激光扫描点云中运动图像边界信息提取方法
2022-11-12刘健欣赵金凤
刘健欣,赵金凤
(平顶山学院,河南 平顶山 467000)
1 引 言
运动图像边界信息可以为运动员训练或者人们平时运动提供更多的借鉴内容,对人体运动姿态跟踪、鉴别以及优化提供参考。运动图像边界信息提取有利于在原有的运动方法基础上改善运动状态[1],提高运动的效率。信息接收媒介主要是图像,在运动图像的采集、存储、传输、显示等各个环节中,存在着运动图像光照不均匀、色彩减少、对比度明暗或曝光过度、细节缺失等现象,使运动图像出现不同程度的退化。人类对运动图像的感知已经由传统的二维成像技术拓展到以激光扫描技术为主的方式,激光扫描技术可以有效去除运动图像中的噪声点[2],将运动图像中背景点云和目标点云有效分离[3],研究运动图像具有至关重要的作用。
在运动图像领域中,对信息有效自动提取直接关系到分析运动结果的质量。国内外相关研究成果众多,文献[4]基于改进Renyi熵的运动目标图像提取仿真,估算运动图像的颜色概率,根据概率确定阈值,并计算运动目标函数,搜索边界完成运动目标图像提取。研究表明,该方法具有较高的性能和准确性。文献[5]提出一种聚类算法在体育视频图像提取与处理中的应用,对两帧的差分结果进行聚类,然后利用中值滤波技术和形态学方法对聚类结果进行提取和处理,得到运动前景目标。在视频目标图像提取过程中,引入了颜色空间聚类算法和滤波算法,降低了图像中的颜色噪声,提高了目标定位的准确性和提取效率。最后设计并实现了提取系统的框架。实验结果表明,该算法具有较好的性能。
虽然上述研究取得一定进展,但是对于得到的数据点密度较低,无法精细提取运动图像边界信息,为此提出激光扫描点云中运动图像边界信息提取方法,该方法创新点是利用激光扫描点云技术扫描信息,获得运动图像脉冲的发射和接收的有效信息,具有较好的性能。
2 激光扫描点云中运动图像边界信息提取
2.1 激光扫描点云运动图像获取
在传统的运动图像边界信息提取中,通常采用机载扫描,在扫描过程中由于距离问题造成了数据点密度较差[6],因此本文在激光扫描点云中应用了激光雷达,该激光雷达是三维激光扫描仪、电荷耦合器件(Charge Coupled Device,CCD)相机、GPS/IMU组合系统以及控制装置的集合[7-8],通过三维激光扫描仪获取运动图像周边的空间信息[9],由此采集边界信息结构。
