无人机LiDAR在重大山洪灾害调查中的应用
2022-11-15胡小青李善飞张嘉琦
胡小青,李善飞,张嘉琦
(中国电建集团北京勘测设计研究院有限公司,北京市 100024)
0 引言
山洪灾害频发易发区山高坡陡、植被茂密、人员难以通行,尤其可用数据资料偏少,采用传统的测量方式(人工实测或航测手段)对于效率要求不高的测量能够满足要求,但对于时效性要求较高的重大山洪灾害事件调查而言不再适用。无人机机载激光雷达测量系统具有灵活、便捷、快速、实时的优势,而且其系统建设成本相对于常规测量手段较低,因此该系统出现为重大山洪灾害调查提供了一种更高效快捷的技术实施方案及更精确的基础数据来源。虽然当前有不少学者将激光雷达技术在山洪灾害调查领域中进行了尝试,但概括来说在该领域内积累的经验较少,并没有结合具体项目应用形成一套完整的生产流程。因此本文提出了利用无人机激光雷达技术进行重大山洪灾害事件的快速调查,首先给出了重大山洪灾害事件调查的完整流程,然后对流程中涉及的关键技术进行简要介绍,最后以北京市门头沟区6.18洪水为例进行了应用示范,实现了该区域调查要素的自动提取,并对灾害进行了分析。
1 系统简介
1.1 系统组成
无人机机载激光雷达测量系统定位技术、导航技术、激光测距技术、测控信息传输技术及无人驾驶飞行等技术组成,是一种成本低廉的全新专用化对地观测系统[1,2]。该系统主要由飞行平台、定位系统、挂载部分(成像装置或激光测距系统)以及控制系统四个部分组成。
(1)飞行平台。无人机激光雷达系统以无人机为飞行平台。比如市面常见的固定翼、旋翼无人机。相对于传统的航摄平台,无人机较为灵活,能够进行小区域范围内数据的快速获取,尤其针对植被茂密、人员难以到达的山洪灾害频发区更具适应性[3]。
(2)激光扫描测距系统。主要由机械扫描单元和激光测距单元两部分构成[3],前者决定了激光脚点的分布特征,后者则用来获取每个目标物激光脚点至雷达发射参考点间的距离。
(3)定向定位系统。定位定向系统也即定位和惯性导航系统。差分定位系统能够保证正确的航向,限制漂移;惯性导航系统能够获取弥补GPS信号的中断失锁,两种系统结合可最终获取激光扫描测距系统距离中心发射点的空间三维坐标[4-7]。
(4)同步控制单元与数据处理系统。同步控制单元主要用来实现系统的同步、记录及控制,数据处理系统则通过计算机和相关软件来进行数据的分析。
1.2 系统定位原理
