与阻抗策略分层,测量接触信息,通过阻抗控制计算位置偏差来调整期望轨迹,由机器人运动控制区进行运动跟踪进而实现柔顺接触的方法[22],如图1所示。

图1 机器人与环境交互简化模型
阻抗函数常选择型如G(s)=1/(mds2+bds+kd)的线性二阶模型,其稳态时接触力跟踪误差如下[16]:
(1)
从式(1)可知,阻抗控制若要减小稳态跟踪误差,一是精确反馈测量环境的位置和刚度以此设计阻抗参数,然而实际中这是十分困难的。二是去掉阻抗模型的弹性项,并增加对动态环境进行补偿,形成自适应阻抗控制如下[12]:
G(s)=1/(mds2+bd(s+ρ(s)).
(2)
自适应阻抗控制由于去掉弹性项,让机器人与环境接触瞬间产生能量无法缓慢释放,因此会导致一定的超调现象。进一步,自适应阻抗控制的补偿项,取较大的更新速率虽能提高稳态跟踪精度,但会使系统在接触瞬间呈现振荡超调行为[16]。因此需要对更新速率进行动态调节,能够同时兼顾瞬态和稳态行为的动态自适应阻抗控制被提了出来[15-16]。
因此,在机器人与环境动态接触过程中,经典阻抗实施策略可总结如下:在碰撞或接触初始阶段,可增大阻抗的弹性项或减小更新速率来抑制超调或不稳定行为;在稳态跟踪或工作阶段,去掉弹性项或增大更新速率来提高跟踪精度。
2 基于分数阶的阻抗控制
2.1 自适应分数阶阻抗控制
由整数阶自适应阻抗控制设计思路启发,分数阶阻抗中的二阶微分因子由整数变成分数[19],如下:
(3)
因此,分数阶阻抗相比整数阶阻抗多引入了阶次参数α(1<α<2),能够调整机器人与环境之间的动态交互行为,使控制策略设计更加灵活。当阶次取下极值,变成一阶阻尼控制,取上极值时,变成了二阶整数阶阻抗控制。由此表现的固有自然属性是随着阶次减小,惯性储能特性逐渐衰减,而能量耗散特性将占据主导地位,变换到频域表达如下:
(4)
由式(4)可知,分数阶阻抗的有效质量和有效阻尼分别为mdωαsin(απ/2)和mdωαcos(απ/2)+bd(jω+ρ(jω)),而一般整数阶阻抗为md和bd,是固定常数。因此,分数阶的有效阻尼和质量与频率相关,这一特性对动态接触过程控制具有重要意义,减小分数阶阻抗的阶次,可以显著提高机器人与环境接触的稳定性和鲁棒性。
2.2 分数阶阻抗近似计算
常用的间接逼近算法有连分式、Chareff、Oustaloup等,其中Oustaloup具有良好的近似效果[15],但仅适用于特定情况,且计算分数阶微积分仍旧复杂。
从分数阶阻抗的固有自然属性可知,有效质量和阻尼由阶次决定。由此,本文用百分比系数β=α-1(0<β<1)连接在取极限值下的两个整数阶控制器实现近似,由占空比进行调节,如下:
(5)
由式(5)可知,系数β决定了分数阶阻抗近似后的有效质量和阻尼,与阶次α具有同样调节作用。
2.3 响应速度
在阻抗方程前引入前置PID,通过调整PID参数可以同时改变阻抗方程的惯性和阻尼参数,从而改善阻抗控制的响应速度[23]。如图2所示,当PID参数选择使期望阻抗参数增大时,系统响应加快。
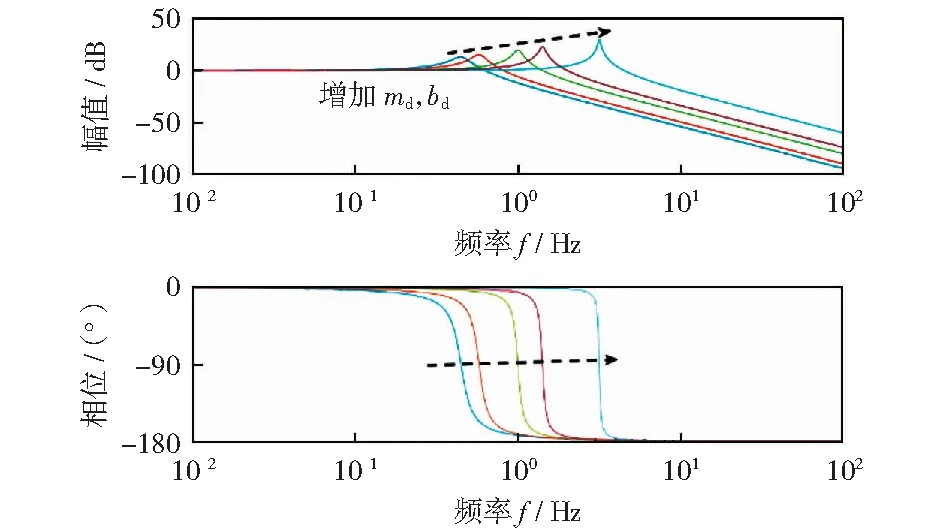
图2 阻抗惯性和阻尼参数Bode分析
2.4 自适应边界
分数阶阻抗控制的稳定性和响应速度不仅与近似系数β、PID参数有关,还与补偿率ρ有关。经由上述小节2.2分数阶阻抗近似和小节2.3添加前置PID,自适应分数阶阻抗在时域完整表达如下:
(6)