在激光扫描仪向待测量目标发射一定的激光脉冲后,获取到运动图像脉冲的发射和接收的时间差、距离信息和角度信息,得到以扫描仪为坐标原点的点云坐标,具体如图1所示。
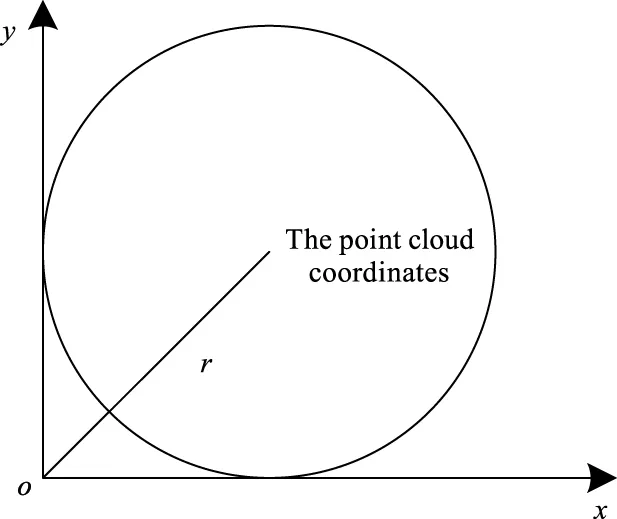
图1 以扫描仪为坐标原点的点云坐标结构图Fig.1 Coordinate structure of point cloud with scanner as coordinate origin
由图1,在运动图像点云坐标获取过程中,对于任意一个激光扫描点云位置,为后续激光扫描点云配准提供了方便。需要满足保证随机两个相邻激光扫描光点云的方向完全一致,且相邻激光扫描点云间观察标签的最佳同步数相同。因为运动图像边界信息是动态的,存在不确定性,导致采集到的边界图像有较多的缺陷,如运动图像漏洞、运动图像动态目标的数据匹配不良等。为了提高识别精度,必须对激光扫描点云的三维运动图像进行预处理。
2.2 扫描运动图像边界信息三维数据预处理
在上述获取激光扫描点云运动图像的基础上,需要对得到的运动图像边界信息三维数据进行预处理,方便运动图像边界信息的提取,提高数据精度[10-11]。在运动信息数据处理的前期,可以建立激光扫描点云空间索引完成离散点之间的关系。具体处理流程如图2所示。
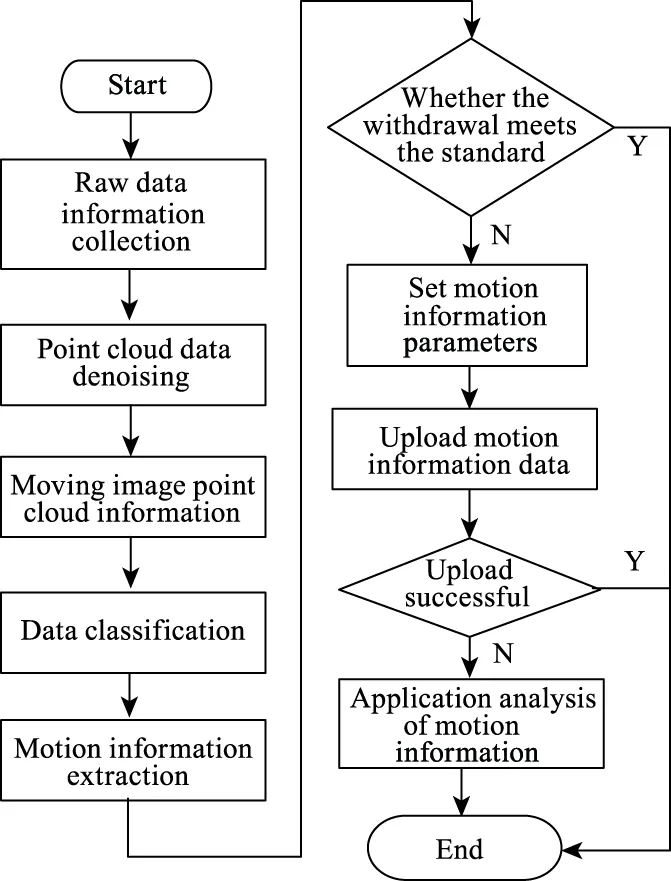
图2 运动图像边界信息扫描预处理流程图Fig.2 Flow chart of moving image boundary information scanning preprocessing
按照上述进行运动信息扫描,同时利用八叉树处理[12],八叉树是基于一维数据的二叉树、存储二维数据的四叉树之上的数据结构扩展,其中的每个节点都是由立方体经过划分而组成的,这种划分方法是基于表示二叉树的线段和表示四叉树的矩形之上的,属于一种三维数据的表达方式。在使用八叉树进行搜索时,先查找最近节点,并对最近邻居的搜索对三个分裂平面进行近似计算,运动图像目标模型结构如图3所示。
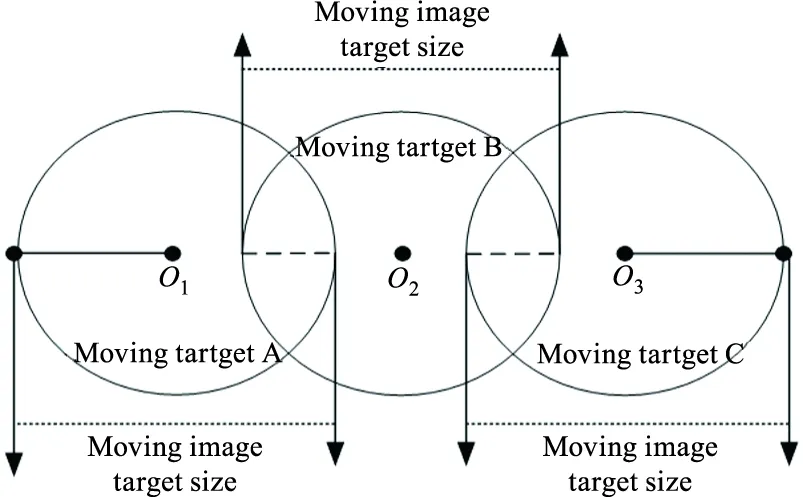