无人机激光雷达系统可通过动态差分GPS接收机获取激光发射瞬间的位置,根据IMU导航定位获取飞行的姿态,并通过激光扫描装置获取激光脚点至参考点的间距,通过相应的坐标变换,按照空间三角测量的原理,即可求出目标点的三维坐标信息[8]。设A点为激光扫描仪投影中心,位置信息由差分GPS提供;β、ω、κ为飞行姿态参数,分别代表俯仰、翻滚及偏航;B点为待求的目标点位置,则目标点位置解算的计算公式如下[9]:

1.3 系统实施作业及点云数据前期处理
无人机机载激光雷达测距系统可获取点云的空间位置信息、回波次数、回波强度及扫描角度等信息,若系统与成像装置集成还能得到影像的光谱信息。论文采用无人机激光雷达系统对山洪灾害调查要素进行提取主要针对的是点云的空间坐标信息。其中无人机激光雷达系统实施作业的总体流程如图1所示。
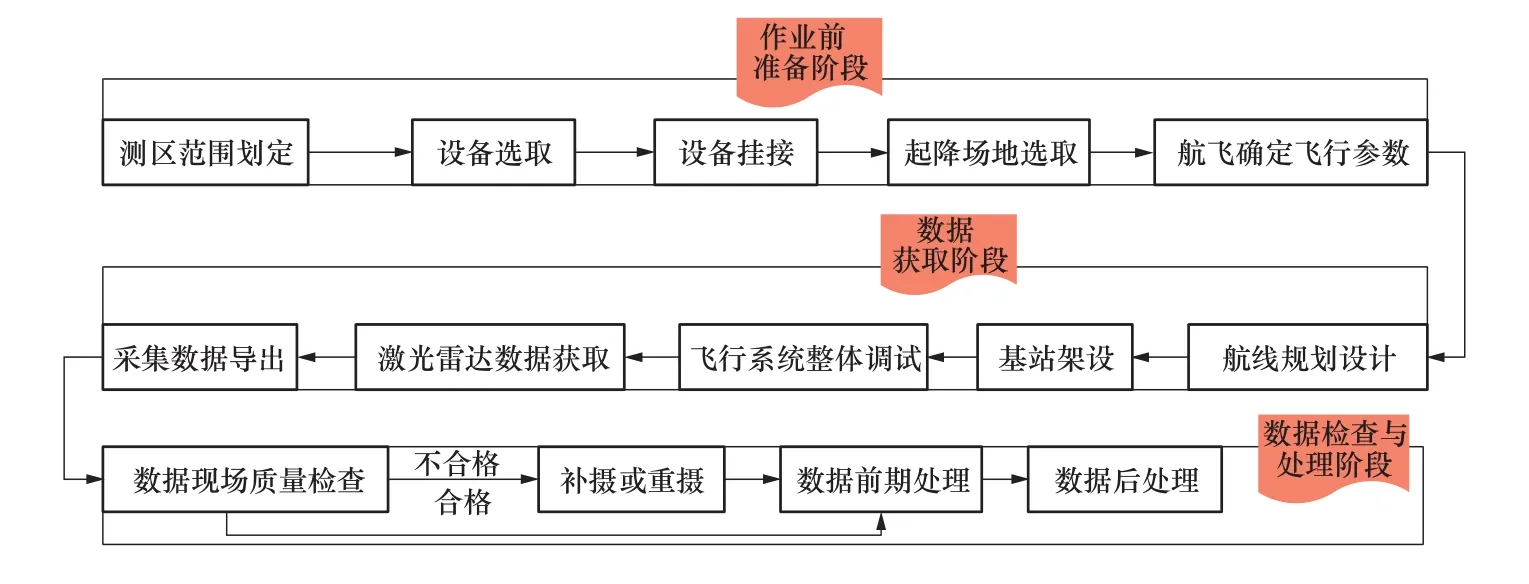
图1 总体作业流程Figure1 Operation process
由图1可知,无人机激光雷达系统实施作业流程基本可分为前期作业准备、数据采集获取与数据检查处理三个主要阶段。其中前期作业准备为作业实施的前提基础,获取数据后需对数据进行检查处理,最终获得处理后的目标成果。
其中点云数据的处理包括前期处理及后处理两个阶段,前期处理为基础数据去噪、裁剪、拼接等,可获取完整且质量较好的基础数据,后期处理则是针对任务目的进行点云滤波、点云分类及信息提取等操作,通常后期处理可借助于现成的商业软件[9,10],但是针对重大山洪灾害事件调查工作并没有形成一套完整的流程,以及快速获取调查要素的一整套完整的处理流程,也没有针对该应用目的的商业软件,因此本文提出了一套山洪灾害调查要素的完整流程,并对流程中的关键技术进行了分析,并基于流程及关键技术进行了软件研发。
2 重大山洪灾害事件快速调查
重大山洪灾害事件快速调查的重点是在较短的时间内给出遥感快速调查的结论。主要内容包括收集高分卫星影像,获取无人机影像、点云数据,比对分析受灾前后的变化,确定山洪灾害的影响范围、山洪灾害的洪水规模以及水利工程的损毁情况。结合现场调查结果,校核对比影像分析成果,收集人员伤亡财产损失数据,给出重大山洪灾害事件遥感快速调查结论。
2.1 山洪灾害快速调查流程
基于高分影像、无人机影像数据进行重大山洪灾害事件快速调查的流程如图2所示。
由图2可知,重大山洪灾害事件快速调查流程如下。

图2 重大山洪灾害事件快速调查流程Figure2 The process of major mountain flood disasters investigation
(1)首先收集灾前遥感影像数据、基础地理信息数据(行政界、居民点、道路、水系等信息),同时获取灾后无人机影像及点云数据,得到应用基础数据。