(7)

(8)
设置弹性接触环境fe=-kee,并将其微分形式代入(8)可得:
(9)
(10)

(11)
对式(11)拉式变换得:

(12)

(1-β)mdTs3+bdTs2+keT(γβ(1-β)-σ)s+σke=0 .
(13)
由式(13)计算劳斯向量如下:

(14)
为保证系统稳定,系数必须为正,更新速率的边界计算如下:
(15)
3 仿真实验
为了验证本文所提出的分数阶阻抗在机器人动态接触过程控制的有效性,本节设计了一系列机器人接触的仿真试验。
3.1 1-DOF机器人接触仿真

采用固定步长求解器进行仿真计算,设定采样周期T=4 ms(当前一般机器人的力控制周期),输入阶跃函数形式的期望力,数值为Fd=30 N.机器人位置PD控制的参数设置为较高的正增益kp=1e6,kd=1 400.设置刚度环境为ke=4 000+800sin(π/2t).
图3(b)展示了经典柔顺控制方法(整数阶阻抗控制[6](integral order impedance control,IO-IC)、自适应整数阶阻抗控制[12](integral order adaptive impedance control,IO-AIC))、基于模糊动态更新速率的自适应整数阶阻抗控制[16](fuzzy integral order adaptive impedance control,Fuzzy-IO-AIC)、分数阶阻抗控制[19](fractional order impedance control,FO-IC)、自适应分数阶阻抗控制[20](fractional order adaptive impedance control,FO-AIC)和本文Fuzzy-FO-AIC在同等阻抗参数基准下的接触阶段性能对比。
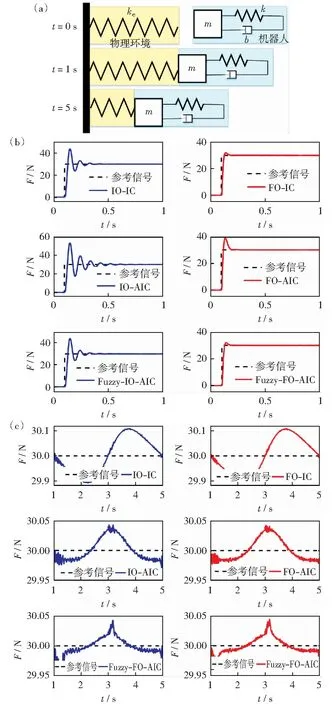
图3 经典阻抗与分数阶阻抗性能对比
可以看出,IO-AIC在接触阶段时表现出较强的振动和超调行为,超调量约30 N,超调程度由高到低排列依次是Fuzzy-IO-AIC(15 N),IO-IC(15 N),FO-AIC(10 N),Fuzzy-FO-AIC (2 N)和FO-IC(2 N).这表明,FO-IC和Fuzzy-FO-AIC都具有较好的超调抑制能力。横向结果对比表明,分数阶阻抗由于其固有的阻尼作用,比整数阶有更好的超调抑制能力。纵向结果对比表明,较小的更新速率会产生较小的超调。综合来看,Fuzzy-FO-AIC和FO-IC实际上是具有双重阻尼效果,即分数阶固有属性抑制和较小更新速率双重抑制因子。
图3(c)展示了稳态接触力跟踪性能对比。IO-IC和FO-IC的跟踪效果较差,跟踪误差Fe为0.2~0.3 N.IO-AIC,FO-AIC,Fuzzy-IO-AIC,Fuzzy-FO-AIC均有较好的跟踪效果,其跟踪误差约0.04 N.这表明无论分数阶或整数阶阻抗控制器,其稳态接触力跟踪精度仅取决于更新速率的上边界值,更新速率越大,精度越高。
为进一步验证分数阶阻抗对振动行为的抑制能力,对比整数阶阻抗(IO-IC、Fuzzy-IO-AIC)和分数阶阻抗(FO-IC、Fuzzy-FO-AIC)在突变、高刚度环境下的动态接触过程性能,结果如图4所示。

