基于空间四杆机构的两足步行机器人研究
2022-11-17杨慧慧
杨慧慧
(国家知识产权局专利局专利审查协作北京中心,北京 100160)
0 引言
四杆机构常用于设计移动机器人的关节或者腿,如Banala等[1]利用四杆机构设计机器人的膝关节以提高步行稳定性。Yamamot等[2]使用平行四边形机构设计了脚踝关节以实现人的足式运动。此外还有一些研究者利用平面四杆机构设计单自由度机器人的腿[3-4]和两足步行玩具[5-6]。
与上述的研究不同,近年来也有一些研究利用单个四杆机构设计移动机器人。如文献[7]利用一个平行四边形机构设计了一种两足滑行四杆机构。文献[8]基于空间4U四杆机构,提出了两足步行移动机构。文献[9]基于两个转动副和圆柱副的空间四杆机构设计了一种双足步行机构。本文通过改变运动副配置,提出了一种新型的空间RCRC步行机构,转动副和圆柱副的轴线都相互平行,其中两个杆件被设计为两足,通过两个曲柄带动足的步行运动。
1 机构设计与自由度分析
1.1 机构设计
如图1所示,该步行机器人是由空间四杆机构组成,包括2个L形状的杆ABD和EGH及2个相同的曲柄AF和HC。其中2个杆之间的连接关系如下:杆ABD与曲柄AF在A点通过转动副R1连接,曲柄AF与杆FGH在F点通过圆柱副C1连接,杆FGH和曲柄HC在H点通过转动副R2连接,曲柄HC和杆ABD在C点通过圆柱副C2连接。转动副R1与圆柱副C1的轴线平行,转动副R2与圆柱副C2的轴线平行,转动副R1与圆柱副C2的轴线垂直,转动副R2与圆柱副C1的轴线垂直。方便期间,将该四杆机构简称为空间RCRC机器人。杆ABD和杆EHF作为机器人的两足,每个足的L形的一端内部设有一个直流电动机,L形的另一端设有滑道,滑道的末端设置一个配重块,使得足的质心在L的拐角处,同时配重块还能够起到增大足的支撑作面的作用。当曲柄AF和HC分别旋转,则将带动两个足交替落地,实现步行运动。机构的参数定义如下:l1为AB的长度;l2为BD的长度;l3为曲柄长度。机构的附图标记定义如下:1为足1;3为足3;2为曲柄AF;4为曲柄HC。

图1 空间RCRC四杆步行机构
1.2 自由度分析
根据RCRC的机构简,机构可认为是两支链的并联机构。其中下平台为杆ABD,上平台为杆EGH,曲柄AF和HC为支链。这样可通过螺旋理论分析该并联机构的自由度。机构自由度的计算修正公式[10]为

式中:d为机构的阶数;n为连杆数目;g为运动副数目;fi为第i个运动副的自由度;ν为虚约束;ξ为冗余约束。
首先根据如图1(c)所示的机构简图,建立运动副的螺旋系。运动服螺旋定义如下:转动副R1的螺旋为$1;圆柱副C1的螺旋用一个移动螺旋$1和一个转动螺旋$3表示;转动副R2的螺旋为$4;圆柱副C2的螺旋同样用一个移动螺旋$5和一个转动螺旋$6表示。θ1和θ2分别为曲柄AF和HC从水平位置转过的角度。如图1(b)建立直角坐标系o-xyz,坐标系原点与B重合,ox轴沿着BD方向,oy轴沿着BA方向,oz垂直于ABD所在的平面。根据几何关系,运动副螺旋$i(i=1,2,… 6)矩阵可表示为:

根据机构位置的不同,自由度分为以下两种情况:
1)当θ1=θ2∈(-90°,90°)∪(90°,270°)时,螺旋矩阵具有一个反螺旋为

由反螺旋可得到,机构绕z轴的转动自由度被限制。进一步因为只存在一个反螺旋,故运动副螺旋矩阵的秩为5,则RCRC两足步行机构有1个公共约束,即λ=1。机构的阶数d=6-λ=5。根据自由度计算公式(1),可得到