(2)然后对受灾前后高分影像进行处理,消除各种辐射畸变和几何畸变,并对点云数据进行处理,生成4D产品。
(3)采用面向对象分类自动分类法,辅助人工目视解译方式,对受灾前后影像进行变化检测,提取变化区域,分析山洪水毁数量、洪水规模等相关数据。
(4)其次基于图斑遥感解译结果进行重大山洪灾害事件现场调查,对室内解译成果进行复核验证,同步采集人员伤亡、经济财产损失数据。
(5)最后根据遥感解译成果、现场数据调查结果开展水文分析、演算洪水过程,分析成灾原因和规模,得到重大山洪灾害事件调查结论。
2.2 关键技术与分析
2.2.1 灾前数据处理
遥感影像在获取过程中,会受到诸如大气吸收与散射、传感器定标、地形曲率、空气折射等因素的影响,加上传感器平台本身的高度、姿态等不稳定,同一地物辐射值会有差异[11-13],因此需通过辐射定标、大气校正、正射校正、图像融合、镶嵌与裁剪等操作对灾前高分影像进行处理,消除不变地物的辐射值差异。
2.2.2 灾后数据获取及处理
对重点受灾区域采用无人机激光雷达系统进行高分辨率地形数据采集,包括遥感影像、激光点云数据采集,并对无人机影像及点云数据进行处理。无人机影像易出现旋偏角大、倾角无规律、重叠度不规则、比例尺各异及灰度不一致等问题,其影像处理主要为畸变纠正。灾后点云数据除了常规的处理获取地形信息外,重要的还要对洪水规模进行分析,包括过水断面面积、洪痕水位、河道比降及洪峰流量等信息,采用点云数据进行洪水规模分析的关键在于获取河道横纵断面信息。首先需要获取地面点云,然后通过起始控制点数据获取等间隔的断面点,由方位角及间距计算每个断面点所在的平面位置,并以平面位置为中心设定采样区域范围,采用TPS插值法插值出每个断面点的高程值,继而对断面点连线以及整理数据便可获得最终的河道断面成果。根据河道断面,结合灾后无人机影像与DEM叠加的三维立体图,从3D图上目视解译出洪水痕迹,快速洪痕高程,对照糙率表确定断面处糙率值,然后根据曼宁公式确定洪水规模。其中由地面点云数据、无人机影像获取洪水规模的流程如下。
(1)导入目标区过滤后的地面点云并输入保持河流基本形态的控制点。
(2)在已知控制点之间设置等间隔的断面点,以尽可能地保证河道断面曲线的连续光滑。
(3)计算相邻控制点之间的方位。方位计算当前点为基准,后点为指向点,逐点进行相应计算。
(4)根据设置的断面间隔n及求取的断面方位角w,逐点计算每个断面点的平面位置。计算方法如下:

式中,(x0,y0)为起始控制点或前一断面点的平面位置;(x, y)为任意断面点的平面位置。
(5)获得断面点的平面位置后,以当前断面点为中心设置采样区域,然后以采样区域内的所有点进行高程的插值。统计采样区域范围内所有点数量,若点数小于等于3个点则直接采用平均高程作为地面点的高程,否则采用TPS插值法计算断面点的高程值[14-15],计算方法如式(3)所示。

式中,a0、a1、a2及ci为待求的未知参数,n为已知点数,fi为已知点(yi,yi)的高程值。得到未知参数后,将已知断面的平面未知代入,得到插值后的高程值。
(6)根据河道断面,结合灾后无人机影像与DEM叠加的三维立体图,从3D图上目视解译出洪水痕迹,得到洪痕点高程。
(7)结合遥感影像、断面形态,对照糙率表确定断面处糙率值,可依据纵断面比降公式选取控制断面处顺直处(断面上下游各200m)进行河道比降计算,计算方法见公式(4)。

式中,Z0、…、Zn为从下游到上游沿程各点河底高程,m;L1、…、Ln为相邻两高程点间的距离,m;L为河段全长,m。
(8)最后依据曼宁公式确定小流域不同断面处的洪水规模。

式中,Q为流量,m3/s;A为过水断面面积,m2; R为水力半径,m;J为沟道比降。
2.2.3 受灾前后影像对比分析
因灾前区域选用的是高分卫星影像,灾后为无人机遥感影像,数据源不同,因此受灾前后影像对比分析采用分类后比较方法进行影像分类,并进行分类后的对比分析,识别变化区域。为获取较好的分类结果,项目采用面向对象分类法进行分类,同时在分类过程中充分利用基础地理数据(如河道、居民点等)作为辅助信息进行提取。主要流程包括分割生成影像对象、特征选择、规则集构建、影像分类、分类后处理以及精度评价。
3 北京市门头沟“6•18”石羊沟小流域应用示范
3.1 流域概况
石羊沟流域跨河北省和北京市,其发源于河北省怀来县孙庄子乡麻黄峪村,流经北京市斋堂镇沿河口村,最终汇入永定河。沿河口村以上河长26km,流域面积57km2,其中北京市内辖区面积30.7km2。
在流域上游(河北境内)发育有三条支流域:支流域1即麻黄峪村所在支沟,主沟长3.4km,流域面积11.53km2,支沟14条,平均比降72.3‰;支流域2即光伏发电厂所在流域,主沟长2.0km,流域面积8.76km2,支沟6条,比降89.5‰;支流域3:主沟长1.84km,流域面积4.2km2,支沟9条,平均比降80.5‰。根据第一次水土保持普查,石羊沟小流域乔木林、灌木林等林草植被达到2966.7hm2,占小流域总面积的98%以上。
3.2 灾后遥感快速调查