图3 运动图像目标模型结构图Fig.3 Structure diagram of moving image target model
利用运动图像目标模型结构建立离散点之间的关系,需要消除原始点云数据的噪音。基于激光扫描点云数据的特点,需要重新组织原始数据来压缩运动图像边界信息原始数据,可以将点云体素化来实现去噪。八叉树中的一个立方体可以代表一个体素,立方体能够记录体素的位置。其位置信息可以表示为(r,c,h),计算公式为:
(1)
公式(1)中,(r,c,h)分别表示该体素距离全部点云中最小的位置点x、位置点y和位置点z的距离,xmin、ymin和zmin分别表示位置点x、位置点y和位置点z的最小值,通过上述计算建立了点云与体素之间对应关系,完成运动图像边界信息三维数据预处理。
2.3 提取运动图像边界信息中动态目标特征
为了准确有效地提取到运动图像边界信息中动态目标的三维信息,首先要根据运动图像的动态目标特征将其从其他地物中区别开来。为了实现这一目标,使用聚类法对动态目标进行分类提取,需要过滤掉链接部分的不确定因素。在聚类的过程中,将每个点都关联上特征向量,在特征向量中,也会包含几何辐射量值。地物聚类实际上就是过滤掉不确定因素,经过投影后建立起水平格网。在该格网中进行标记,数字1到5分别表示含有点云的格网,Not表示不含有点云的格网,聚类后的格网示意图如图4所示。
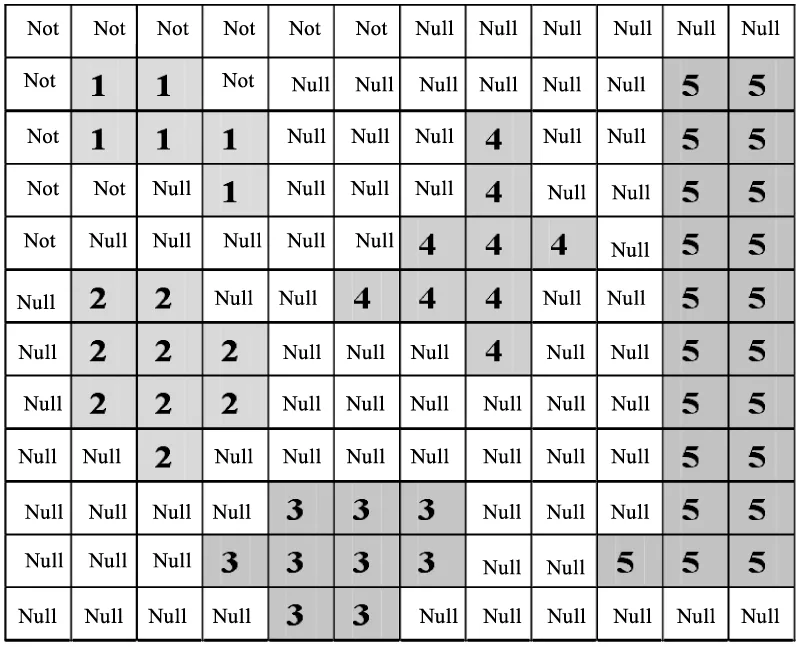
图4 运动图像地物聚类示意图Fig.4 Schematic diagram of moving image feature clustering
由图4可知,在激光扫描过的点云中,运动图像地物聚类分为六个部分,其中格网标记1到5分布着有效的运动图像边界信息,Not部分则不含有点云格网,此处运动图像边界信息无效。经过聚类之后,可以看到若干聚类块,但是一个聚类块中并不代表点云为同一种类,在后续的运动图像特征提取中,还需要将与图像中交叉在一起的其他数据剔除。在得到大的聚类单元后进行分割,计算分布点云的投影面积后,计算投影跨度,进行笔迹理算,完成运动图像边界信息动态目标特征的提取。
3 实验分析
3.1 实验准备