通过上述的自由度分析,当机构的杆3处于杆ABD正上方时或者杆ABD处于杆3的正上方的时候,机构处于奇异位置具有两个自由度,此时需要两个电动机控制机构;在其它位置时,机构只需要一个电动机去驱动。
二是具有自动控制功能。在电气自动控制系统中,自动控制技术是必不可少的。当整个运转平台有故障发生时,系统不仅要检测出并警报故障,还要对故障进行紧急应对,以保证全套自动系统及设备的安全。因此,自动控制功能不但能够有效保障设备和人员的安全,还能够提高生产效率。
2 运动学分析
如图1(b)所示,当杆ABD与地面接触,曲柄AF和EH转过θ1和θ2,通过正运动分析,求解上平台各个点在o-xyz坐标系中的位置ri,i为A、B、C、D、E、F,G和H。根据下平台杆ABD中的几何关系得到,点A、B和D的位置如下:
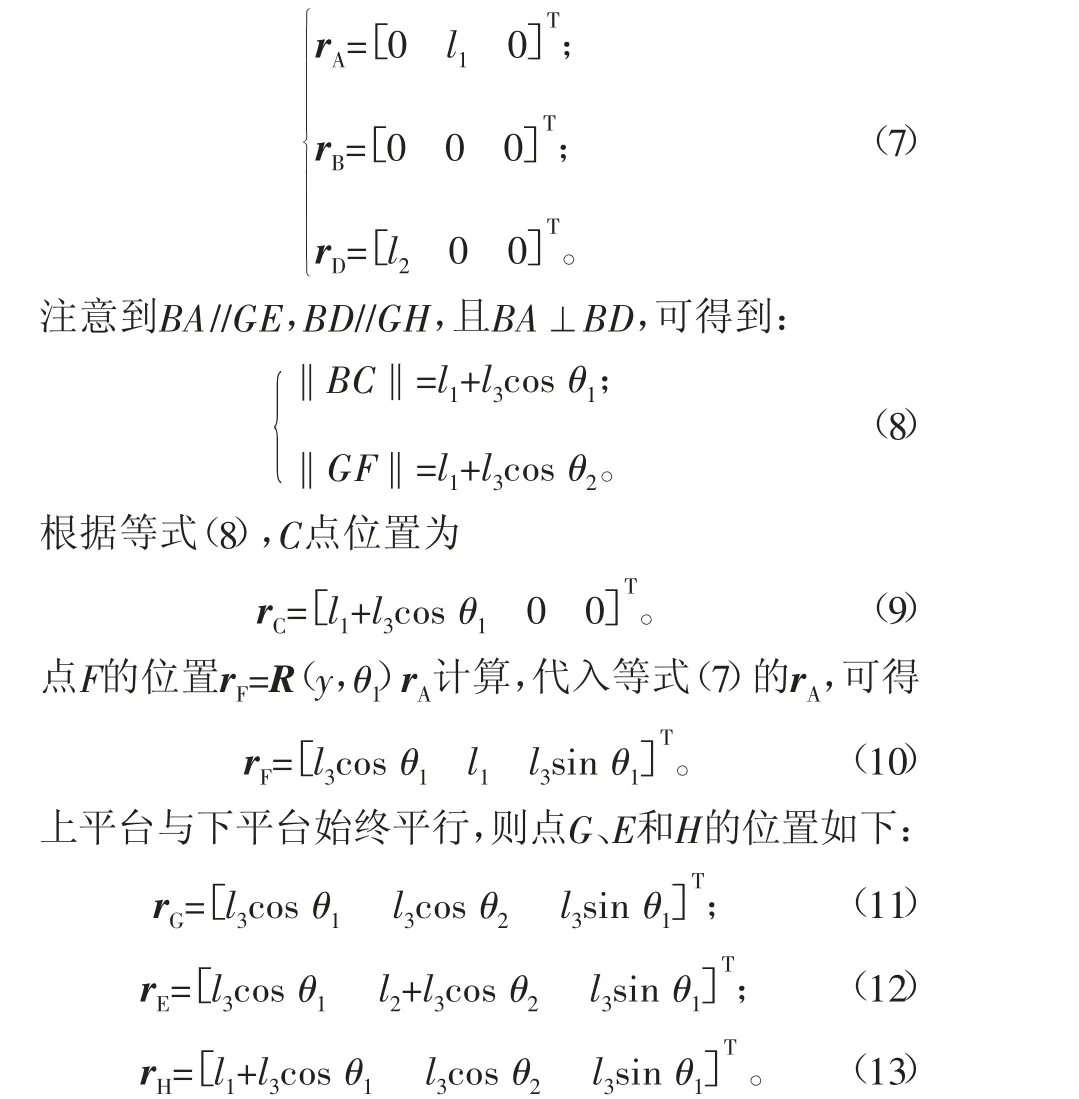
注意到曲柄旋转过程中,上平台相对下平台始终发生平动运动,则θ1和θ2必须满足

根据等式(14),可分为2种情况进一步分别讨论。
第一种情况:θ1=θ2,即2个电动机同速同向转动。点G、E、F和H的位置可重写为:

每个足的短的一端上安装有电动机,长的一端设有配重块,使得两端的质量相同。设足的整体质量为2m,则每段质量为m。则足1和足3的质心可表示为:

第二种情况:π-θ1=θ2,即2个电动机同速异向转动。点G、E、F和H的位置可重写为:

为了验证运动学分析结果,使用表1中的机构参数,根据式(17)和式(19)编写Matlab程序,得到机构在半个周期的质心在地面的投影曲线。图2(a)所示为当2个电动机同向同速转动时质心轨迹曲线,且θ1=θ2∈[0,180°]。图2(b)为当2个电动机异向同速转动时的质心轨迹曲线,且θ1∈[0,180°],θ2=π-θ1。图中三角形区域为足1的支撑区域。

表1 机构参数

图2 电动机转动对应的机构质心
3 步行运动及稳定性分析
3.1 步态规划
本节对机构的运动步态进行规划,如图1中的附图标记,1)初始时刻(θ1=θ2=0°),两足同时着地;2)电动机转动90°,足1支撑,足3抬至最高位置,此时机器人到达奇异位置;3)电动机转动180°,足3返回地面,两足支撑;4)电动机转动270°,足3支撑,足1抬至最高位置,机器人到达另第二个奇异位置;5)电动机转动360°,足1返回地面,机器人回到与初始位置相同的状态,完成一个步行周期。电动机持续以相同的转速和方向周转,则两个足交替落地与抬起,机器人沿着虚线箭头方向运动。2个电动机也可以反向转动,则机器人实现上述运动的反向运动。
3.2 稳定性分析
1)静态稳定性分析。
参照图3,以足1在地面上为例,其支撑区域为由点A、B和D构成的三角形。根据步态分析的描述,当θ1在[0,180°]区间时,足1支撑,要满足步行运动的静稳性,则质心的投影必须在三角形ABD之内。令Q为质心的投影点,则步行静态稳定条件可表示为:

图3 支撑区域

根据式(23),我们得到步行机器人满足静稳性的结构参数设计条件。例如当机器人足的大小确定后(即l1和l2确定),则曲柄长度l3可根据不等式(23)选择。参照表1的机构参数,将l1=105 mm和l2=190 mm代入式(23),得到l3≤52.5 mm。表1中的机构参数满足静态稳定性的要求。
2)动态稳定性分析。
步行机器人的动态稳定性通过机器人的零力矩点(ZMP)是否落在支撑范围之内来判定[11]。当机器人ZMP在其支撑区域之内,满足动态稳定性;反之,ZMP在支撑区域之外,则机器人失去稳定性,将发生倾翻。ZMP可根据伍氏提出的计算通用公式[12]计算:

式中:n为步行机器人构件数目;mi为构件i的质心;x¨i、y¨i、z¨i为杆i在x、y、z方向的加速度;xi、yi、zi为杆i的质心;g为重力加速度。
下面以机构的前半周期为例分析其步行稳定性,当θ1∈[0° 180°],足1支撑在地面。令δ为ZMP点与D的连线和线段BD的夹角,若要使得ZMP点在足1的支撑区域之内,需满足:

将式(15)和式(17)分别代入式(24)得到ZMP为:

我们主要考虑2个电动机在匀速转动的情况下,电动机角速度ω对ZMP的影响。使用表1的结构参数,图5给出了3组不同角速度下的ZMP变化曲线。如图4(a)所示,当ω=π,ZMP始终在三角形ABD支撑区域。如图4(b)所示,当ω≈5.8π时,xzmp=0,ZMP到达支撑区域的左边界AB。如图4(c)所示,当ω≈8.9π时,δ=28.9°,ZMP到达支撑区域的上边界AD。综上,电动机转速ω<5.8π,则ZMP始终在三角形ABD之内;ω∈(5.8π,8.9π),机器人的在边界AB失去动态稳定性,将向AB的左侧倾翻;ω>8.9π,机器人将在边界AD和AB均失去动态稳定性。为了进一步得到机构在失去动态稳定性的位置,设定ω∈{π,5.8π,8.9π},图4(d)给出了δ随θ1的变化曲线,当ω=5.9π,θ1≈62.5°,ZMP点到达上边界AD。图4(e)给出了xzmp随θ1的变化曲线,当ω=8.9π,θ1≈161.5°,ZMP点到达左边界AB。

图4 ZMP随电动机速度的变化曲线
4 结论
基于空间RCRC四杆机构,提出了一种两足步行机器人的设计。根据螺旋理论,对机器人自由度进行分析。并对机器人正运动学进行分析,讨论了机器人保持静稳性的参数设计条件。在运动学分析基础之上,对机器人进行了步态分析。然后,根据ZMP原理,最后对机器人动态稳定性进行分析,得到了电动机角速度对机器人稳定性的影响。在后续研究中,我们将对机器人参数和电动机转矩进行优化设计。