3.2.1 灾后洪水规模分析
洪水过境后,需要对洪水规模进行分析,包括过水断面面积、洪痕水位、河道比降及洪峰流量等信息。与传统GPS定位测量河道断面不同,本文提出了一种基于激光点云数据进行河道纵横断面快速获取的方法。并以石羊沟小流域为例,在6·18洪水发生后在石羊沟流域下游、市界处结合遥感影像中河道特征基于点云数据生成了三组断面(横断面及纵断面)进行了洪水规模分析(见图3~图5)。

图3 测试1组断面Figure3 Test of the first group section
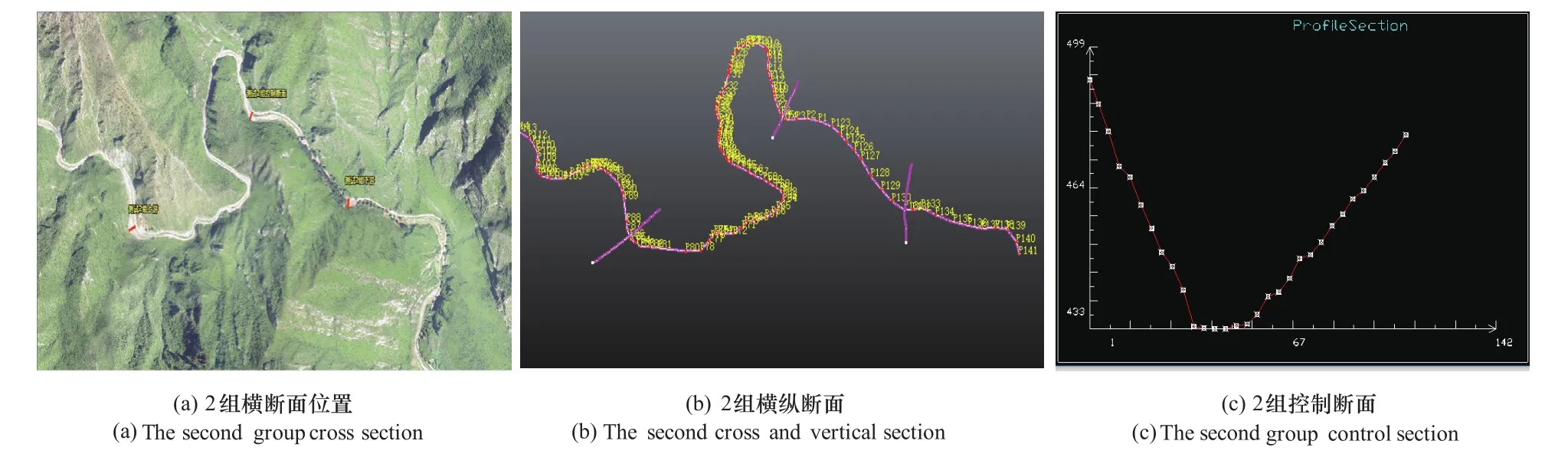
图4 测试2组断面Figure 4 Test of the second group section

图5 测试3组断面Figure 5 The test of the third group section
将灾后无人机影像与DEM叠加,生成三维立体图,从3D图上目视解译出洪水痕迹,快速获得三组控制断面处的洪痕高程,见表1;根据影像呈现的特征,所选的三组测试断面河底均为砂砾,且床面不平整,顺直段距上弯道不远,其中一侧岸壁为石质、陡坡、形状尚整齐,另一侧岸壁略有杂草,形状较为整齐,糙率取值范围为0.03~0.034之间。根据洪痕水位下所围断面面积、河道比降、糙率按照曼宁公式求出三组控制断面的洪峰流量,见表2。

表1 测试断面处洪痕点高程Table 1 Elevation of flood mark point on test section
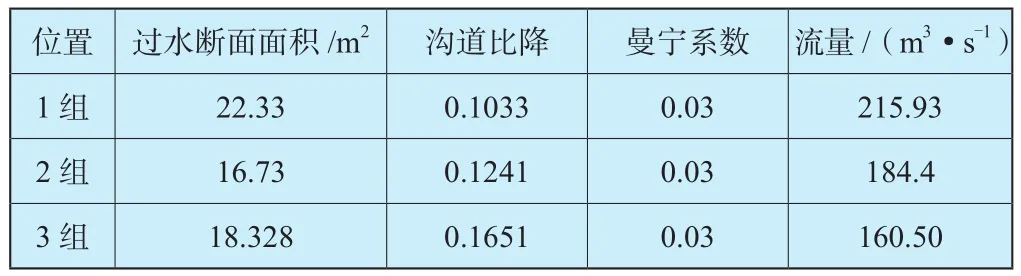
表2 控制断面处流量计算表Table 2 The Flow calculation of control section
结合控制断面起点距、高程、左右边槽坐标以及糙率得 到水位流量关系曲线(见图6)。
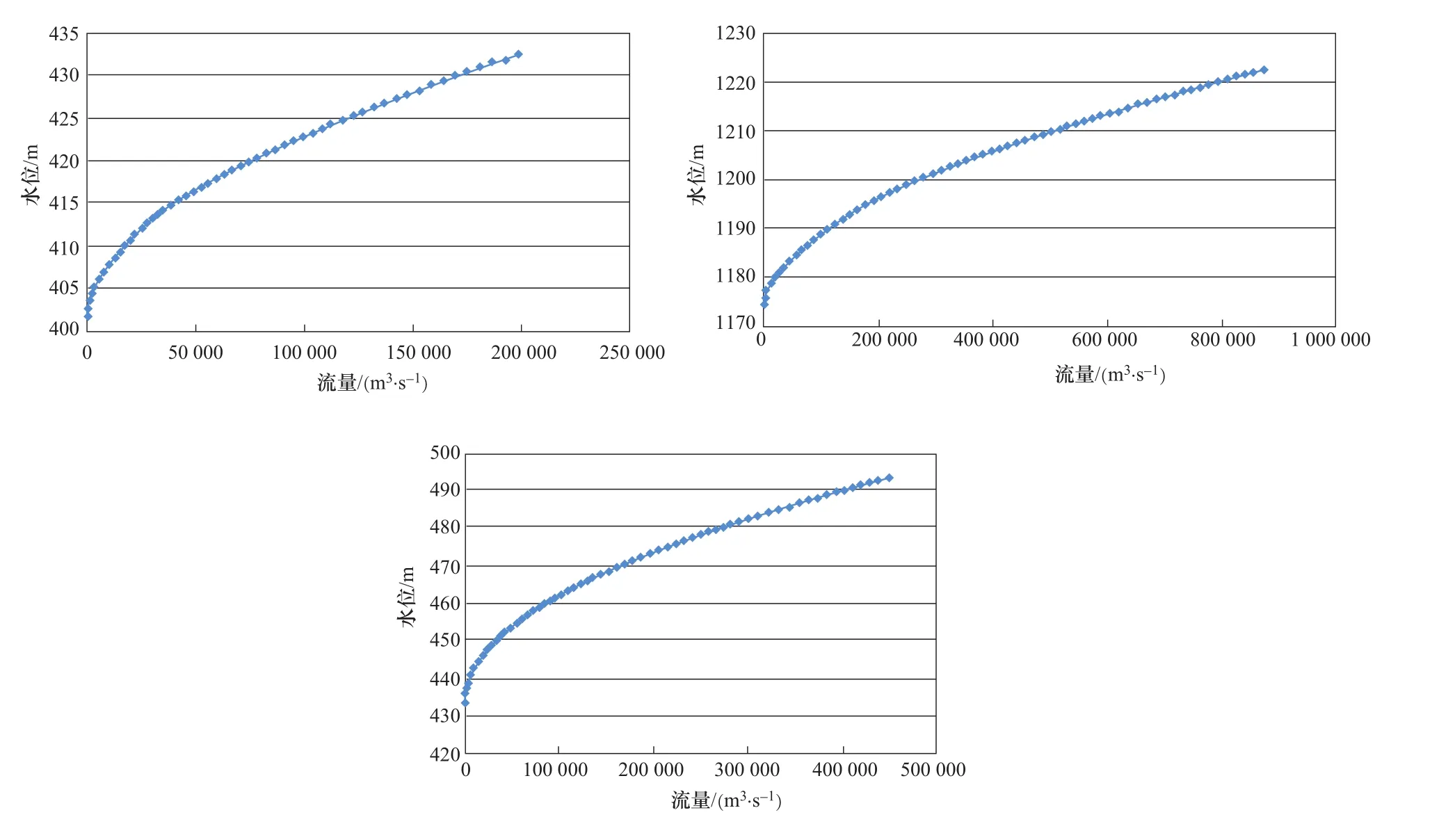
图6 三组测试断面的水位流量关系曲线Figure 6 The rating curve of three test section
3.2.2 灾后遥感调查
对受灾前后遥感影像及无人机影像进行变化监测,初步得出门头沟区6·18山洪灾害主要造成拦水建筑物受损、沟道岸坡损毁、农田果园被淹、自然植被被冲刷,对当地经济产生一定的影响。