为了测试本文设计的基于激光扫描技术的运动图像边界信息提取方法具有一定有效性,在实验过程中选择某运动员训练时运动图像进行数据采集并进行测试。在激光扫描仪向待测量目标发射一定的激光脉冲后,获取到脉冲的发射和接收的时间差、距离信息和角度信息,得到以扫描仪为坐标原点的点云坐标,激光扫描仪以及惯性测量单元的相关参数如表1所示。
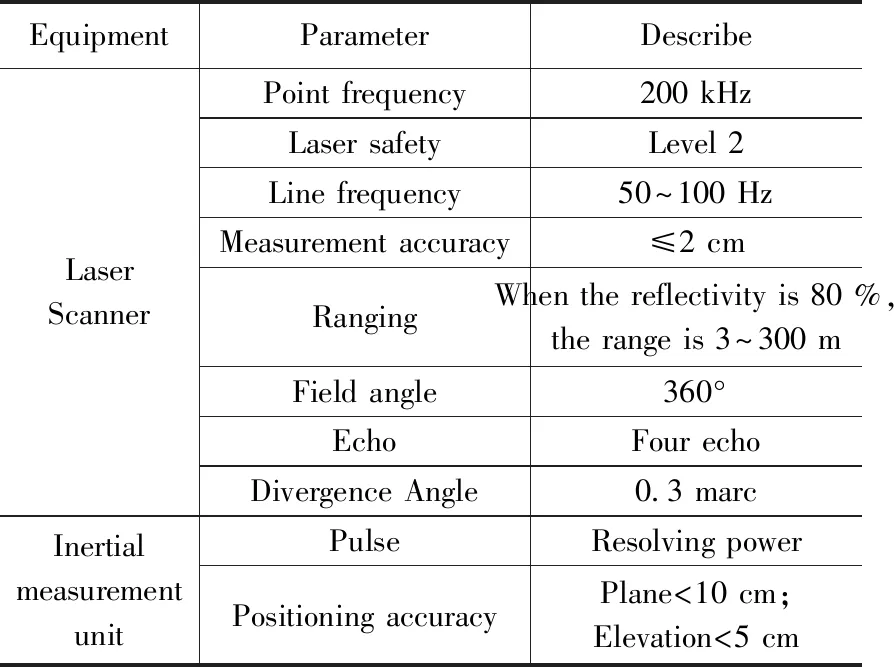
表1 激光测量设备参数Tab.1 Parameters of laser measuring equipment
在以上参数的作用下,将激光扫描点云仪器固定在运动图像测试仪器上,可以在-20~40℃的环境下完成测量。
为了保证实验方法的适用性范围,选择了具有不同特征的三段运动图像,分别为准备开始训练阶段运动图像(为图像1)、训练高峰期时的运动图像(为图像2)以及训练快结束时的运动图像(为图像3)。本文对三个测试运动图像的轨迹数据进行裁剪,使其规则化,在上述的实验环境下,分别使用本文设计的自动提取方法对上述三段图像进行信息的提取,并对实验结果进行分析。
3.2 实验结果统计与分析
在三种不同的三维信息提取方法下,分别得到了各段图像的运动目标点云提取结果。由于篇幅原因,仅展示训练高峰期时的运动图像的三维信息提取结果对比图,运用本文方法前后对比的运动图像点云提取结果如图5所示。

图5 运动图像点云信息提取结果Fig.5 Moving image point cloud information extraction results
图5中,图5(a)为运用本文方法前得到的运动图像激光点云图,图5(b)为运用本文方法后提取到的运动图像激光点云图。在图5(a)中,仅仅能够过滤出低效的观测标签,无法对于运动图像进行有效提取。在图5(b)中,A位置表示的是运动场地的灌木,B位置表示在运动场地分块时被破坏的行道树点云,需要人工对这种不具备行道树特点的植被进行筛选标记,C位置为运动场地行道树后的广告牌,图5(b)能够很好地将运动图像中事物进行提取。
对实验中的三幅图像的三维信息提取结果进行定量分析,在定量分析过程中,选择三个参量进行计算并验证,分别为运动图像提取的准确性、完整性和提取质量。计算公式如下所示:
(2)