图4 整数阶与分数阶阻抗在高刚度环境下变力跟踪性能对比
在t=4 s时,环境刚度突然增大,整数阶阻抗和分数阶阻抗均表现出较高的接触超调现象,而分数阶阻抗收敛到稳定状态的速度明显快于整数阶阻抗,说明此刻的振荡行为很快被抑制住。在t=6~8 s时间段,环境刚度增大,基于位置的阻抗控制在高刚度环境接触中极易产生不稳定接触的行为[24],该行为在Fuzzy-IO-AIC中表现最为剧烈,而IO-IC也表现出较小波动,但并没有消失,说明减小更新速率一定程度上有利于抑制该行为,但抑制能力有限。相比之下,分数阶阻抗对不稳定的振动行为具有较好的抑制能力,由此更加突显分数阶阻抗的稳定性和鲁棒性,这种能力是其他控制器所不具备的。
3.2 6-DOF机器人力控打磨仿真
将分数阶阻抗布置到PUMA560 6-DOF机器人上进行力控打磨仿真研究,在运动约束的x方向上进行力控制,其余方向进行运动控制。设定笛卡尔阻抗参数md=30 (N·s2)/m和bd=120 (N·s)/m,分数阶阻抗的近似系数β=0.7.机器人采用逆动力学(PUMA560动力学参数)加关节伺服进行运动跟踪控制,PD参数kp=1e3,kd=35.采样周期同上。
图5(b)展示了IO-IC、IO-AIC、整数阶动态自适应阻抗(integral order dynamic adaptive impedance control,IO-DAHI)[15]和分数阶动态自适应阻抗(fractional order dynamic adaptive impedance control,FO-DAHI)在接触阶段性能对比。可以看出,IO-AIC同样表现出较大的超调行为,随着更新速率减小,振动超调在IO-IC和IO-DAHI有极大的减小,但并没有完全消失。相比之下,FO-DAHI几乎没有超调。从图6(c)稳态跟踪阶段可以看出,IO-IC跟踪精度较差,约为10.5%;而AHI,IO-DAHI和FO-AHI跟踪精度提高,约为7%.因此,6-DOF机器人力控仿真与仿真3.1结果趋势相同。