通过灾前灾后影像对比分析,由图7(b)可快速地识别变化损毁区域,包括损毁物的空间信息、几何信息(宽度、长度),但难以确定实际损毁长度、损毁建筑物体积等信息,需要进行实地调查考证。根据图7(c)可知道影像拦水建筑物被泥沙覆盖,对灾前影像进行量测,可知标号2处拦水建筑物长度约10.51m,宽度约1.28m,标号3处拦水建筑物长度约14.04m,宽度约1.37m。两处拦水建筑物是否实际发生损毁,需实地进行考证。根据图7(d)中无人机影像及灾前高分影像呈现的对比特征,共判读沟道浆砌石岸坡损毁约5处,均位于沿河口村河岸段,损毁总长度约68.14m;随着洪水冲刷,自然岸坡一侧存在泥沙堆积、岸坡部分坍塌现象,坍塌范围长度约68.32m。由图7(e)可清晰地看出果园被淹的整体情况,结合影像进行目视解译,得到果园被淹面积约为11200m2。
3.3 现场复核
根据影像解译水毁点[见图7(a)],进行现场土壤流失及水毁情况的实地复核(见图8)。通过目视判读解译小流域受灾前后影像,发现小流域内坡面植被普遍较好,现场调查结果与影像判别结果一致。

图8 现场复核结果Figure 8 On-site review results
3.4 结论
将影像判读结果进行实地复核,发现判读结果基本符合实际情况。对于沟道岸坡损毁情况,现场踏勘结果确定浆砌石护岸受损,自然岸坡受到洪水冲积发生破坏,判读位置、长度与实际结果也基本保持一致,说明遥感影像快速判读结果基本可信;对于沟道拦水建筑物损毁情况,遥感影像仅能判读处发生损毁及未损毁前拦水建筑物的几何信息、位置信息,这些信息与实际复核结果基本一致,但实际损毁长度难从影像上直接判读,且当影像上存在目标覆盖的情况时(如泥沙覆盖了拦水建筑物)难以对建筑物是否损毁进行判定,这是遥感影像判读的不足,需要结合实际调查手段来复核遥感快速调查的结果。对于农田果园受淹情况来说,遥感影像调查结果与实地复核结果基本保持一致,判读结果可信。遥感影像对面状区域的判别独具优势,可快速地识别变化范围,有利于灾情的快速识别。
总体来讲,遥感影像在重大山洪灾害事件快速调查上起着不可替代的关键作用,可快速地获取变化的范围以及变化区的详细信息(几何信息、位置信息、纹理信息等),结合现场复核手段对影像调查结果进行复核验证,不仅能省时省力,还能为快速的洪水决策分析提供依据。
4 总结
传统的人工调查手段难以对重大山洪事件进行快速、及时的响应,且难以宏观的知晓灾害发生区域,严重影响了灾害决策工作,难以满足汛期洪水监测与管理工作的要求。无人机激光雷达技术具有覆盖范围广,实时性强等优势,为解决重大山洪灾害事件的快速调查提供了新的技术手段,本文提出了利用无人机激光雷达技术进行重大山洪灾害事件的快速调查,具有一定的现实意义。