式中,p表示运动图像提取的准确性;TP表示实验中检测出的正确运动图像的个数;FP表示错误检测运动图像的个数,也就是说,原本不属于运动图像的提取目标,但是通过提取错误的归类为运动图像的数量;r表示运动图像提取的完整性;FN表示原本属于运动图像的提取目标,但是没有被检测出来的运动图像数量;q表示提取质量。得到两种方法运动图像提取结果的质量评价结果如表2所示。
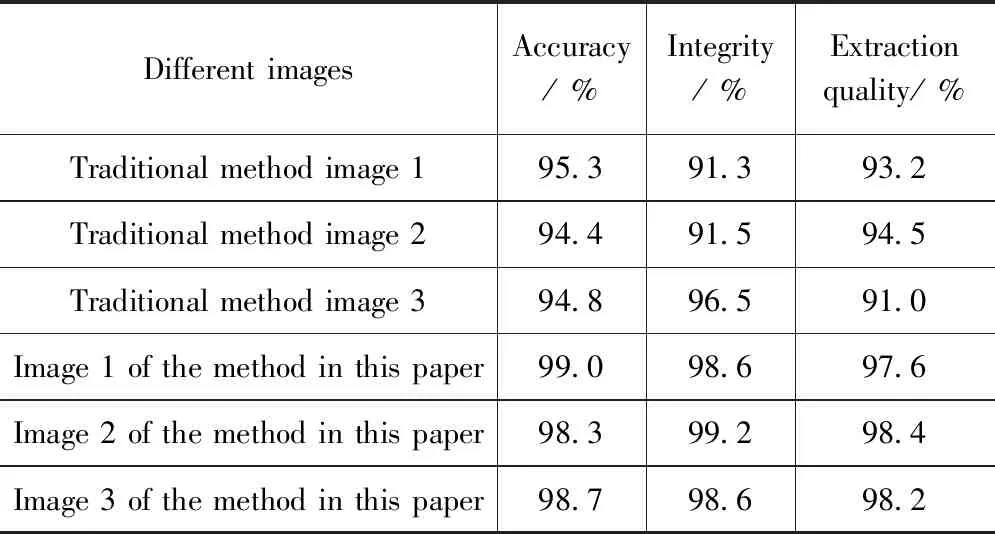
表2 运动图像边界信息提取结果质量评价结果Tab.2 Quality evaluation results of moving image boundary information extraction results
从表2的统计数据中可以看出,在本文设计的激光扫描点云中运动图像边界信息提取方法中,三个图像的准确性、完整性和提取质量都超过了97 %,说明这三个图像的绝大多数的边界信息都被进行了准确的提取,说明本文设计的提取方法相对于传统的提取方法具有更高的提取准确性。
运动图像因受到众多干扰因素的影响,导致采集后曝光强度过大、运动图像模糊虚化以及亮度整体效果不佳的情况,不能够准确提取边界信息的情况,原始运动图像如图6(a)所示,运用本文方法后得到的图像如图6(b)所示。

(a)原始图像
由图6(a)可以看出,原始图像曝光度过强,模糊现象严重,边缘信息过度弱化,看不清楚运动图像细节。在图6(a)基础上,运用所设计激光扫描点云中运动图像边界信息提取方法进行处理后,得到提取效果图像结果,由此可以看出,利用所设计方法得到的运动图像,避免了图像的过度曝光,有效消除了模糊现象,突出了运动图像的边缘细节信息,增加了运动图像清晰度,说明本方法具有较好的提取效果。
4 结束语
本文将激光扫描点云技术应用在了运动图像边界信息提取方法中,探测运动图像边界信息动态目标特征,在激光脉冲的作用下进行目标探测,且表现出了较高的穿透探测能力。预处理激光扫描点云技术生成的数据、提取运动图像点云特征等,完成运动图像三维信息提取,从而实现运动图像边界信息的精确获取。通过实验结果表明,设计的方法在提取的准确性、完整性和提取质量方面均优于传统方法,具有较好的提取效果。
在运动图像边界信息提取过程中,不可避免地被干扰信息或者噪声影响,造成运动图像边界信息提取数据不完整,运动图像数据丢失,此时无法准确地提取这些运动图像的点云和信息,未来可以对此进行更加深入的研究,避免上述情况带来的提取信息不准确问题。