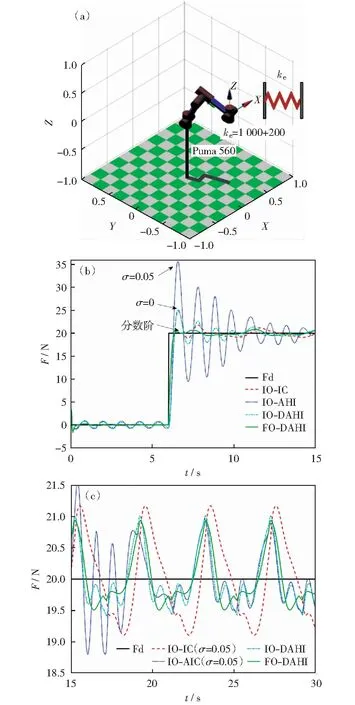
图5 6-DOF机器人接触过程仿真
综合来看,基于分数阶的自适应阻抗具有更好的瞬态和稳态控制性能,远优于当前常用的阻抗控制策略。本质上分数阶阻抗由于具有较好的稳定性,可以适当增大更新速率,在一定程度上进一步提高跟踪精度。
3.3 四足机器人行走过程仿真
图6展示了四足机器人在行走过程中与环境的动态接触过程,对比了纯PD和分数阶阻抗控制的性能。PD控制的参数kp=1e3,kd=1e2.四足机器人主要动力学参数mbody=2 kg,muleg=0.5 kg,mlleg=0.5 kg.分数阶阻抗参数md=1 (N·s2)/m,bd=50 (N·s)/m和kd=1 000 (N·s)/m,阶次取1.7.采样周期同上。
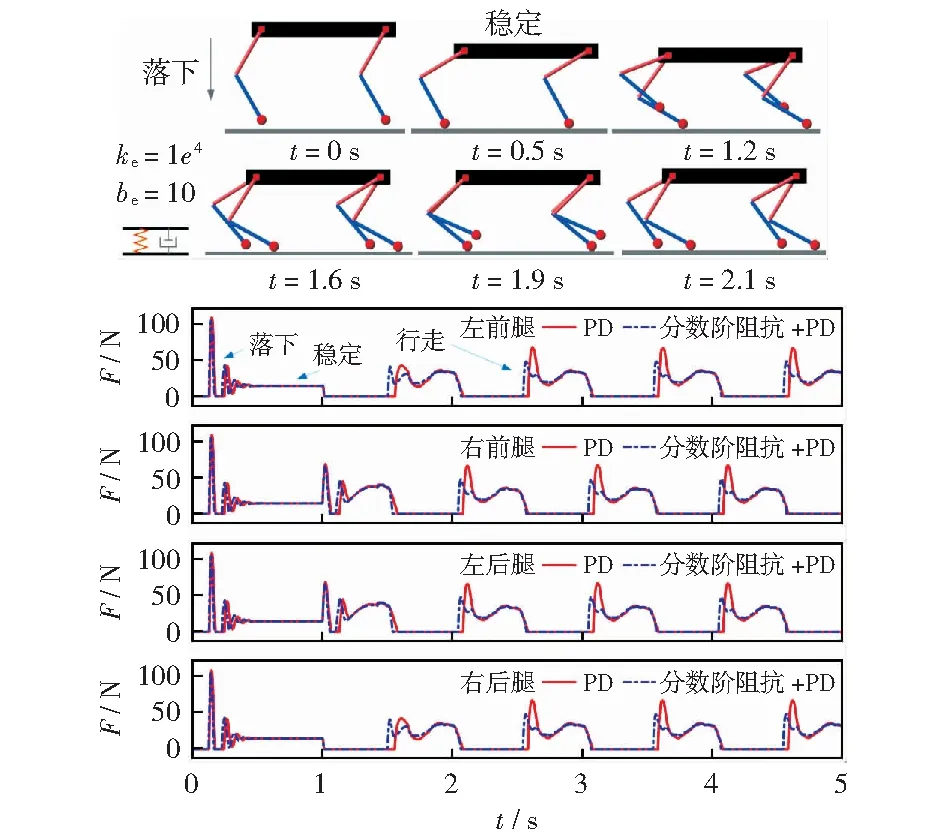
图6 四足机器人行走过程仿真
仿真结果表明,四足机器人从一定高度落下,两种控制方式都不能抑制机器人与地面产生的振荡超调接触力,因此在实际中主动柔顺常常要结合被动柔顺控制才能实现更好的效果。然而,在落地稳定之后,机器人行走过程中,纯PD控制会使得四足机器人的四条腿在与环境接触时都产生比较大的接触超调,超调峰值力约为70 N,而分数阶阻抗直接削减了接触力超调峰值,峰值力均低于50 N.由此,分数阶阻抗使得四足机器人在行走时关节驱动输出更加平顺,这能够有效保护关节不受反复的过载和冲击。
4 结论
本文针对机器人在动态不确定环境下的接触过程控制问题,提出了分数阶阻抗提升接触过程的稳定性。针对分数阶阻抗复杂计算问题,基于其固有属性提出了百分系数转化,并给出了自适应调整边界条件。分数阶阻抗能够直接削减接触过程中产生的接触力超调峰值,对系统产生的不稳定的振荡行为有一定的抑制作用。由此表明,所提控制策略适合机器人与动态未知环境接触交互的控制任务。
